
搬送システム

【課題】イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムを提供すること。
【解決手段】駆動コンベア1を有する複数のステーション2,3と、各ステーション前に停車する台車4と、複数のステーションを結ぶレール5とを備え、ステーションに、駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車に、出力部に着脱自在に接続される入力部7と、入力部から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、回転体はレールに係合する。
【解決手段】駆動コンベア1を有する複数のステーション2,3と、各ステーション前に停車する台車4と、複数のステーションを結ぶレール5とを備え、ステーションに、駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車に、出力部に着脱自在に接続される入力部7と、入力部から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、回転体はレールに係合する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば、ワーク等の搬送物の搬送に用いられる搬送システムに関する。
【背景技術】
【0002】
コンベアによって構成された搬送ラインにワークを流してワークに対する加工等を順次行う各種組立工場等では、多くの場合、作業者が搬送ラインを挟む二つの通路の一方から他方に移動するためには、搬送ラインの端まで一旦回り込まなければならず、搬送ラインを横切ることはできない。しかし、例えば、搬送ラインが長く延び、斯かる搬送ラインを回り込んでの移動を頻繁に行う必要がある場合には、その動線の長さは作業性等の向上を図る上で看過することのできない問題となる。
【0003】
そこで、図21(A)及び(B)に示すように、搬送ラインの途中に、それぞれコンベア51を有する上流側ステーション52及び下流側ステーション53を設け、両ステーション52,53を引き離して作業者の通行用スペースを確保すると共に、両ステーション52,53間を往復移動してワークWを移送する無人車(AGV)54を設けることが考えられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4419659号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、この方法では、無人車54が駆動モータ用のバッテリー(図示していない)を具備した内部電源方式(自走式)を採用したものであると、バッテリーの搭載に伴う重量化に対応するために高出力の駆動モータ(図示していない)が必要となる。また、作業者が各ステーション52,53前のスペース内に立ち止まって重量化した無人車54と衝突したりしないように、立ち入りエリアを制限する安全柵55や立ち入りを感知して無人車54の緊急停止に繋げる感知センサー(光電管等)56をステーション52,53毎に設置する必要もある。さらに、無人車に備え付けた制御機器(図示していない)に、緊急停止等をも含めた無人車の往復移動の制御を行わせる場合、その制御内容は非常に複雑なものとなる。そして、これらの点は全てイニシャルコストの上昇に結び付く。
【0006】
そこで、両ステーション52,53間のワークWの移送を、内部電源方式の無人車54に担わせる代わりに、外部電源方式の軌道(有軌道)台車(図示していない)に担わせることが考えられる。この方法によれば、台車が両ステーション52,53間を往復移動する際、台車に接続された電力ケーブルを介して外部から台車の駆動モータへと電力が供給されることになる。従って、台車へのバッテリーの搭載を省略して軽量化を図ることができ、さらには、低推力のモータを駆動モータとして使用することにより、安全柵55や感知センサー56の設置を不要とすることができ、制御内容の簡易化も図れる。しかし、台車に繋がる電力ケーブルが、台車の移動範囲や移動ルートを制限したり、搬送ラインを横切る作業者にとって邪魔になったりする恐れがある。
【0007】
ここで、特許文献1には、軌道台車に駆動モータを使用せず、台車部に載置されるワークの荷重を利用して台車部を往復移動させる技術が開示されており、この技術によれば、台車部の駆動専用の内部電源は勿論、外部電源からの電力を供給するための電力ケーブルも不要となる。
【0008】
しかし、この技術を用いる場合、台車部に載置されたワークは台車部と共に往路を進むに連れて下降するため、移動開始位置におけるワークの高さよりも移動終了位置におけるワークの高さの方がそれだけ低くなり、搬送距離を伸ばすとこの下降幅の大きさは顕著となって、台車部へのワークの搬入高さと台車部からのワークの搬出高さとを一致させるには、ワークを何れかの時点で上昇させるリフター装置の設置が必須になり、この設置はイニシャルコストを引き上げることになる。しかも、台車部の移動距離はワークの重量に依存して変わるので、多品種のワークが流れる混合ラインに、ワークの荷重を利用するこの技術を適用することは困難となる。
【0009】
本発明は上述の事柄に留意してなされたもので、その目的は、イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムを提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る搬送システムは、搬送物を搬送するための駆動コンベアを有する複数のステーションと、搬送物を移載するために各ステーション前に停車する台車と、複数の前記ステーションを結ぶように延びるレールとを備えた搬送システムであって、前記ステーションに、前記駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部が設けられ、前記台車に、前記出力部に着脱自在に接続される入力部と、該入力部から入力された前記回転運動エネルギーを位置エネルギーに変換して備蓄した後、該位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、前記回転体の回転運動エネルギーが、前記台車が複数の前記ステーション間を移動するための運動エネルギーに変換されるように、前記回転体は前記レールに係合する(請求項1)。
【0011】
上記搬送システムにおいて、前記エネルギー備蓄機構は、上下方向に延びるボールねじ軸と、該ボールねじ軸に螺合し、該ボールねじ軸が一方向及び逆方向の軸回りに回転するのに伴って該ボールねじ軸に沿って昇降するようにガイドされた昇降部材と、前記ボールねじ軸と連動して回転する前記回転体とを備え、前記入力部から入力された前記回転運動エネルギーは、前記ボールねじ軸を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸の一方向の軸回りの回転に伴って上昇する前記昇降部材の位置エネルギーとして備蓄され、備蓄された前記位置エネルギーは、前記昇降部材が自重により下降するのに伴って前記ボールねじ軸を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、該ボールねじ軸と連動するように構成された前記回転体の回転運動エネルギーに変換されてもよい(請求項2)。
【0012】
上記搬送システムにおいて、前記台車は二つの前記ステーション間を往復移動するように構成されていると共に、該二つのステーションを結ぶ前記レールは対向配置された一対の係合レールからなり、前記台車に、該台車が前記二つのステーション前に停車するときに、前記一対の係合レールの一方に係合する状態の前記回転体を前記一対の係合レールの他方に係合する状態に切り換えるための切換え機構が設けられていてもよい(請求項3)。
【0013】
上記搬送システムにおいて、前記台車に、前記入力部から入力された前記回転運動エネルギーによって駆動する従動コンベアが設けられていてもよい(請求項4)。
【発明の効果】
【0014】
本願発明では、イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムが得られる。
【0015】
すなわち、本願の各請求項に係る発明の搬送システムは、各ステーションの駆動コンベアから出力部を介して台車にエネルギーを補給することができるものであり、台車に対する内部電源の搭載を不要としてイニシャルコストを低減することができ、また、外部から台車への電力供給も不要であるので、弊害の発生を伴う電力ケーブルの接続を台車に行う必要もない。さらに、台車の移動の前後で搬送物の保持高さを一定に保つことができるので、搬送物の台車への搬入高さと台車からの搬出高さとを一致させるために、リフター装置等の他の装置を用いる必要もない。
【0016】
上記特許文献1に記載された軌道台車では、搬送物の荷重が搬送物の搬送に消費されるエネルギーに変換されるものであるため、搬送物の荷重によっては搬送距離が伸びず、搬送が途中で終了してしまう懸念があるが、本発明の搬送システムでは、各ステーション前で常に十分な一定量のエネルギーを台車に供給可能であるので、搬送物の確実な搬送を実現することができる。また、各ステーション前での台車に対するエネルギーの備蓄量を増減すれば、搬送距離も自在に変更することができる。
【0017】
請求項2、3に係る発明の搬送システムでは、台車を移動させる構成のシンプル化を図ってイニシャルコストのさらなる低減に寄与することができる。
【0018】
請求項4に係る発明の搬送システムでは、台車に従動コンベアを設けることにより、各ステーションと台車との間の搬送物の移送をスムーズに行うことができる。
【図面の簡単な説明】
【0019】
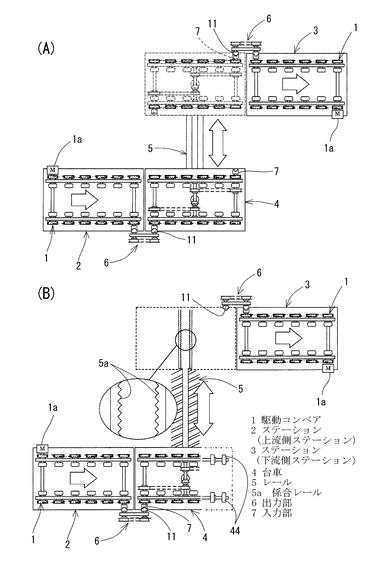
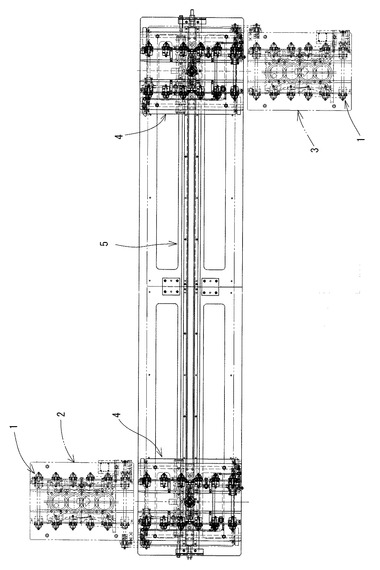
【図1】(A)及び(B)は、本発明の一実施の形態に係る搬送システムの構成を概略的に示す平面図及び説明図である。
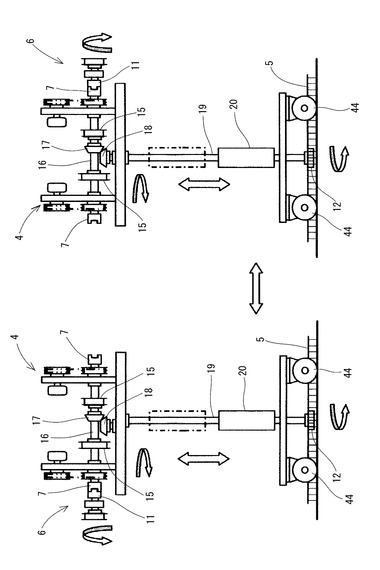
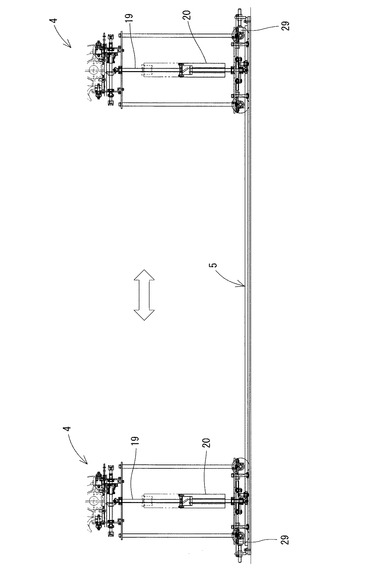
【図2】前記搬送システムの台車の構成を概略的に示す説明図である。
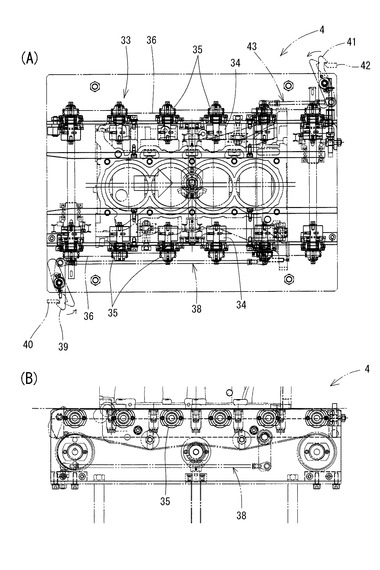
【図3】(A)は前記台車の構成を概略的に示す平面図、(B)は前記台車の上部の構成を概略的に示す正面図である。
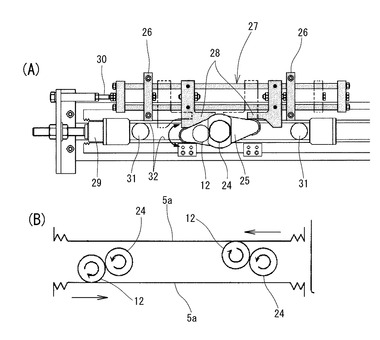
【図4】(A)及び(B)は、前記台車の切換え機構の構成を概略的に示す平面図及び説明図である。
【図5】前記切換え機構の構成を概略的に示す正面図である。
【図6】前記搬送システムの平面図である。
【図7】前記台車の作動を概略的に示す正面図である。
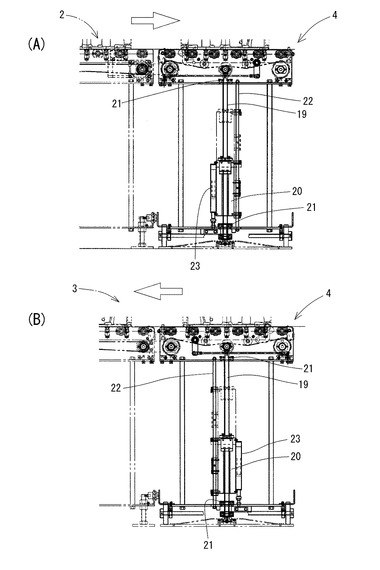
【図8】(A)は搬入時における前記台車の側面図、(B)は搬出時における前記台車の側面図である。
【図9】上流側ステーションの出力部と前記台車の入力部の横断面図である。
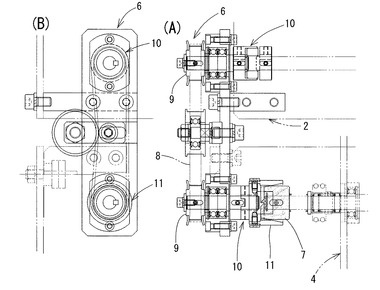
【図10】(A)及び(B)は、前記入力部が接続された状態の前記上流側ステーションの出力部の横断面図及び側面図である。
【図11】下流側ステーションの出力部と前記台車の入力部の横断面図である。
【図12】(A)及び(B)は、前記入力部が接続された状態の前記下流側ステーションの出力部の横断面図及び側面図である。
【図13】(A)及び(B)は、前記台車のエネルギー備蓄機構の透視平面図及び正面図である。
【図14】(A)及び(B)は、図13(A)におけるX―X線断面図及びY−Y線断面図である。
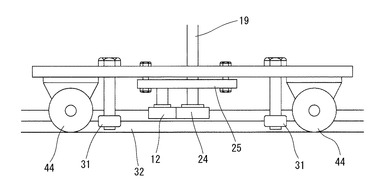
【図15】(A)は前記台車の下部の平面図、(B)は(A)におけるX―X線断面図である。
【図16】(A)は前記台車の下部の透視平面図、(B)は(A)におけるX―X線断面図である。
【図17】前記台車のボールねじの要部の横断面図である。
【図18】前記切換え機構の正面図である。
【図19】(A)及び(B)は、前記台車の従動コンベアの透視平面図及び正面図である。
【図20】前記従動コンベアの縦断面図である。
【図21】(A)及び(B)は、従来の搬送システムの構成を概略的に示す平面図及び正面図である。
【発明を実施するための形態】
【0020】
本発明の実施の形態について図面を参照しながら以下に説明する。
【0021】
本実施の形態に係る搬送システムは、図1(A)及び(B)、図6に示すように、ワークW(搬送物の一例)を搬送するための駆動コンベア1をそれぞれ有する上流側ステーション2及び下流側ステーション3と、ワークWを移載するために各ステーション2,3前に停車する台車4と、二つのステーション2,3を結ぶように延び台車4を誘導するレール5とを備えている。尚、図6では、上流側ステーション2前に停車した状態の台車4と、下流側ステーション3前に停車した状態の台車4とを、より明瞭に示すために共に実線で描いているが、本実施形態で用いる台車4は一台のみである。
【0022】
ステーション2,3は、搬送ラインの途中に作業者の通行用スペースを確保するために引き離されて設けられたコンベア装置からなり、それぞれが備える駆動コンベア1は駆動モータ1aによって駆動する。
【0023】
台車4は、レール5に沿って両ステーション2,3間を往復移動し、上流側ステーション2からワークWが搬入され、下流側ステーション3にワークWを搬出する、という作動を繰り返す。図1(A)、図2等において、44は台車4に設けられた車輪である。
【0024】
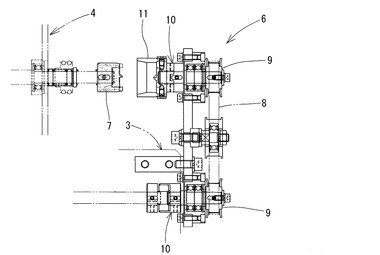
そして、台車4は、各ステーション2,3と台車4との間でワークWが移載されるときに各ステーション2,3の駆動コンベア1の回転運動エネルギーを備蓄し、備蓄したエネルギーは、移載完了後に、両ステーション2,3間を移動する台車4の駆動エネルギーとして利用するように構成されている。すなわち、図1〜図2、図6、図9〜図12に示すように、各ステーション2,3には、駆動コンベア1が有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車4には、両ステーション2,3の出力部6に着脱自在に接続される入力部7が両側面に設けられている。
【0025】
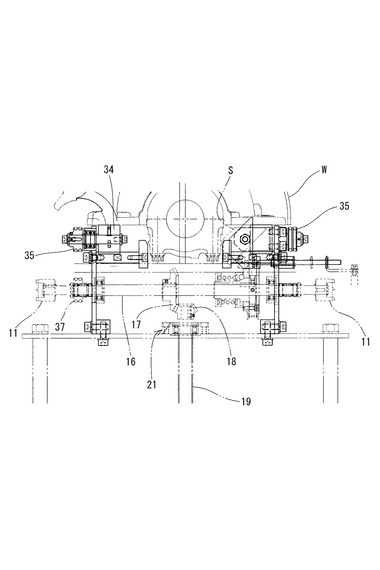
ここで、出力部6は、図9〜図12に示すように、ベルト8が掛けられた一対のプーリー9を介して接続され、駆動モータ1aによる駆動コンベア1の駆動の際に連動して回転する二つのカップリング10と、二つのカップリング10の一方に連設されたジョイント受け部11とを備えている。これに対して、入力部7は、ジョイント受け部11に差し込まれるとジョイント受け部11に連動して回転するジョイント差込み部として構成されている。
【0026】
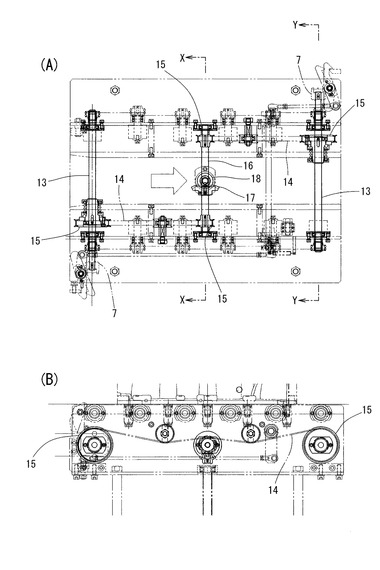
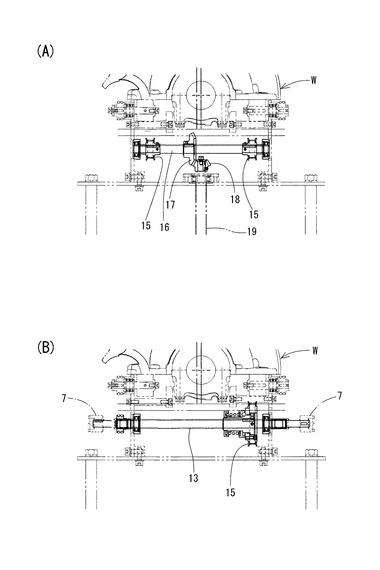
そして、台車4には、各入力部7から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、その位置エネルギーを回転体12の回転運動エネルギーとして出力するエネルギー備蓄機構が設けられている。すなわち、このエネルギー備蓄機構は、図2、図3(A)及び(B)、図13〜図15、図16(B)に示すように、入力部7を一端側に有し入力部7とともに回転する二つの入力軸部13と、歯付きベルト14が掛けられた一対の歯付きプーリー15を介して各入力軸部13とともに回転するように構成された中継軸部16と、この中継軸部16に設けられた駆動傘歯車17と、この駆動傘歯車17に噛合う従動傘歯車18を有し中継軸部16の下方において上下方向に延びるボールねじ軸19と、このボールねじ軸19に螺合し、ボールねじ軸19が一方向及び逆方向の軸回りに回転するのに伴ってボールねじ軸19に沿って昇降するようにガイドされた昇降部材20と、ボールねじ軸19と連動して回転する回転体12とを備えている。
【0027】
斯かるエネルギー備蓄機構では、何れか一方の入力部7から入力された回転運動エネルギーは、入力軸部13、歯付きベルト14及び一対の歯付きプーリー15、中継軸部16、傘歯車17,18を介して、ボールねじ軸19を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸19の一方向の軸回りの回転に伴って上昇する昇降部材20の位置エネルギーとして備蓄されることになる(図2、図8(A)及び(B)、図15(B)、図16(B)参照)。
【0028】
そして、備蓄された昇降部材20の位置エネルギーは、昇降部材20が自重により下降するのに伴ってボールねじ軸19を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、ボールねじ軸19と連動するように構成された回転体12の回転運動エネルギーに変換される。
【0029】
さらに、この回転体12の回転運動エネルギーが、台車4が両ステーション2,3間を移動するための運動エネルギーに変換されるように、回転体12はレール5に係合する。すなわち、レール5は対向配置された一対の係合レール(本例ではラック)5aからなり(図1(B)参照)、回転体12は各係合レール5aに噛合可能な歯車からなる(図2参照)。
【0030】
ここで、図15(B)、図16(B)に示すように、ボールねじ軸19は台車4の上部及び下部に設けられたボールねじナット21(図17も参照)に螺合している。また、図8(A)及び(B)、図15(B)に示すように、昇降部材20は、ボールねじ軸19に平行に延びるガイド棒22によってガイドされつつ昇降し、昇降部材20と台車4の下部とはエアシリンダ23によって連結されている。そして、このエアシリンダ23のエアの力により、台車4は各ステーション2,3前に滑らかに停車することになる。
【0031】
本実施形態では、一方向のみにしか回転しない回転体12を用いて台車4が両ステーション2,3間を往復移動することができるように、台車4が各ステーション2,3前に停車するときに、一対の係合レール5aの一方に係合する状態の回転体12を一対の係合レール5aの他方に係合する状態に切り換え、走行方向を反転させるための切換え機構を台車4に設けてある。
【0032】
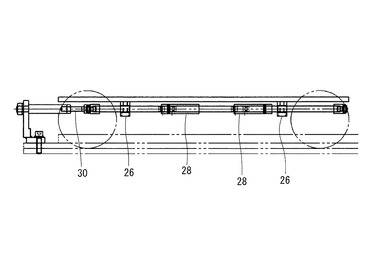
この切換え機構は、図4(A)及び(B)、図5、図16(A)及び(B)、図18に示すように、ボールねじ軸19の下端に連設され、一対の係合レール5a内に位置する動力伝達歯車24と、ボールねじ軸19の軸回りに回動する回動アーム25と、この回動アーム25に回転可能に保持され、一対の係合レール5a内に位置しつつ動力伝達歯車24と噛合う回転体12と、台車4の下部に固定されたガイド保持部26と、台車4の走行方向にスライド可能な状態でガイド保持部26に保持されたスライド体27と、このスライド体27に連設され、スライド体27の一方向及び他方向のスライドに伴って回動アーム25の一端側及び他端側に当接し、回動アーム25を順方向及び逆方向に回動させ、回転体12が一対の係合レール5aの一方または他方に噛合う状態を保持する切換えアーム28とを備えている。
【0033】
また、両ステーション2,3には、図4(A)、図7、図16(A)に示すように、台車4を停車させるストッパ29と、台車4の停車時にスライド体27に当接してスライド体27をスライドさせる切換え棒30とが設けられている。
【0034】
従って、台車4が上流側ステーション2から下流側ステーション3に向かって前進移動しているときは、回転体12は一対の係合レール5aの一方に噛合った状態になっている。そして、台車4が下流側ステーション3前に停車したときに、下流側ステーション3に設けられた切換え棒30によりスライド体27が押されてスライドし、このスライド体27に連設された切換えアーム28が回動アーム25を回動させ、この回動アーム25に保持された回転体12が一対の係合レール5aの他方に噛合った状態に切り換わり、台車4の走行方向が反転し、回転体12の回転に伴って台車4は上流側ステーション2に向かって後退移動するようになる。また、台車4が上流側ステーション2前に停車したときには、上流側ステーション2に設けられた切換え棒30によりスライド体27が押されてスライドし、このスライド体27に連設された切換えアーム28が回動アーム25を回動させ、この回動アーム25に保持された回転体12が一対の係合レール5aの一方に噛合った状態に切り換わり、台車4の走行方向が反転し、回転体12の回転に伴って台車4は下流側ステーション3に向かって前進移動するようになる。
【0035】
ここで、回転体12は、一対の係合レール5aの両方に同時に噛合う状態になることはなく、常に一対の係合レール5aの片方のみにしか噛合わないので、台車4が走行中に揺れ、回転体12が係合レール5aから外れて両者12、5aの噛合が解除されてしまうと、台車4の走行が不可能となる。そこで、このような事態が起こらないように、台車4の前後にカムフォロア31を設けるとともに、各カムフォロア31をガイドするガイドレール32を一対の係合レール5aの下方に設け、走行中の台車4の揺れを防止するように構成してある(図4(A)、図5、図16(A)及び(B)参照)。
【0036】
本実施形態ではまた、台車4に、入力部7から入力された回転運動エネルギーによって駆動する従動コンベア33が設けられている。すなわち、従動コンベア33は、図3(A)及び(B)、図19(A)及び(B)、図20に示すように、ワークWを搬送するために二列に並ぶ複数のローラ34と、各ローラ34の外側に連設され二列に並ぶ丸ベルト用プーリー(プーリーの一例)35と、各列の丸ベルト用プーリー35に掛けられる丸ベルト(ベルトの一例)36とを備えている。そして、図3(A)及び(B)に示すように、各列の端に位置する丸ベルト用プーリー35は、丸ベルト36を介して、入力軸部13に同軸状に連設された丸ベルト用プーリー37と連動するように構成されている。
【0037】
次に、本実施形態の搬送システムの一連の作動について説明する。
【0038】
(1)まず、台車4が上流側ステーション2前に停車しているとき(図1(A)及び(B)、図8(A)参照)には、上流側ステーション2の出力部6に入力部7が接続された状態となっており(図10(A)参照)、上流側ステーション2の駆動コンベア1がワークWを台車4に搬入するべく駆動すると、駆動コンベア1の回転運動エネルギーは出力部6から台車4の入力部7に伝達されることになる。
【0039】
そして、入力部7から入力された回転運動エネルギーの一部は従動コンベア33(図3参照)の駆動エネルギーとして消費され、上流側ステーション2の駆動コンベア1から台車4の従動コンベア33へのワークWの搬入がスムーズに行われる。このとき、ワークWが従動コンベア33を越えて落下してしまうことは、従動コンベア33の下流部に設けられた落下防止ストッパS(図20参照)により防止される。
【0040】
また、ワークWの搬入中に、入力部7から入力される回転運動エネルギーの他の一部は、エネルギー備蓄機構により昇降部材20の位置エネルギーに変換されて備蓄されるのであり、昇降部材20は例えば上昇端にまで上昇する(図2、図7、図8(A)、図15(B)、図16(B)参照)。
【0041】
(2)ワークWの搬入が完了すると、台車4の上部に設けられたリンク機構38(図19(A)及び(B)参照)がワークWの載置(重量の上昇)によって作動し、このリンク機構38に連結された台車4の係合部39と、上流側ステーション2に設けられた被係合部40との係合が解除される(図19(A)参照)。すなわち、ワークWの搬入中は、係合部39と被係合部40とは係合した状態となっている。尚、リンク機構38の構成は公知のものを採用可能であり、その詳細については説明を省略する。
【0042】
また、ワークWの搬入が完了すると、出力部6に対する入力部7の接続と、被係合部40に対する係合部39の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持していたストッパ(図示していない)による台車4の保持も解除される。従って、昇降部材20が下降を開始するのに伴い、一対の係合レール5aの一方と噛合う回転体12が回転し始めることにより、台車4は下流側ステーション3に向かって走行する状態になる(図2参照)。なお、このストッパは、例えば上流側ステーション2を制御する制御部により制御され、台車4の保持操作及びその解除操作が行われる。
【0043】
(3)台車4が下流側ステーション3に近づき、昇降部材20が下降端付近にまで至ると、エアシリンダ23(図15(B)参照)の働きにより、台車4の速度は低下し、やがて台車4は滑らかに下流側ステーション3に停車する。
【0044】
このとき、図19(A)に示すように、台車4に設けられた係合部41が下流側ステーション3に設けられた被係合部42に係合し、台車4の移動が不可能な状態になる。また、下流側ステーション3の出力部6に台車4の入力部7が接続される。さらに、図示していないストッパが、出力部6に対する入力部7の接続と、被係合部42に対する係合部41の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持する。
【0045】
また、このとき、台車4の切換え機構のスライド体27に下流側ステーション3の切換え棒30が当接し、回転体12は一対の係合レール5aの他方に噛合う状態となるように切り換わり、台車4の走行方向は反転される。
【0046】
(4)台車4が下流側ステーション3前に停車しているとき(図1(A)及び(B)、図8(B)参照)には、下流側ステーション3の出力部6に入力部7が接続された状態となっており(図12(A)参照)、下流側ステーション3の駆動コンベア1がワークWを台車4から搬出するべく駆動すると、駆動コンベア1の回転運動エネルギーは出力部6から台車4の入力部7に伝達されることになる。
【0047】
そして、入力部7から入力された回転運動エネルギーの一部は従動コンベア33(図3参照)の駆動エネルギーとして消費され、台車4の従動コンベア33から下流側ステーション3の駆動コンベア1へのワークWの搬出がスムーズに行われる。尚、従動コンベア33の下流部に設けられた落下防止ストッパS(図20参照)は、台車4が下流側ステーション3前に停車した時点で、下流側ステーション3の適宜の箇所に当たって持ち上がり、ワークWが従動コンベア33の下流側に移動するのを許容する状態となっている。そして、この落下防止ストッパSは、台車4が下流側ステーション3から離れると、元の状態に戻る。
【0048】
また、ワークWの搬出中に、昇降部材20は例えば上昇端にまで上昇するのであり、この点は、台車4が上流側ステーション2前に停車しているときと同様である。
【0049】
(5)ワークWの搬出が完了すると、台車4の上部に設けられたリンク機構43(図19(A)参照)がワークWの除去(重量の低下)によって作動し、このリンク機構43に連結された台車4の係合部41と、下流側ステーション3の被係合部41との係合が解除される(図19(A)参照)。尚、リンク機構43の構成は公知のものを採用可能であり、その詳細については説明を省略する。
【0050】
また、ワークWの搬入が完了すると、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持していたストッパ(図示していない)による台車4の保持も解除される。従って、台車4は、昇降部材20の下降に伴って上流側ステーション2に向けて移動する。
【0051】
(6)台車4が上流側ステーション2に近づき、昇降部材20が下降端付近にまで至ると、エアシリンダ23(図15(B)参照)の働きにより、台車4の速度は低下し、やがて台車4は滑らかに上流側ステーション2に停車する。
【0052】
このとき、図19(A)に示すように、台車4に設けられた係合部39が上流側ステーション3の被係合部40に係合し、台車4の移動が不可能な状態になる。また、上流側ステーション2の出力部6に台車4の入力部7が接続される。さらに、図示していないストッパが、出力部6に対する入力部7の接続と、被係合部40に対する係合部39の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持する。
【0053】
また、このとき、台車4の切換え機構のスライド体27に上流側ステーション2の切換え棒30が当接し、回転体12は一対の係合レール5aの一方に噛合う状態となるように切り換わり、台車4の走行方向は反転される。これにより、上記(1)の状態となる。
【0054】
本実施形態の搬送システムは、各ステーション2,3の駆動コンベア1から出力部6を介して台車4にエネルギーを補給することができるものであり、台車4に対する内部電源の搭載を不要としてイニシャルコストを低減することができ、また、外部から台車4への電力供給も不要であるので、弊害の発生を伴う電力ケーブルの接続を台車4に行う必要もない。さらに、台車4の移動の前後でワークWの保持高さを一定に保つことができるので、ワークWの台車4への搬入高さと台車4からの搬出高さとを一致させるために、リフター装置等の他の装置を用いる必要もない。
【0055】
上記特許文献1に記載された軌道台車では、ワークの荷重がワークの搬送に消費されるエネルギーに変換されるものであるため、ワークの荷重によっては搬送距離が伸びず、搬送が途中で終了してしまう懸念があるが、本実施形態の搬送システムでは、各ステーション2,3前で常に十分な一定量のエネルギーを台車4に供給可能であるので、ワークWの確実な搬送を実現することができる。また、各ステーション2,3前での台車4に対するエネルギーの備蓄量を増減すれば、搬送距離も自在に変更することができる。
【0056】
本実施形態の搬送システムでは、台車4を移動させるに際して、回転体(歯車)12とレール(ラック)5との噛合いに加えて、ガイドレール32によるカムフォロア31のガイドを採用したので、台車4に安定した走行を行わせることができる上、台車4に直線走行だけでなく曲線走行を行わせることも可能である。すなわち、台車4に曲線走行を行わせたい場合、レール5及びガイドレール32を曲線状に延ばせばよい。
【0057】
なお、本発明は、上記の実施の形態に何ら限定されず、本発明の要旨を逸脱しない範囲において種々に変形して実施し得ることは勿論である。例えば、以下のような変形例を挙げることができる。
【0058】
本実施形態の搬送システムでは、二つのステーション2,3は、ワークWの搬送方向に離れているのみならず、この搬送方向と直交する水平方向にも離れているが、ワークWの搬送方向のみに離れた二つのステーション間のワークWの移送に台車4を用いるようにすることもでき、さらには、台車4は二つのステーション間を往復移動するものに限らず、例えば、台車4が複数のステーションにわたってループ状に移動するように構成されていてもよい。このように台車4がループ状に周回走行し、走行方向の反転が不要な場合は、上記切換え機構を省略することができると共に、一対の係合レール5aも何れか片方のみ設ければ足りる。
【0059】
本実施形態の搬送システムでは、レール5をラックとし、回転体12をこのラックと噛み合う歯車としているが、これに限らず、例えば、レール5を歯付きベルトとし、回転体12をこれと噛み合う歯付きプーリーとしてもよい。
【0060】
本実施形態の搬送システムでは、回転体12と動力伝達歯車24とを直接噛み合わせているが、例えば両者12、24の間にギア群を設けて、ギア比を適宜に変更するようにしてもよい。
【0061】
本実施形態の搬送システムでは、台車4を各ステーション2,3前に滑らかに停車させるためにエアシリンダ23を設けているが、エアシリンダ23の代わりに、例えば弾性部材を設けて同様の機能を発揮させるようにしてもよい。
【0062】
本実施形態の搬送システムでは、台車4が各ステーション2,3前に停車したときに回転体12がレール5に係合しないように台車4を少し持ち上げて保持するストッパは、各ステーション2,3を制御する制御部により制御され、台車4の保持操作及びその解除操作を行うようにしてあるが、これに限らず、例えば、台車4が各ステーション2,3に停車したときに台車4の一部がストッパに当接する等してストッパがこの停車に機械的に連動して台車4を保持し、その後、昇降部材20が上昇して所定高さに到達したときに昇降部材20の一部がストッパに当接する等してストッパがこの到達に機械的に連動して台車4の保持を解除する、というように構成されていてもよい。
【0063】
なお、上記変形例どうしを適宜組み合わせてもよいことはいうまでもない。
【符号の説明】
【0064】
1 駆動コンベア
2 ステーション(上流側ステーション)
3 ステーション(下流側ステーション)
4 台車
5 レール
5a 係合レール
6 出力部
7 入力部
12 回転体
19 ボールねじ軸
20 昇降部材
W ワーク
【技術分野】
【0001】
この発明は、例えば、ワーク等の搬送物の搬送に用いられる搬送システムに関する。
【背景技術】
【0002】
コンベアによって構成された搬送ラインにワークを流してワークに対する加工等を順次行う各種組立工場等では、多くの場合、作業者が搬送ラインを挟む二つの通路の一方から他方に移動するためには、搬送ラインの端まで一旦回り込まなければならず、搬送ラインを横切ることはできない。しかし、例えば、搬送ラインが長く延び、斯かる搬送ラインを回り込んでの移動を頻繁に行う必要がある場合には、その動線の長さは作業性等の向上を図る上で看過することのできない問題となる。
【0003】
そこで、図21(A)及び(B)に示すように、搬送ラインの途中に、それぞれコンベア51を有する上流側ステーション52及び下流側ステーション53を設け、両ステーション52,53を引き離して作業者の通行用スペースを確保すると共に、両ステーション52,53間を往復移動してワークWを移送する無人車(AGV)54を設けることが考えられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4419659号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、この方法では、無人車54が駆動モータ用のバッテリー(図示していない)を具備した内部電源方式(自走式)を採用したものであると、バッテリーの搭載に伴う重量化に対応するために高出力の駆動モータ(図示していない)が必要となる。また、作業者が各ステーション52,53前のスペース内に立ち止まって重量化した無人車54と衝突したりしないように、立ち入りエリアを制限する安全柵55や立ち入りを感知して無人車54の緊急停止に繋げる感知センサー(光電管等)56をステーション52,53毎に設置する必要もある。さらに、無人車に備え付けた制御機器(図示していない)に、緊急停止等をも含めた無人車の往復移動の制御を行わせる場合、その制御内容は非常に複雑なものとなる。そして、これらの点は全てイニシャルコストの上昇に結び付く。
【0006】
そこで、両ステーション52,53間のワークWの移送を、内部電源方式の無人車54に担わせる代わりに、外部電源方式の軌道(有軌道)台車(図示していない)に担わせることが考えられる。この方法によれば、台車が両ステーション52,53間を往復移動する際、台車に接続された電力ケーブルを介して外部から台車の駆動モータへと電力が供給されることになる。従って、台車へのバッテリーの搭載を省略して軽量化を図ることができ、さらには、低推力のモータを駆動モータとして使用することにより、安全柵55や感知センサー56の設置を不要とすることができ、制御内容の簡易化も図れる。しかし、台車に繋がる電力ケーブルが、台車の移動範囲や移動ルートを制限したり、搬送ラインを横切る作業者にとって邪魔になったりする恐れがある。
【0007】
ここで、特許文献1には、軌道台車に駆動モータを使用せず、台車部に載置されるワークの荷重を利用して台車部を往復移動させる技術が開示されており、この技術によれば、台車部の駆動専用の内部電源は勿論、外部電源からの電力を供給するための電力ケーブルも不要となる。
【0008】
しかし、この技術を用いる場合、台車部に載置されたワークは台車部と共に往路を進むに連れて下降するため、移動開始位置におけるワークの高さよりも移動終了位置におけるワークの高さの方がそれだけ低くなり、搬送距離を伸ばすとこの下降幅の大きさは顕著となって、台車部へのワークの搬入高さと台車部からのワークの搬出高さとを一致させるには、ワークを何れかの時点で上昇させるリフター装置の設置が必須になり、この設置はイニシャルコストを引き上げることになる。しかも、台車部の移動距離はワークの重量に依存して変わるので、多品種のワークが流れる混合ラインに、ワークの荷重を利用するこの技術を適用することは困難となる。
【0009】
本発明は上述の事柄に留意してなされたもので、その目的は、イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムを提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係る搬送システムは、搬送物を搬送するための駆動コンベアを有する複数のステーションと、搬送物を移載するために各ステーション前に停車する台車と、複数の前記ステーションを結ぶように延びるレールとを備えた搬送システムであって、前記ステーションに、前記駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部が設けられ、前記台車に、前記出力部に着脱自在に接続される入力部と、該入力部から入力された前記回転運動エネルギーを位置エネルギーに変換して備蓄した後、該位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、前記回転体の回転運動エネルギーが、前記台車が複数の前記ステーション間を移動するための運動エネルギーに変換されるように、前記回転体は前記レールに係合する(請求項1)。
【0011】
上記搬送システムにおいて、前記エネルギー備蓄機構は、上下方向に延びるボールねじ軸と、該ボールねじ軸に螺合し、該ボールねじ軸が一方向及び逆方向の軸回りに回転するのに伴って該ボールねじ軸に沿って昇降するようにガイドされた昇降部材と、前記ボールねじ軸と連動して回転する前記回転体とを備え、前記入力部から入力された前記回転運動エネルギーは、前記ボールねじ軸を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸の一方向の軸回りの回転に伴って上昇する前記昇降部材の位置エネルギーとして備蓄され、備蓄された前記位置エネルギーは、前記昇降部材が自重により下降するのに伴って前記ボールねじ軸を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、該ボールねじ軸と連動するように構成された前記回転体の回転運動エネルギーに変換されてもよい(請求項2)。
【0012】
上記搬送システムにおいて、前記台車は二つの前記ステーション間を往復移動するように構成されていると共に、該二つのステーションを結ぶ前記レールは対向配置された一対の係合レールからなり、前記台車に、該台車が前記二つのステーション前に停車するときに、前記一対の係合レールの一方に係合する状態の前記回転体を前記一対の係合レールの他方に係合する状態に切り換えるための切換え機構が設けられていてもよい(請求項3)。
【0013】
上記搬送システムにおいて、前記台車に、前記入力部から入力された前記回転運動エネルギーによって駆動する従動コンベアが設けられていてもよい(請求項4)。
【発明の効果】
【0014】
本願発明では、イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムが得られる。
【0015】
すなわち、本願の各請求項に係る発明の搬送システムは、各ステーションの駆動コンベアから出力部を介して台車にエネルギーを補給することができるものであり、台車に対する内部電源の搭載を不要としてイニシャルコストを低減することができ、また、外部から台車への電力供給も不要であるので、弊害の発生を伴う電力ケーブルの接続を台車に行う必要もない。さらに、台車の移動の前後で搬送物の保持高さを一定に保つことができるので、搬送物の台車への搬入高さと台車からの搬出高さとを一致させるために、リフター装置等の他の装置を用いる必要もない。
【0016】
上記特許文献1に記載された軌道台車では、搬送物の荷重が搬送物の搬送に消費されるエネルギーに変換されるものであるため、搬送物の荷重によっては搬送距離が伸びず、搬送が途中で終了してしまう懸念があるが、本発明の搬送システムでは、各ステーション前で常に十分な一定量のエネルギーを台車に供給可能であるので、搬送物の確実な搬送を実現することができる。また、各ステーション前での台車に対するエネルギーの備蓄量を増減すれば、搬送距離も自在に変更することができる。
【0017】
請求項2、3に係る発明の搬送システムでは、台車を移動させる構成のシンプル化を図ってイニシャルコストのさらなる低減に寄与することができる。
【0018】
請求項4に係る発明の搬送システムでは、台車に従動コンベアを設けることにより、各ステーションと台車との間の搬送物の移送をスムーズに行うことができる。
【図面の簡単な説明】
【0019】
【図1】(A)及び(B)は、本発明の一実施の形態に係る搬送システムの構成を概略的に示す平面図及び説明図である。
【図2】前記搬送システムの台車の構成を概略的に示す説明図である。
【図3】(A)は前記台車の構成を概略的に示す平面図、(B)は前記台車の上部の構成を概略的に示す正面図である。
【図4】(A)及び(B)は、前記台車の切換え機構の構成を概略的に示す平面図及び説明図である。
【図5】前記切換え機構の構成を概略的に示す正面図である。
【図6】前記搬送システムの平面図である。
【図7】前記台車の作動を概略的に示す正面図である。
【図8】(A)は搬入時における前記台車の側面図、(B)は搬出時における前記台車の側面図である。
【図9】上流側ステーションの出力部と前記台車の入力部の横断面図である。
【図10】(A)及び(B)は、前記入力部が接続された状態の前記上流側ステーションの出力部の横断面図及び側面図である。
【図11】下流側ステーションの出力部と前記台車の入力部の横断面図である。
【図12】(A)及び(B)は、前記入力部が接続された状態の前記下流側ステーションの出力部の横断面図及び側面図である。
【図13】(A)及び(B)は、前記台車のエネルギー備蓄機構の透視平面図及び正面図である。
【図14】(A)及び(B)は、図13(A)におけるX―X線断面図及びY−Y線断面図である。
【図15】(A)は前記台車の下部の平面図、(B)は(A)におけるX―X線断面図である。
【図16】(A)は前記台車の下部の透視平面図、(B)は(A)におけるX―X線断面図である。
【図17】前記台車のボールねじの要部の横断面図である。
【図18】前記切換え機構の正面図である。
【図19】(A)及び(B)は、前記台車の従動コンベアの透視平面図及び正面図である。
【図20】前記従動コンベアの縦断面図である。
【図21】(A)及び(B)は、従来の搬送システムの構成を概略的に示す平面図及び正面図である。
【発明を実施するための形態】
【0020】
本発明の実施の形態について図面を参照しながら以下に説明する。
【0021】
本実施の形態に係る搬送システムは、図1(A)及び(B)、図6に示すように、ワークW(搬送物の一例)を搬送するための駆動コンベア1をそれぞれ有する上流側ステーション2及び下流側ステーション3と、ワークWを移載するために各ステーション2,3前に停車する台車4と、二つのステーション2,3を結ぶように延び台車4を誘導するレール5とを備えている。尚、図6では、上流側ステーション2前に停車した状態の台車4と、下流側ステーション3前に停車した状態の台車4とを、より明瞭に示すために共に実線で描いているが、本実施形態で用いる台車4は一台のみである。
【0022】
ステーション2,3は、搬送ラインの途中に作業者の通行用スペースを確保するために引き離されて設けられたコンベア装置からなり、それぞれが備える駆動コンベア1は駆動モータ1aによって駆動する。
【0023】
台車4は、レール5に沿って両ステーション2,3間を往復移動し、上流側ステーション2からワークWが搬入され、下流側ステーション3にワークWを搬出する、という作動を繰り返す。図1(A)、図2等において、44は台車4に設けられた車輪である。
【0024】
そして、台車4は、各ステーション2,3と台車4との間でワークWが移載されるときに各ステーション2,3の駆動コンベア1の回転運動エネルギーを備蓄し、備蓄したエネルギーは、移載完了後に、両ステーション2,3間を移動する台車4の駆動エネルギーとして利用するように構成されている。すなわち、図1〜図2、図6、図9〜図12に示すように、各ステーション2,3には、駆動コンベア1が有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車4には、両ステーション2,3の出力部6に着脱自在に接続される入力部7が両側面に設けられている。
【0025】
ここで、出力部6は、図9〜図12に示すように、ベルト8が掛けられた一対のプーリー9を介して接続され、駆動モータ1aによる駆動コンベア1の駆動の際に連動して回転する二つのカップリング10と、二つのカップリング10の一方に連設されたジョイント受け部11とを備えている。これに対して、入力部7は、ジョイント受け部11に差し込まれるとジョイント受け部11に連動して回転するジョイント差込み部として構成されている。
【0026】
そして、台車4には、各入力部7から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、その位置エネルギーを回転体12の回転運動エネルギーとして出力するエネルギー備蓄機構が設けられている。すなわち、このエネルギー備蓄機構は、図2、図3(A)及び(B)、図13〜図15、図16(B)に示すように、入力部7を一端側に有し入力部7とともに回転する二つの入力軸部13と、歯付きベルト14が掛けられた一対の歯付きプーリー15を介して各入力軸部13とともに回転するように構成された中継軸部16と、この中継軸部16に設けられた駆動傘歯車17と、この駆動傘歯車17に噛合う従動傘歯車18を有し中継軸部16の下方において上下方向に延びるボールねじ軸19と、このボールねじ軸19に螺合し、ボールねじ軸19が一方向及び逆方向の軸回りに回転するのに伴ってボールねじ軸19に沿って昇降するようにガイドされた昇降部材20と、ボールねじ軸19と連動して回転する回転体12とを備えている。
【0027】
斯かるエネルギー備蓄機構では、何れか一方の入力部7から入力された回転運動エネルギーは、入力軸部13、歯付きベルト14及び一対の歯付きプーリー15、中継軸部16、傘歯車17,18を介して、ボールねじ軸19を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸19の一方向の軸回りの回転に伴って上昇する昇降部材20の位置エネルギーとして備蓄されることになる(図2、図8(A)及び(B)、図15(B)、図16(B)参照)。
【0028】
そして、備蓄された昇降部材20の位置エネルギーは、昇降部材20が自重により下降するのに伴ってボールねじ軸19を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、ボールねじ軸19と連動するように構成された回転体12の回転運動エネルギーに変換される。
【0029】
さらに、この回転体12の回転運動エネルギーが、台車4が両ステーション2,3間を移動するための運動エネルギーに変換されるように、回転体12はレール5に係合する。すなわち、レール5は対向配置された一対の係合レール(本例ではラック)5aからなり(図1(B)参照)、回転体12は各係合レール5aに噛合可能な歯車からなる(図2参照)。
【0030】
ここで、図15(B)、図16(B)に示すように、ボールねじ軸19は台車4の上部及び下部に設けられたボールねじナット21(図17も参照)に螺合している。また、図8(A)及び(B)、図15(B)に示すように、昇降部材20は、ボールねじ軸19に平行に延びるガイド棒22によってガイドされつつ昇降し、昇降部材20と台車4の下部とはエアシリンダ23によって連結されている。そして、このエアシリンダ23のエアの力により、台車4は各ステーション2,3前に滑らかに停車することになる。
【0031】
本実施形態では、一方向のみにしか回転しない回転体12を用いて台車4が両ステーション2,3間を往復移動することができるように、台車4が各ステーション2,3前に停車するときに、一対の係合レール5aの一方に係合する状態の回転体12を一対の係合レール5aの他方に係合する状態に切り換え、走行方向を反転させるための切換え機構を台車4に設けてある。
【0032】
この切換え機構は、図4(A)及び(B)、図5、図16(A)及び(B)、図18に示すように、ボールねじ軸19の下端に連設され、一対の係合レール5a内に位置する動力伝達歯車24と、ボールねじ軸19の軸回りに回動する回動アーム25と、この回動アーム25に回転可能に保持され、一対の係合レール5a内に位置しつつ動力伝達歯車24と噛合う回転体12と、台車4の下部に固定されたガイド保持部26と、台車4の走行方向にスライド可能な状態でガイド保持部26に保持されたスライド体27と、このスライド体27に連設され、スライド体27の一方向及び他方向のスライドに伴って回動アーム25の一端側及び他端側に当接し、回動アーム25を順方向及び逆方向に回動させ、回転体12が一対の係合レール5aの一方または他方に噛合う状態を保持する切換えアーム28とを備えている。
【0033】
また、両ステーション2,3には、図4(A)、図7、図16(A)に示すように、台車4を停車させるストッパ29と、台車4の停車時にスライド体27に当接してスライド体27をスライドさせる切換え棒30とが設けられている。
【0034】
従って、台車4が上流側ステーション2から下流側ステーション3に向かって前進移動しているときは、回転体12は一対の係合レール5aの一方に噛合った状態になっている。そして、台車4が下流側ステーション3前に停車したときに、下流側ステーション3に設けられた切換え棒30によりスライド体27が押されてスライドし、このスライド体27に連設された切換えアーム28が回動アーム25を回動させ、この回動アーム25に保持された回転体12が一対の係合レール5aの他方に噛合った状態に切り換わり、台車4の走行方向が反転し、回転体12の回転に伴って台車4は上流側ステーション2に向かって後退移動するようになる。また、台車4が上流側ステーション2前に停車したときには、上流側ステーション2に設けられた切換え棒30によりスライド体27が押されてスライドし、このスライド体27に連設された切換えアーム28が回動アーム25を回動させ、この回動アーム25に保持された回転体12が一対の係合レール5aの一方に噛合った状態に切り換わり、台車4の走行方向が反転し、回転体12の回転に伴って台車4は下流側ステーション3に向かって前進移動するようになる。
【0035】
ここで、回転体12は、一対の係合レール5aの両方に同時に噛合う状態になることはなく、常に一対の係合レール5aの片方のみにしか噛合わないので、台車4が走行中に揺れ、回転体12が係合レール5aから外れて両者12、5aの噛合が解除されてしまうと、台車4の走行が不可能となる。そこで、このような事態が起こらないように、台車4の前後にカムフォロア31を設けるとともに、各カムフォロア31をガイドするガイドレール32を一対の係合レール5aの下方に設け、走行中の台車4の揺れを防止するように構成してある(図4(A)、図5、図16(A)及び(B)参照)。
【0036】
本実施形態ではまた、台車4に、入力部7から入力された回転運動エネルギーによって駆動する従動コンベア33が設けられている。すなわち、従動コンベア33は、図3(A)及び(B)、図19(A)及び(B)、図20に示すように、ワークWを搬送するために二列に並ぶ複数のローラ34と、各ローラ34の外側に連設され二列に並ぶ丸ベルト用プーリー(プーリーの一例)35と、各列の丸ベルト用プーリー35に掛けられる丸ベルト(ベルトの一例)36とを備えている。そして、図3(A)及び(B)に示すように、各列の端に位置する丸ベルト用プーリー35は、丸ベルト36を介して、入力軸部13に同軸状に連設された丸ベルト用プーリー37と連動するように構成されている。
【0037】
次に、本実施形態の搬送システムの一連の作動について説明する。
【0038】
(1)まず、台車4が上流側ステーション2前に停車しているとき(図1(A)及び(B)、図8(A)参照)には、上流側ステーション2の出力部6に入力部7が接続された状態となっており(図10(A)参照)、上流側ステーション2の駆動コンベア1がワークWを台車4に搬入するべく駆動すると、駆動コンベア1の回転運動エネルギーは出力部6から台車4の入力部7に伝達されることになる。
【0039】
そして、入力部7から入力された回転運動エネルギーの一部は従動コンベア33(図3参照)の駆動エネルギーとして消費され、上流側ステーション2の駆動コンベア1から台車4の従動コンベア33へのワークWの搬入がスムーズに行われる。このとき、ワークWが従動コンベア33を越えて落下してしまうことは、従動コンベア33の下流部に設けられた落下防止ストッパS(図20参照)により防止される。
【0040】
また、ワークWの搬入中に、入力部7から入力される回転運動エネルギーの他の一部は、エネルギー備蓄機構により昇降部材20の位置エネルギーに変換されて備蓄されるのであり、昇降部材20は例えば上昇端にまで上昇する(図2、図7、図8(A)、図15(B)、図16(B)参照)。
【0041】
(2)ワークWの搬入が完了すると、台車4の上部に設けられたリンク機構38(図19(A)及び(B)参照)がワークWの載置(重量の上昇)によって作動し、このリンク機構38に連結された台車4の係合部39と、上流側ステーション2に設けられた被係合部40との係合が解除される(図19(A)参照)。すなわち、ワークWの搬入中は、係合部39と被係合部40とは係合した状態となっている。尚、リンク機構38の構成は公知のものを採用可能であり、その詳細については説明を省略する。
【0042】
また、ワークWの搬入が完了すると、出力部6に対する入力部7の接続と、被係合部40に対する係合部39の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持していたストッパ(図示していない)による台車4の保持も解除される。従って、昇降部材20が下降を開始するのに伴い、一対の係合レール5aの一方と噛合う回転体12が回転し始めることにより、台車4は下流側ステーション3に向かって走行する状態になる(図2参照)。なお、このストッパは、例えば上流側ステーション2を制御する制御部により制御され、台車4の保持操作及びその解除操作が行われる。
【0043】
(3)台車4が下流側ステーション3に近づき、昇降部材20が下降端付近にまで至ると、エアシリンダ23(図15(B)参照)の働きにより、台車4の速度は低下し、やがて台車4は滑らかに下流側ステーション3に停車する。
【0044】
このとき、図19(A)に示すように、台車4に設けられた係合部41が下流側ステーション3に設けられた被係合部42に係合し、台車4の移動が不可能な状態になる。また、下流側ステーション3の出力部6に台車4の入力部7が接続される。さらに、図示していないストッパが、出力部6に対する入力部7の接続と、被係合部42に対する係合部41の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持する。
【0045】
また、このとき、台車4の切換え機構のスライド体27に下流側ステーション3の切換え棒30が当接し、回転体12は一対の係合レール5aの他方に噛合う状態となるように切り換わり、台車4の走行方向は反転される。
【0046】
(4)台車4が下流側ステーション3前に停車しているとき(図1(A)及び(B)、図8(B)参照)には、下流側ステーション3の出力部6に入力部7が接続された状態となっており(図12(A)参照)、下流側ステーション3の駆動コンベア1がワークWを台車4から搬出するべく駆動すると、駆動コンベア1の回転運動エネルギーは出力部6から台車4の入力部7に伝達されることになる。
【0047】
そして、入力部7から入力された回転運動エネルギーの一部は従動コンベア33(図3参照)の駆動エネルギーとして消費され、台車4の従動コンベア33から下流側ステーション3の駆動コンベア1へのワークWの搬出がスムーズに行われる。尚、従動コンベア33の下流部に設けられた落下防止ストッパS(図20参照)は、台車4が下流側ステーション3前に停車した時点で、下流側ステーション3の適宜の箇所に当たって持ち上がり、ワークWが従動コンベア33の下流側に移動するのを許容する状態となっている。そして、この落下防止ストッパSは、台車4が下流側ステーション3から離れると、元の状態に戻る。
【0048】
また、ワークWの搬出中に、昇降部材20は例えば上昇端にまで上昇するのであり、この点は、台車4が上流側ステーション2前に停車しているときと同様である。
【0049】
(5)ワークWの搬出が完了すると、台車4の上部に設けられたリンク機構43(図19(A)参照)がワークWの除去(重量の低下)によって作動し、このリンク機構43に連結された台車4の係合部41と、下流側ステーション3の被係合部41との係合が解除される(図19(A)参照)。尚、リンク機構43の構成は公知のものを採用可能であり、その詳細については説明を省略する。
【0050】
また、ワークWの搬入が完了すると、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持していたストッパ(図示していない)による台車4の保持も解除される。従って、台車4は、昇降部材20の下降に伴って上流側ステーション2に向けて移動する。
【0051】
(6)台車4が上流側ステーション2に近づき、昇降部材20が下降端付近にまで至ると、エアシリンダ23(図15(B)参照)の働きにより、台車4の速度は低下し、やがて台車4は滑らかに上流側ステーション2に停車する。
【0052】
このとき、図19(A)に示すように、台車4に設けられた係合部39が上流側ステーション3の被係合部40に係合し、台車4の移動が不可能な状態になる。また、上流側ステーション2の出力部6に台車4の入力部7が接続される。さらに、図示していないストッパが、出力部6に対する入力部7の接続と、被係合部40に対する係合部39の係合とは許容しつつ、回転体12がレール5に係合しないように台車4を少し持ち上げた状態で保持する。
【0053】
また、このとき、台車4の切換え機構のスライド体27に上流側ステーション2の切換え棒30が当接し、回転体12は一対の係合レール5aの一方に噛合う状態となるように切り換わり、台車4の走行方向は反転される。これにより、上記(1)の状態となる。
【0054】
本実施形態の搬送システムは、各ステーション2,3の駆動コンベア1から出力部6を介して台車4にエネルギーを補給することができるものであり、台車4に対する内部電源の搭載を不要としてイニシャルコストを低減することができ、また、外部から台車4への電力供給も不要であるので、弊害の発生を伴う電力ケーブルの接続を台車4に行う必要もない。さらに、台車4の移動の前後でワークWの保持高さを一定に保つことができるので、ワークWの台車4への搬入高さと台車4からの搬出高さとを一致させるために、リフター装置等の他の装置を用いる必要もない。
【0055】
上記特許文献1に記載された軌道台車では、ワークの荷重がワークの搬送に消費されるエネルギーに変換されるものであるため、ワークの荷重によっては搬送距離が伸びず、搬送が途中で終了してしまう懸念があるが、本実施形態の搬送システムでは、各ステーション2,3前で常に十分な一定量のエネルギーを台車4に供給可能であるので、ワークWの確実な搬送を実現することができる。また、各ステーション2,3前での台車4に対するエネルギーの備蓄量を増減すれば、搬送距離も自在に変更することができる。
【0056】
本実施形態の搬送システムでは、台車4を移動させるに際して、回転体(歯車)12とレール(ラック)5との噛合いに加えて、ガイドレール32によるカムフォロア31のガイドを採用したので、台車4に安定した走行を行わせることができる上、台車4に直線走行だけでなく曲線走行を行わせることも可能である。すなわち、台車4に曲線走行を行わせたい場合、レール5及びガイドレール32を曲線状に延ばせばよい。
【0057】
なお、本発明は、上記の実施の形態に何ら限定されず、本発明の要旨を逸脱しない範囲において種々に変形して実施し得ることは勿論である。例えば、以下のような変形例を挙げることができる。
【0058】
本実施形態の搬送システムでは、二つのステーション2,3は、ワークWの搬送方向に離れているのみならず、この搬送方向と直交する水平方向にも離れているが、ワークWの搬送方向のみに離れた二つのステーション間のワークWの移送に台車4を用いるようにすることもでき、さらには、台車4は二つのステーション間を往復移動するものに限らず、例えば、台車4が複数のステーションにわたってループ状に移動するように構成されていてもよい。このように台車4がループ状に周回走行し、走行方向の反転が不要な場合は、上記切換え機構を省略することができると共に、一対の係合レール5aも何れか片方のみ設ければ足りる。
【0059】
本実施形態の搬送システムでは、レール5をラックとし、回転体12をこのラックと噛み合う歯車としているが、これに限らず、例えば、レール5を歯付きベルトとし、回転体12をこれと噛み合う歯付きプーリーとしてもよい。
【0060】
本実施形態の搬送システムでは、回転体12と動力伝達歯車24とを直接噛み合わせているが、例えば両者12、24の間にギア群を設けて、ギア比を適宜に変更するようにしてもよい。
【0061】
本実施形態の搬送システムでは、台車4を各ステーション2,3前に滑らかに停車させるためにエアシリンダ23を設けているが、エアシリンダ23の代わりに、例えば弾性部材を設けて同様の機能を発揮させるようにしてもよい。
【0062】
本実施形態の搬送システムでは、台車4が各ステーション2,3前に停車したときに回転体12がレール5に係合しないように台車4を少し持ち上げて保持するストッパは、各ステーション2,3を制御する制御部により制御され、台車4の保持操作及びその解除操作を行うようにしてあるが、これに限らず、例えば、台車4が各ステーション2,3に停車したときに台車4の一部がストッパに当接する等してストッパがこの停車に機械的に連動して台車4を保持し、その後、昇降部材20が上昇して所定高さに到達したときに昇降部材20の一部がストッパに当接する等してストッパがこの到達に機械的に連動して台車4の保持を解除する、というように構成されていてもよい。
【0063】
なお、上記変形例どうしを適宜組み合わせてもよいことはいうまでもない。
【符号の説明】
【0064】
1 駆動コンベア
2 ステーション(上流側ステーション)
3 ステーション(下流側ステーション)
4 台車
5 レール
5a 係合レール
6 出力部
7 入力部
12 回転体
19 ボールねじ軸
20 昇降部材
W ワーク
【特許請求の範囲】
【請求項1】
搬送物を搬送するための駆動コンベアを有する複数のステーションと、搬送物を移載するために各ステーション前に停車する台車と、複数の前記ステーションを結ぶように延びるレールとを備えた搬送システムであって、
前記ステーションに、前記駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部が設けられ、
前記台車に、前記出力部に着脱自在に接続される入力部と、該入力部から入力された前記回転運動エネルギーを位置エネルギーに変換して備蓄した後、該位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、
前記回転体の回転運動エネルギーが、前記台車が複数の前記ステーション間を移動するための運動エネルギーに変換されるように、前記回転体は前記レールに係合することを特徴とする搬送システム。
【請求項2】
前記エネルギー備蓄機構は、上下方向に延びるボールねじ軸と、該ボールねじ軸に螺合し、該ボールねじ軸が一方向及び逆方向の軸回りに回転するのに伴って該ボールねじ軸に沿って昇降するようにガイドされた昇降部材と、前記ボールねじ軸と連動して回転する前記回転体とを備え、
前記入力部から入力された前記回転運動エネルギーは、前記ボールねじ軸を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸の一方向の軸回りの回転に伴って上昇する前記昇降部材の位置エネルギーとして備蓄され、
備蓄された前記位置エネルギーは、前記昇降部材が自重により下降するのに伴って前記ボールねじ軸を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、該ボールねじ軸と連動するように構成された前記回転体の回転運動エネルギーに変換される請求項1に記載の搬送システム。
【請求項3】
前記台車は二つの前記ステーション間を往復移動するように構成されていると共に、該二つのステーションを結ぶ前記レールは対向配置された一対の係合レールからなり、
前記台車に、該台車が前記二つのステーション前に停車するときに、前記一対の係合レールの一方に係合する状態の前記回転体を前記一対の係合レールの他方に係合する状態に切り換えるための切換え機構が設けられている請求項1または2に記載の搬送システム。
【請求項4】
前記台車に、前記入力部から入力された前記回転運動エネルギーによって駆動する従動コンベアが設けられている請求項1〜3の何れか一項に記載の搬送システム。
【請求項1】
搬送物を搬送するための駆動コンベアを有する複数のステーションと、搬送物を移載するために各ステーション前に停車する台車と、複数の前記ステーションを結ぶように延びるレールとを備えた搬送システムであって、
前記ステーションに、前記駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部が設けられ、
前記台車に、前記出力部に着脱自在に接続される入力部と、該入力部から入力された前記回転運動エネルギーを位置エネルギーに変換して備蓄した後、該位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、
前記回転体の回転運動エネルギーが、前記台車が複数の前記ステーション間を移動するための運動エネルギーに変換されるように、前記回転体は前記レールに係合することを特徴とする搬送システム。
【請求項2】
前記エネルギー備蓄機構は、上下方向に延びるボールねじ軸と、該ボールねじ軸に螺合し、該ボールねじ軸が一方向及び逆方向の軸回りに回転するのに伴って該ボールねじ軸に沿って昇降するようにガイドされた昇降部材と、前記ボールねじ軸と連動して回転する前記回転体とを備え、
前記入力部から入力された前記回転運動エネルギーは、前記ボールねじ軸を一方向の軸回りに回転させる回転運動エネルギーに変換され、さらに、このボールねじ軸の一方向の軸回りの回転に伴って上昇する前記昇降部材の位置エネルギーとして備蓄され、
備蓄された前記位置エネルギーは、前記昇降部材が自重により下降するのに伴って前記ボールねじ軸を逆方向の軸回りに回転させる回転運動エネルギーに変換されると共に、該ボールねじ軸と連動するように構成された前記回転体の回転運動エネルギーに変換される請求項1に記載の搬送システム。
【請求項3】
前記台車は二つの前記ステーション間を往復移動するように構成されていると共に、該二つのステーションを結ぶ前記レールは対向配置された一対の係合レールからなり、
前記台車に、該台車が前記二つのステーション前に停車するときに、前記一対の係合レールの一方に係合する状態の前記回転体を前記一対の係合レールの他方に係合する状態に切り換えるための切換え機構が設けられている請求項1または2に記載の搬送システム。
【請求項4】
前記台車に、前記入力部から入力された前記回転運動エネルギーによって駆動する従動コンベアが設けられている請求項1〜3の何れか一項に記載の搬送システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】
【図15】

【図16】

【図17】

【図18】
【図19】
【図20】
【図21】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−47138(P2013−47138A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−186498(P2011−186498)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000191353)新明工業株式会社 (75)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000191353)新明工業株式会社 (75)
【Fターム(参考)】
[ Back to top ]