
Fターム[3F044CE07]の内容
Fターム[3F044CE07]の下位に属するFターム
Fターム[3F044CE07]に分類される特許
1 - 20 / 49
無人搬送車による台車の自動搬送システム
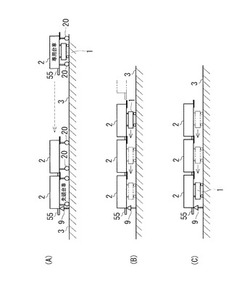
【課題】簡易な機械式の構成で実施する、無人搬送車による台車の自動搬送システムを提供する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
(もっと読む)
ワーク搬送システム

【課題】搬入台車上のワークの高さの調整を容易に行い、また、工場内のレイアウトを自由に設定できるようにする。
【解決手段】走行機構121を備える台車本体12と前記台車本体12に対して昇降可能に連結されてワークWを載置する載置部11とを有する搬送台車10と、搬入口21から搬入される前記ワークWに加工処理を行う工作機械20とを備えるワーク搬送システムであって、前記搬送台車10に、前記載置部11に取り付けられる係合部112を設け、前記工作機械20に、前記係合部112と係合して前記載置部11を上下方向にガイドする昇降ガイドレール22を設け、前記搬送台車10の走行によって前記係合部112が前記昇降ガイドレール22によりガイドされ、前記載置部11が前記搬入口に対して所定の高さとなるように位置決めされる。
(もっと読む)
無人搬送システムおよび無人搬送車
【課題】パレットのバッテリ残量に影響されることなく、パレットからのデータ信号を無人搬送車で受信して走行することができる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】無人搬送車1のハロゲンランプ7から光をパレット100の太陽電池パネル106へ出力することにより、パレット100の光データ通信器105を太陽電池パネル106から供給される電力によって駆動させて光データ信号を出力させ、その光データ信号が光データ通信器6に受信される。これにより、パレット100のバッテリ残量に影響されることなく、無人搬送車1の走行を制御させることができる。
(もっと読む)
ワーク移送路付き運搬台車
【課題】 ワークストッパの機能無効によるワークの落下及び、台車走行中に於いてワーク移送路の長さよりも短いワークの静止保持が出来ないことによるワークの荷崩れの危険を防止し、且つ、その機能を無効に出来ないワーク移送路付き運搬台車を提供する。
【解決手段】 互いに平行な複数のローラによって構成されるワーク移送路を備え、ワーク移送路を構成するローラの少なくとも1つが、正方向、逆方向どちらか一方向のみの回転制御機構を有するローラである、ワーク移送路付き運搬台車。
(もっと読む)
搬送車システムと物品の移載方法及び搬送車
【課題】
物品をステーションへ移載する際に、搬送車側が受ける反力を支えることができるようにして、物品を正確に位置決めする。
【構成】
搬送車システムの搬送車は、物品の底面を支持する第1のコンベヤと、ステーション側へ進出した状態と搬送車上に復帰した状態との間で第1のコンベヤを進退させる進退機構と、第1のコンベヤのステーション側端部に設けられた係合部と、ステーション側の被係合部に係合部を係合すると共に係合を解除する係合機構、とを備えている。ステーションは、物品の底面を支持する第2のコンベヤと、ステーションの無人搬送車側端部に設けられて係合部と係合自在な被係合部、とを備えている。
(もっと読む)
搬送システム、およびそれを用いたデバイスの製造方法
【課題】原版を迅速に、かつ安全に搬送するのに有利な搬送システムを提供する。
【解決手段】この搬送システム1は、原版3に形成されたパターンを基板に露光する少なくとも1つの露光装置2と、原版3を保持し露光装置2に搬送する搬送車4と、該搬送車4が走行する走行路5とを有する。このとき、露光装置2が敷設される面から、露光装置2に設置された原版3を搬入する搬入口9までの高さが、搬送車4が走行する面から、搬送車4が原版3を保持して走行する際の原版3の保持位置までの高さよりも高く、搬送車4の保持位置と、露光装置2が搬入口9から原版3を受け取る位置とが一致する。
(もっと読む)
荷搬送設備
【課題】搬送台車がパレットの下にもぐり込みパレットを持ち上げて搬送する構成であって、パレットを置く位置を提示する位置決めガイドを不要にでき、また作業者の負担を軽減できる荷搬送設備を提供することを目的とする。
【解決手段】パレット13の平板23の裏面に第1ガイドライン41を設け、搬送台車12は、このパレット13に設けられた第1ガイドライン41を検出し、第1ガイドライン41に沿って移動し、支持脚24の間の空間21にもぐり込み、リフタ32によるパレット13への持ち上げ位置へ自動誘導される構成とする。この構成により、パレット13を所定位置にラフに置いても、搬送台車12を、前記持ち上げ位置に正確に停止することができ、よってパレット13を置く位置を提示する位置決めガイドの設置を不要にすることができ、また作業者の負担を軽減できる。
(もっと読む)
搬送装置及び搬送システム
【課題】ピットを掘る必要をなくすことでコストを削減でき、容易に設備ラインの長さを変更したり、設備を移設・増設したりすることが可能な搬送装置及び搬送システムを提供する。
【解決手段】搬送装置100は、それぞれが一対のスプロケット13・13に捲回されて対向する一対のチェーン14・14と、一対のチェーン14・14の間に掛け渡されて設けられる複数枚のスラット16・16・・・と、を備える、スラットコンベア10と、スラットコンベア10が備えるスラット16・16・・・における外面上側に対して着脱可能に配設される、支持部材21と、を具備し、支持部材21の上部にワークWを載置した状態で、スラットコンベア10を駆動させることにより、ワークWを搬送する。
(もっと読む)
搬送台車移動システム、搬送ライン及び搬送方法
【課題】ベース部品に対する下方と、ベース部品に対する上方及び側方との上下2段における作業を、別々の作業者によって同時間帯に行うことができる搬送台車移動システムを提供すること。
【解決手段】搬送台車移動システム1は、ベース部品8を載置する搬送台車3を、複数台連続して組付作業工程に移動させるよう構成してある。互いに隣接する搬送台車3間においては、搬送台車3Aの複数のポスト44Dと、搬送台車3Bの複数のポスト44Cとに、上方作業台7が架け渡してある。搬送台車3が移動する床面2には、上方作業台7に対する、搬送台車3の移動方向Dの左右両側に、固定作業台15が設置してある。搬送台車移動システム1は、搬送台車3が複数台連続して移動する際に、下方作業台5と、上方作業台7及び固定作業台15との上下2段の作業台において、ベース部品8に対して作業者Mが作業できるよう構成してある。
(もっと読む)
搬送車両システム
【課題】搬送台車及び駆動車の各旋回中心を一致させて、より精度よく搬送台車を走行する搬送車両システムを提供する。
【解決手段】第1の固定車輪11、12、及び第1の固定車輪11、12を駆動する駆動源13、14を備え、その場旋回可能な駆動車15と、駆動車15に備えられ、第2の固定車輪43、44を備えてその場旋回可能で駆動車15に連結可能な搬送台車16の旋回中心を検知する旋回中心検知手段31と、駆動車15に設けられ、旋回中心検知手段31の出力から、搬送台車16の旋回中心が、駆動車15の旋回中心に一致したことを検知して、搬送台車16と駆動車15を固定する連結手段40とを有する。
(もっと読む)
台車
【課題】 例えば軽量ワークなどを搭載した台車をコンベアに同期して走行させ、また、台車を任意の場所に簡単に移動させることができるようにする。
【解決手段】 台車1の駆動輪2が取り付けられる駆動軸3に駆動スプロケット5を設け、この駆動軸3とは別個の主軸6に、大径スプロケット7を設けて駆動スプロケット5と大径スプロケット7間にチェーン8を巻き掛ける。また、主軸6に、大径スプロケット7とは別個の小スプロケット11を一体に設け、この小スプロケット11に、錘17が下降することで小スプロケット11を回転させることのできるチェーン16を巻き掛け、台車1を手押し等で後退させると、錘17が巻き上げられ、その後、錘17が自重で降下すると駆動輪2が正回転するようにする。
(もっと読む)
車両
【課題】弾性体に備蓄された弾性力を駆動力として使用するとともに、少ない部品数でスムーズに進行方向を変更できる性能を確保し、小型軽量で省エネルギ化できる車両を提供する。
【解決手段】車両本体20が独立駆動の一対の主駆動輪53A、53Bを備え、一対の主駆動輪53A、53Bの回転速度差で車両本体20を操舵可能に構成し、入力された動力を弾性力に変換して備蓄する一方、備蓄した弾性力を動力として出力可能な弾性体を含むエネルギ備蓄機構60と、エネルギ備蓄機構60の動力により駆動される補助駆動輪61とを備え、補助駆動輪61の回転軸線を一対の主駆動輪53A、53Bの各接地箇所から立ち上がる垂直な面内に存在させた。
(もっと読む)
車両
【課題】弾性体に備蓄された弾性力が経路途中ですべて消費される事態を防止できる車両を提供すること。
【解決手段】車体フレーム24の補助駆動輪38に連結され、動力を弾性力に変換して備蓄可能な一方、備蓄した弾性力を動力として補助駆動輪に出力可能なぜんまいばね32を含むエネルギ備蓄機構34と、このエネルギ備蓄機構34のぜんまいばね32に動力を入力する第2シャフト41bと、ぜんまいばね32に備蓄された弾性力を補助駆動輪38に出力する第1シャフト41aと、これら各シャフト41a,41bの回転数に基づいてぜんまいばね32に備蓄された弾性力の残量を算出する。
(もっと読む)
搬送装置
【課題】搬送用バケットが載せられる台車および受け台と、該バケットを台車から受け台に移送する移送装置とを備える搬送装置による台車から受け台へのバケットの搬送作業の効率の向上を図る。
【解決手段】搬送装置1は、搬送用バケットBに当接しない退避位置およびバケットBに当接可能な当接可能位置を占める搬出用当接部51および位置決め用当接部52と、当接部51,52を移送方向に駆動する駆動部60とを備える。駆動部60は、当接可能位置の当接部52および退避位置の当接部51を搬入方向に駆動して、バケットBと当接状態にある当接部52により、バケットBを搬入方向に所定位置Pまで台車2上で移動させた後、当接可能位置の当接部51,52を搬出方向に駆動してバケットBと当接状態にある当接部51により、所定位置PのバケットBを搬出方向に台車2から搬送台3まで移動させる。
(もっと読む)
物品搬送設備
【課題】物品搬送車の第2搬送車用コンベアと第2荷受台の荷受台用コンベアとの間での物品の授受を円滑に行うことができる物品搬送設備を提供する。
【解決手段】第1搬送車用コンベアの一対のコンベア部分1aにおける第2荷受台5Bが位置する側のコンベア部分1aと第2荷受台5Bの荷受台用コンベア4との間に離間用空間が形成されるように物品搬送車3が第2荷受台5Bと第2搬送方向に並んで隣接する状態において、離間用空間に位置して第2搬送車用コンベア1Bと第2荷受台5Bの荷受台用コンベア1Bとの間で物品を第2搬送方向に沿って移動自在に載置支持可能な載置位置と離間用空間から退避させた退避位置とに位置変更自在な補助コンベア24を設ける。
(もっと読む)
給紙無人搬送車システム
【課題】無人搬送車に搭載される載荷用テーブルに必要とされるスライドストロークを短縮し、無人搬送車のコンパクト化を実現する給紙無人搬送車システムを提供する。
【解決手段】輪転機と輪転機に対して新聞巻取紙を装着・回収する無人搬送車とを有する給紙無人搬送車システムにおいて、輪転機の給紙エリアに無人搬送車を誘導する誘導ラインが、一つの輪転機に対して複数設けられていることにより上記の課題を解決する。
(もっと読む)
無人車の搬送システム
【課題】複数のシステムの走行路の一部が共用化された共用エリアを有する無人搬送システムにおいて無駄な走行指示をなくすことができる無人車の搬送システムを提供する。
【解決手段】Aシステムに連結されるとともにAシステムにおける無人車の走行路の一部とBシステムにおける無人車の走行路の一部とが共用化された共通エリアを有している。地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車をAシステムのホームステーションに回送する。また、地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車について、Aシステム用の無人車であるかBシステム用の無人車であるかをリセットした後に、新たにAシステム用またはBシステム用のどちらかに割付ける。
(もっと読む)
搬送台車
【課題】構造簡素で、荷台を支えるバネ力の調整が容易にでき、軽量物の搬送に好適な搬送台車を提供すること。
【解決手段】無人で移動させる搬送台車1において、移動可能な台車部10に昇降自在に設置された荷台2を、上記荷台の上方に設置した本体部60と、これから引き出し可能なワイヤ61と、ワイヤ61を巻き取り方向に付勢する付勢手段とを備えたスプリングバランサ6により昇降可能に支持せしめ、荷台2に載置した搬送物Mの重量によりワイヤ61が引き出されて上記荷台が下降すると、荷台2の昇降を回転作動に変換する作動変換手段たるラック部3、ピニオン部31を介して駆動輪5を前進駆動せしめ、搬送物Mの取り出しによりワイヤ61が巻き戻されて荷台2を引き上げられ、荷台2の上昇により駆動輪5を後退駆動させるようにした。
(もっと読む)
無人搬送車及び無人搬送車による部品供給方法
【課題】無人搬送車の搬送経路に有人作業工程及び自動作業工程が混在する場合、両工程においてスムーズに部品を供給することのできる無人搬送車を提供する。
【解決手段】本無人搬送車1は、作業者により部品を搬出する有人作業工程専用の第1部品収容台4と、自動で部品を搬出する自動作業工程専用の第2部品収容台5とを備えたので、無人搬送車1の搬送経路に有人作業工程及び自動作業工程が混在しても、両工程においてスムーズに部品10を供給することのできる。
(もっと読む)
搬送システム、走行車
【課題】単数の測距装置で走行車の位置と姿勢を測定する。
【解決手段】ステーション110と、目標位置に目標姿勢で停止する走行車140と、荷物を移載する移載手段170とを備える搬送システム100であって、ステーション110と走行車140との距離を測定する測距手段141を単数と、測距手段141の測距対象となる第一測距部111、及び、第二測距部112と、第一測距部111との第一距離を取得し、走行車140を所定距離かつ所定方向に走行させ、第二測距部112との第二距離を取得する制御部151と、前記第一距離と前記第二距離とに基づき走行車140の目標姿勢からの傾きである傾き値を算出する算出部152と、傾き値に基づき移載手段170の移載条件を決定する移載条件決定部153とを備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]