
Fターム[2F105BB07]の内容
Fターム[2F105BB07]の下位に属するFターム
Fターム[2F105BB07]に分類される特許
1 - 20 / 140
ジャイロ校正のための2回転軸直交ダブルターンテーブル
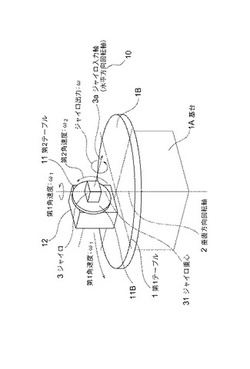
【課題】本発明は、第1テーブル上に、この第1テーブルの垂直方向回転軸とは直交する水平方向回転軸を有する第2テーブルを設けたダブルターンテーブルを得ることを目的とする。
【解決手段】本発明によるジャイロ校正のための2回転軸直交ダブルターンテーブルは、基台(1A)に設けられた垂直方向回転軸(2)に設けられた第1テーブル(1)と、前記第1テーブル(1)上に設けられ、前記垂直方向回転軸(2)に対して直交する水平方向回転軸(10)に設けられた第2テーブル(11)と、を備え、前記各テーブル(1,11)の各テーブル面(1B,11B)は互いに直交している構成である。
(もっと読む)
センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器

【課題】簡単かつ確実に、優れた検出感度を発揮することができるセンサー素子、センサー素子の製造方法およびセンサーデバイスを提供すること、また、かかるセンサーデバイスを備える信頼性の高い電子機器を提供すること。
【解決手段】本発明のセンサー素子は、基部と、前記基部から延出され、通電により駆動振動する駆動用振動腕と、基部から延出され、駆動用振動腕の駆動振動に伴って振動する調整用振動腕241と、駆動用振動腕に加えられた物理量に応じて信号を出力する検出用電極と、調整用振動腕241に設けられ、検出用電極に電気的に接続され、振動腕241の振動に伴って検出用電極とは逆極性の電荷を出力する調整用電極551、553とを有し、調整用電極551は、検出用電極に電気的に接続された共通部60と、共通部60から分岐するとともに調整用振動腕241の延出方向に沿って並んで設けられた複数の分岐部61とを備える。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法
【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
物理量センサ
【課題】本発明は、振動子を用いた物理量センサに関し、物理量センサにおける検出精度の劣化を抑制することを目的とする。
【解決手段】この目的を達成するために、パッケージ8の開口部11に振動子9とIC10を収容し、この開口部11に上蓋12を接着して封口する物理力センサにおいて、開口部11とパッケージ8の外部を連通させる通気口26を、上蓋12における振動子9との非対向部分、或いは接着層31に設けた構成とした。
(もっと読む)
向上した始動中の速度推定のためのジャイロスコープの動的モータ振幅補償
【課題】電力供給後の始動段階において、速やかに正確な速度情報をもたらすことができるジャイロスコープ装置のシステムおよび方法を提供する。
【解決手段】始動中のジャイロスコープ110の動的モータ振幅補償のためのシステムは、始動中のジャイロスコープのモータ振幅成長のモデルに基づいて、アプリオリのモータ振幅信号122を生成するように構成されたアプリオリのモータ振幅モジュール120と、定常状態のスケール係数モジュール124と、アプリオリのモータ振幅信号および定常状態のスケール係数信号を受けるように構成された動的モータ振幅補償モジュール128とを含む。動的モータ振幅補償モジュールは、ジャイロスコープからの測定されたモータ振幅信号116、アプリオリのモータ振幅信号、を受け、始動段階の間に、検出された速度信号に適用される時変スケール係数130を出力する。
(もっと読む)
水平に向けられた駆動電極を有するMEMSジャイロスコープ
【課題】MEMS(微細電気機械システム;microelectromechanical system)ジャイロスコープのレートバイアス誤差及びスケールファクタ誤差を減らすデバイス及び方法を開示する。
【解決手段】1つ又は複数の水平駆動電極92、94、96、98を含む少なくとも1つの基板68と、1つ又は複数の水平駆動電極92、94、96、98から垂直に間隔をあけられ、これに隣接する可動電極64、66とを含めることができる。水平駆動電極92、94、96、98及び/又は可動電極64、66は、デバイスの感知軸72の方向での可動電極64、66の変位から生じるレートバイアス誤差及びスケールファクタ誤差をなくすか減らすように構成することができる。
(もっと読む)
多軸センサ出力補正装置及び多軸センサ出力補正方法
【課題】物理量測定素子の感知方向と標準座標系の対応する標準軸とがずれても、標準軸の感度の直交性を有する物理量を求める多軸センサ出力補正装置及び方法を提供する。
【解決手段】本発明の多軸センサ出力補正装置は、一つの物理量における特定方向の成分を測定する軸センサを複数組み合わせて構成された多軸センサの軸センサ毎の軸センサ測定物理量を、標準座標系の標準軸に対する軸ずれを補正し、標準軸に対応する軸センサ対応物理量に補正する装置であり、軸センサ各々が測定する軸センサ測定物理量を、標準軸の軸センサ対応物理量に補正する補正係数が記憶された記憶部と、この記憶部の補正係数により、軸センサ測定物理量を軸センサ対応物理量に補正する測定値補正部を有し、標準座標系における方向と強さとが自明の物理量である印加物理量を、軸センサに与えて軸センサ出力値を得て、印加物理量と軸センサ出力値から補正係数が求められている。
(もっと読む)
センサ装置
【課題】検出値に関する経年変化の影響を容易に認識し得るセンサ装置を提供する。
【解決手段】ジャイロセンサ20では、メモリ22には、装置の製造時に各検出条件に応じて角速度検出部23により検出され得る初期検出値が予め記憶される。そして、上記特性変化検査用情報設定処理を実行する制御部21により、角速度検出部23により検出される現角速度検出値とこの検出値の検出条件に対応する初期角速度検出値とが入出力インタフェース25を介して検査装置30に出力される。
(もっと読む)
取り付け角度検出装置、方法、プログラムおよび記録媒体
【課題】ピッチジャイロ等の検出装置の取り付け角度の検出の信頼性を高めた取り付け角度検出装置、方法、プログラムおよび記録媒体を提供する。
【解決手段】所定の検出範囲における車両のヨー角変化量θzを取得するヨー角変化量取得部110と、ピッチジャイロ21に検出された検出値に基づいて、上記検出範囲におけるピッチ角変化量θyを算出するピッチ角変化量算出部120と、ヨー角変化量取得部110により取得されたヨー角変化量θzと、ピッチ角変化量算出部120により算出されたピッチ角変化量θyと、の比に基づいて、ピッチジャイロ21の車両に対するロール軸回りの取り付け角度φxを検出する取り付け角度検出部130と、を備えることにより、ピッチジャイロ21等の検出装置の取り付け角度φxの検出の信頼性を高めることができる。
(もっと読む)
角速度センサ
【課題】本発明は、2の補数表現だけでなく、他の符号付数値表現でも容易に出力信号を出力する角速度センサを提供することを目的とするものである。
【解決手段】この目的を達成するために、本発明の角速度センサは、AD変換器73からの出力信号を補正する補正演算手段74とを備えるとともに、さらに補正演算手段74の後段に符号付数値表現変換回路76を設けたため、これにより、2の補数表現からオフセットバイナリー表現の出力信号に変換することができるから、容易に、他の符号付数値表現での出力信号を出力することができる。
(もっと読む)
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
(もっと読む)
車両用現在位置検出装置
【課題】角速度に対する出力電圧特性が非線形のジャイロスコープを用いても、精度よく車両の走行軌跡を推定できるようにする。
【解決手段】角速度センサ22の出力値のゲイン誤差として、角速度センサ22の車両への取り付け角度を要因とする取り付け角ゲイン誤差と、角速度センサ22の角速度に対する非線形ゲイン特性を要因とする角速度ゲイン誤差とを区別して推定する。すなわち、カルマンフィルタAにより取り付け角ゲイン誤差を推定した後、カルマンフィルタBにより取り付け角ゲイン誤差および角速度ゲイン誤差の推定を実施する。
(もっと読む)
分割またはスキュー作動要素を用いる振動慣性速度センサ
【課題】駆動要素と検出要素の間の角度関係の調整能力と対称性塊構造体の維持能力の両方を提供する。
【解決手段】振動慣性速度センサは、ノードまたは反ノードの基準線から回転偏位または「スキュー」される軸を画成する作動要素を備える。前記スキューは、別個のノードまたは反ノード基準線に関連し得るか、または同じノード線周りに「分割」される要素型をとり得る。駆動信号と検出信号の両信号は、共通組の検出要素から分解され得る。駆動要素はまた、ジャイロスコープの能動トルクに作用をすべく、振動パターンを回転偏位するスキュー軸角度で作動し得る。スキュー駆動要素は、同じデバイス上のスキュー要素または分割要素と組合わされ得る。スキュー検出要素は、一か複数のノード線を備える振動システムに適用され得る。スキュー駆動要素は、能動トルクに作用すべく二つ以上のノード線を備える振動システムに適用され得る。
(もっと読む)
角速度検出装置
【課題】センサ部と検出部とを電気的に接続する接続手段の駆動信号伝達線が断線しているか否かを判定することができる角速度検出装置を提供する。
【解決手段】C/V変換回路23は、可動電極に搬送波信号Vsが印加され、固定電極に駆動信号Vsv+、Vsv-が印加されるコンデンサCs1〜Cs4の静電容量を変換した電圧Vcvを出力する。判定ロジック25は、コンパレータ24を通じて電圧Vcvをレベル変換した電圧Vcmpに基づいて、サーボ制御を行うための駆動信号Vsv+、Vsv-を回路チップ3側からセンサチップ2側に伝達する接続ラインL1〜L4の断線を判定する。
(もっと読む)
方向検出装置及びこれを用いたゲームシステム
【課題】地磁気センサを利用した補正を適切に行うことが可能な方向検出装置を提供する。
【解決手段】本体部としての筐体2とその筐体2に対して方向が変化する可動部としての3Dグラス3とを有するゲーム機1に適用される方向検出装置において、筐体2に設置される固定側地磁気センサ18と、3Dグラス3に設置されるジャイロセンサ15と、3Dグラス3に設置される可動側地磁気センサ17とを設け、ジャイロセンサ15の出力に基づいて、3Dグラス3の筐体2に対する方向を判別し、固定側地磁気センサ18及び可動側地磁気センサ17のそれぞれの出力に基づいて、ジャイロセンサ15の出力に基づいて判別した方向を補正する。
(もっと読む)
慣性航法装置
【課題】方位角の初期化誤差を小さくする。
【解決手段】ジャイロ11と、外部INS20の検出角速度とジャイロ11の検出角速度を用い、外部INS20に対する取付けミスアライメントを推定する角速度マッチング部41と、外部INS20が出力するロール角、ピッチ角及び方位角とジャイロ11の検出角速度を用い、外部INS20に対する取付けミスアライメントを推定する角度マッチング部42と、慣性航法装置の姿勢角を求める姿勢角演算部と、姿勢角の変動から求められる動揺レベルにより角速度マッチング41で推定される取付けミスアライメント、角度マッチング部42で推定される取付けミスアライメント及び取付けミスアライメントの推定値がゼロのうち、いずれかを選択して出力する選択部43と、外部INS20から入力される方位角を選択部43の出力によって補正する補正演算部14とを備える。
(もっと読む)
運動センサを動作させる電力効率の高い方法
補正ユニットを有するコリオリジャイロスコープおよび直交バイアスを低減するための方法
コリオリジャイロスコープ(1)は、励起されて、第1軸に平行な振動を行うことが可能であり、前記第1軸に垂直な第2軸に沿ったコリオリ力による前記質量系の変位が検知可能である質量系と、少なくとも1つの第1補正ユニット(30)、および少なくとも1つの第2補正ユニット(40)であって、各々、複数の静止補正電極(31,32,41,42)および移動補正電極(24,25,26,27)を含み、前記静止補正電極(31,32,41,42)は、第1軸の方向に延びて、対応するアンカー構造によって基板にしっかりと接続され、前記移動補正電極(24,25,26,27)は、前記質量系の一部分である第1および第2補正ユニットとを含む。この種類のコリオリジャイロスコープ(1)の直交バイアスを低減するための方法は、少なくとも一時的に一定の補正電圧を、補正ユニット(30,40)に印加することを含む。  (もっと読む)
(もっと読む)
検知情報補正装置、可搬型装置、検知情報補正方法、およびコンピュータプログラム
【課題】ユーザが与えようとした指令などの誤認識が従来よりも低減されるように、モーションセンサによって検知される検知情報を補正する。
【解決手段】携帯電話端末1に次の手段を設ける。モーションセンサ10hによって検知された検知情報に基づいて携帯電話端末1の姿勢を判定する端末姿勢判定部121と、特定のタイミングごとに、検知情報を補正するためのデータである補正用データを、検知された状態に応じて取得する補正値取得部124と、最新の補正用データを用いて、モーションセンサ10hによって検知された検知情報を補正する補正演算部125と、を設ける。
(もっと読む)
回路モジュールおよび回路モジュールの製造方法
【課題】加速度センサの回路基板に対する傾斜角を高精度に制御し、高精度の加速度検出の可能な加速度センサを提供する。また、方位を高精度に維持する必要のある電子デバイスの実装において、傾斜角誤差を低減する。
【解決手段】複数の固定点で固定され、表面に素子搭載部および回路パターンを形成した回路基板10と、前記回路基板の素子搭載部に搭載された素子チップ20とを具備した回路モジュールであって、素子チップ20を、回路基板の1辺上の所定の間隔を隔てた位置から形成された2本のスリット21によって形成され、前記回路基板の中心近傍から前記1辺上に延びる片持ち梁22の内方端近傍に実装した。
(もっと読む)
1 - 20 / 140
[ Back to top ]