
搬送装置

【課題】可搬重量が大きく搬送距離が長い搬送装置を提供する。
【解決手段】搬送装置10は、第1関節24を回転軸として第1アーム12が回転するように第1アーム12が第1関節24に連結され、第2関節26を回転軸として第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、第2アーム14が第2関節26に連結されている。連結部材30によって第3アーム16が第2アーム14に対して固定される。第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向Lに沿って第1ステージ18が移動するように、第1ステージ18が連結部材30に連結されている。さらに、第1関節24を回転軸として第1アーム12が回転するとき、方向Lに沿って第2ステージ20が移動するように、第3関節40に第2ステージ20が連結されている。
【解決手段】搬送装置10は、第1関節24を回転軸として第1アーム12が回転するように第1アーム12が第1関節24に連結され、第2関節26を回転軸として第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、第2アーム14が第2関節26に連結されている。連結部材30によって第3アーム16が第2アーム14に対して固定される。第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向Lに沿って第1ステージ18が移動するように、第1ステージ18が連結部材30に連結されている。さらに、第1関節24を回転軸として第1アーム12が回転するとき、方向Lに沿って第2ステージ20が移動するように、第3関節40に第2ステージ20が連結されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ガラス基板等の各種基板や、各種基板を複数枚収納したカセットなどを搬送するときに使用する搬送装置に関する。
【背景技術】
【0002】
ガラス基板等の各種基板を搬送する搬送装置として、スカラアームを用いたものがある(特許文献1)。スカラアームは複数のアームが関節で接続されており、各アームが同期して回転運動することによって、スカラアームの先端が水平方向に直線運動する。ある場所でスカラアームの先端に載置された基板は、この直線運動によって移動し、その後スカラアームから降ろされることによって他の場所に搬送される。
【0003】
スカラアームの先端に重い基板を載せると、アームがたわんでしまい、アームの水平方向への動きを妨げてしまう。また、搬送距離を長くするためにアームを長くすると、アーム自体が重くなってアームがたわんでしまう。スカラアームの機能を維持したままで、耐荷重性に優れ、搬送距離が長い搬送装置の出現が望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−308984号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、このような事情に鑑みてなされたものであり、可搬重量が大きく搬送距離が長い搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の搬送装置は、支持台と、第1アームと、第2アームと、第3アームと、第1ステージと、第2ステージとを有し、第2ステージに設けられた載置部に載置された搬送物を搬送する搬送装置であって、支持台に設けられた第1関節を回転軸として第1アームが回転するように、第1アームの一端が第1関節に連結され、第1アームの他端に設けられた第2関節を回転軸として、第1アームの回転速度の2倍の逆回転速度で第2アームが回転するように、第2アームの一端が第2関節に連結され、第2アームの他端に設けられた連結部材によって第3アームが第2アームに対して固定されるように、第3アームの一端が連結部材に連結され、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向に沿って第1ステージが移動するように、第1ステージが連結部材に連結され、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向に沿って第2ステージが移動するように、第3アームの他端に設けられた第3関節に第2ステージが連結されている。
【0007】
本発明の搬送装置においては、第1関節を回転軸として第1アームが回転するとき、第2ステージは、第1ステージに設けられたガイド部材に沿って第1ステージの上部を移動するのが好ましい。また、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向と垂直方向に沿って、第3関節が第2ステージに対して移動するように、第3関節に第2ステージが連結されているのが好ましい。また、第2関節と、連結部材と、第3関節とが、上面から見たときに、ほぼ直線上に配置されていても良い。
【発明の効果】
【0008】
本発明によれば、可搬重量が大きく搬送距離が長い搬送装置が得られる。
【図面の簡単な説明】
【0009】
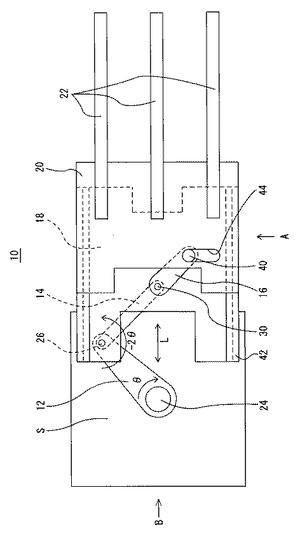
【図1】本発明の実施形態に係る搬送装置を説明するために示す平面模式図である。
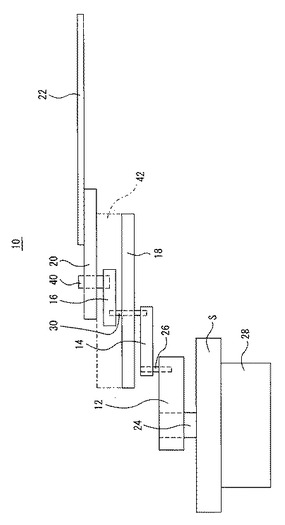
【図2】本発明の実施形態に係る搬送装置を説明するために示す側面模式図である。
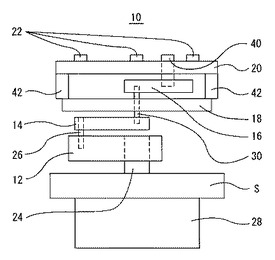
【図3】本発明の実施形態に係る搬送装置を説明するために示す他の側面模式図である。
【発明を実施するための形態】
【0010】
以下、本発明の搬送装置について、図面を参照しながら実施形態に基づいて説明する。なお、図面は搬送装置および搬送装置を構成する部材等を模式的に表したものであり、これらの実際の寸法および寸法比は、図面上の寸法および寸法比と必ずしも一致していない。また、重複説明は適宜省略する。
【0011】
図1は、本発明の実施形態に係る搬送装置10の平面模式図である。図2は、図1に示す搬送装置10をA方向から見た側面模式図である。図3は、図1に示す搬送装置10をB方向から見た側面模式図である。なお、図2および図3では、図1に示す搬送装置10の部材の一部を省略してある。
【0012】
搬送装置10は、支持台Sと、第1アーム12と、第2アーム14と、第3アーム16と、第1ステージ18と、第2ステージ20とを有し、第2ステージ20に設けられた載置部22に載置された搬送物(不図示)を搬送する。支持台S、第1アーム12、第2アーム14、第3アーム16、第1ステージ18、および第2ステージ20は、ステンレスやアルミニウム等の金属から構成されているが、これらの材質は特に限定されない。
【0013】
支持台Sは筐体(不図示)に固定されている。支持台Sに設けられた第1関節24を回転軸として第1アーム12が回転するように、第1アーム12の一端が第1関節24に連結されている。また、第1アーム12の他端に設けられた第2関節26を回転軸として、第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、第2アーム14の一端が第2関節26に連結されている。具体的には、第1関節24と第2関節26は、基準径が2:1の関係で、タイミングベルトまたは歯車等の伝達機構によって、第1アーム12内部で動力を伝えるようになっている。
【0014】
図2および図3に示すように、支持台Sの下部には制御ボックス28が設けられている。制御ボックス28の内部には、第1関節24および第2関節26を回転させる電気モータ等の駆動部材と、駆動部材を駆動する電源等の駆動源と、第1関節24を駆動して第1アーム12が角度θだけ回転する間に、第2関節26を駆動して第2アーム14が角度−2θだけ回転するように制御する制御部等が収納されている(いずれも不図示)。第1アーム12と第2アーム14の回転速度がこのように制御されるので、第1関節24と後述する連結部材30は、搬送装置10を上面から見たときに、同じ直線上で離れたり近付いたりする(図1の矢印L参照)。
【0015】
第2アーム14の他端に設けられた連結部材30によって第3アーム16が第2アーム14に対して固定されるように、第3アーム16の一端が連結部材30に連結されている。また、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)に沿って第1ステージ18が移動するように、第1ステージ18が連結部材30に連結されている。
【0016】
具体的には、図2および図3に示すように、第2アーム14と第3アーム16の間にある連結部材30の部分が、第1ステージ18に形成された孔部(不図示)に挿入されている。第1ステージ18は、支持台Sに設けられた複数段のスライドレール(不図示)によって底面が支持され、連結部材30の移動と同期して、連結部材30の移動方向と同じ方向に移動できるように構成されている。
【0017】
さらに、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)に沿って第2ステージ20が移動するように、第3アーム16の他端に設けられた第3関節40に第2ステージ20が連結されている。このため、第1アーム12の回転によって、第1ステージ18および第2ステージ20が同時に伸縮できる。したがって、搬送距離を長くすることができる。
【0018】
本実施形態では、図1から図3に示すように、第1ステージ18上にガイド部材であるスライドレール42が設けられている。第2ステージ20は、スライドレール42によって底面を支持され、連結部材30の移動と同期して、連結部材30の移動方向と同じ方向に移動できるように構成されている。つまり、第2ステージ20は、スライドレール42に沿って第1ステージ18の上部を移動する。
【0019】
また、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動するように、第3関節40に第2ステージ20が連結されている。本実施形態では、第2ステージ20は、第2ステージ20に設けられた長孔44を介して、第3関節40に連結されている。第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って長手に、長孔44が形成されている。
【0020】
本実施形態では第2アーム14と第3アーム16が連結部材30によって直線状に固定されているため、第1関節24を回転軸として第1アーム12が回転するとき、すなわち、第2関節26を回転軸として第2アーム14が回転するとき、第3関節40も第2関節26を回転軸として回転する。
【0021】
このため、第3関節40に誘導された第2ステージ20が、連結部材30が移動する方向(図1の矢印L参照)と同じ方向に移動すると、搬送装置10を上面から見たときに連結部材30が移動する方向と垂直の方向にも、第3関節40から第2ステージ20に対して力が及ぶ。したがって、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動できることにより、第3関節40から第2ステージ20に対して及ぶこの垂直の方向の力を逃がすことができる。
【0022】
この結果、第2ステージ20からの反作用による支持台Sへの力学的負荷を減らすことができ、支持台Sを筐体に固定する機構のコストダウンが図れる。本実施形態では、長孔44を設けることにより、第3関節40から第2ステージ20に対して及ぶこの垂直の方向の力を逃がすことができる。第3関節40は、第2ステージ20に設けられたスライドレール(不図示)に誘導されて、長孔44内を移動する。なお、長孔44を設けず、スライドレールのみによって、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動できるようにしても良いし、スライドレール以外の部材を用いても良い。
【0023】
また、本実施形態では、第2関節14と、連結部材30と、第3関節40とが、搬送装置10を上面から見たときに、ほぼ直線上に配置されている。このため、第2アーム14の回転によって第2ステージ20をより遠くに送り出すことができる。この結果、搬送距離を長くすることができる。
【0024】
つぎに、搬送装置10の動作について説明する。まず、第1ステージ18および第2ステージ20が縮んだ状態で、載置部22にガラス基板や基板カセット等の搬送物(不図示)を載せる。このとき、第1ステージ18および第2ステージ20は、完全に縮みきった状態でも良いし、途中まで縮んだ状態でも良い。
【0025】
そして、第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、駆動部材、駆動源、および制御部等を第1関節24および第2関節26に作用させて、第1アーム12、第2アーム14、および第3アーム16を動かす。その結果、連結部材30は、搬送装置10を上面から見たときに、直線運動をする(図1の矢印L参照)。
【0026】
このとき、第1ステージ18は、連結部材30の移動と同期して、連結部材30に導かれながら連結部材30の移動方向と同じ方向に直線運動をする(図1の矢印L参照)。さらに、第2ステージ20は、第3関節40に導かれて、スライドレール42に沿って連結部材30の移動方向と同じ方向に、第1ステージ18の上部を直線運動する(図1の矢印L参照)。
【0027】
こうして、第1ステージ18および第2ステージ20が伸びた状態となり、載置部22に載せられたガラス基板や基板カセット等の搬送物(不図示)を載置部22から降ろす。このとき、第1ステージ18および第2ステージ20は、完全に伸びきった状態でも良いし、途中まで伸びた状態でも良い。搬送物を載置部22から降ろす方法としては、載置部22の間から支持部材を上昇させて、載置部22からこの支持部材に搬送物を移す方法や、クレーン等で搬送物を吊り上げた状態で第1ステージ18および第2ステージ20を縮めて、その後搬送物を降ろす方法等が挙げられる。
【0028】
以上、実施形態に基づき、本発明の搬送装置について説明したが、本発明の搬送装置は上述した実施形態に限定されない。例えば、第2アーム14と第3アーム16を一体化しても良い。この場合、一体化したアームの中央付近に柱状突起物を設け、この突起物に第1ステージを連結すれば実施形態の搬送装置と同様の効果が得られる。
【0029】
また、第2ステージ20に設ける長孔は、第1ステージ18および第2ステージ20の伸縮によって第3関節40が動く軌跡を考慮した曲線形状であっても良い。また、アーム、関節、連結部材、およびステージを実施形態の搬送装置にさらに追加して、搬送距離がより長い搬送装置としても良い。
【符号の説明】
【0030】
S 支持台
10 搬送装置
12 第1アーム
14 第2アーム
16 第3アーム
18 第1ステージ
20 第2ステージ
22 載置部
24 第1関節
26 第2関節
30 連結部材
40 第3関節
42 スライドレール
44 長孔
【技術分野】
【0001】
本発明は、ガラス基板等の各種基板や、各種基板を複数枚収納したカセットなどを搬送するときに使用する搬送装置に関する。
【背景技術】
【0002】
ガラス基板等の各種基板を搬送する搬送装置として、スカラアームを用いたものがある(特許文献1)。スカラアームは複数のアームが関節で接続されており、各アームが同期して回転運動することによって、スカラアームの先端が水平方向に直線運動する。ある場所でスカラアームの先端に載置された基板は、この直線運動によって移動し、その後スカラアームから降ろされることによって他の場所に搬送される。
【0003】
スカラアームの先端に重い基板を載せると、アームがたわんでしまい、アームの水平方向への動きを妨げてしまう。また、搬送距離を長くするためにアームを長くすると、アーム自体が重くなってアームがたわんでしまう。スカラアームの機能を維持したままで、耐荷重性に優れ、搬送距離が長い搬送装置の出現が望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−308984号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、このような事情に鑑みてなされたものであり、可搬重量が大きく搬送距離が長い搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の搬送装置は、支持台と、第1アームと、第2アームと、第3アームと、第1ステージと、第2ステージとを有し、第2ステージに設けられた載置部に載置された搬送物を搬送する搬送装置であって、支持台に設けられた第1関節を回転軸として第1アームが回転するように、第1アームの一端が第1関節に連結され、第1アームの他端に設けられた第2関節を回転軸として、第1アームの回転速度の2倍の逆回転速度で第2アームが回転するように、第2アームの一端が第2関節に連結され、第2アームの他端に設けられた連結部材によって第3アームが第2アームに対して固定されるように、第3アームの一端が連結部材に連結され、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向に沿って第1ステージが移動するように、第1ステージが連結部材に連結され、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向に沿って第2ステージが移動するように、第3アームの他端に設けられた第3関節に第2ステージが連結されている。
【0007】
本発明の搬送装置においては、第1関節を回転軸として第1アームが回転するとき、第2ステージは、第1ステージに設けられたガイド部材に沿って第1ステージの上部を移動するのが好ましい。また、第1関節を回転軸として第1アームが回転するとき、連結部材が移動する方向と垂直方向に沿って、第3関節が第2ステージに対して移動するように、第3関節に第2ステージが連結されているのが好ましい。また、第2関節と、連結部材と、第3関節とが、上面から見たときに、ほぼ直線上に配置されていても良い。
【発明の効果】
【0008】
本発明によれば、可搬重量が大きく搬送距離が長い搬送装置が得られる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係る搬送装置を説明するために示す平面模式図である。
【図2】本発明の実施形態に係る搬送装置を説明するために示す側面模式図である。
【図3】本発明の実施形態に係る搬送装置を説明するために示す他の側面模式図である。
【発明を実施するための形態】
【0010】
以下、本発明の搬送装置について、図面を参照しながら実施形態に基づいて説明する。なお、図面は搬送装置および搬送装置を構成する部材等を模式的に表したものであり、これらの実際の寸法および寸法比は、図面上の寸法および寸法比と必ずしも一致していない。また、重複説明は適宜省略する。
【0011】
図1は、本発明の実施形態に係る搬送装置10の平面模式図である。図2は、図1に示す搬送装置10をA方向から見た側面模式図である。図3は、図1に示す搬送装置10をB方向から見た側面模式図である。なお、図2および図3では、図1に示す搬送装置10の部材の一部を省略してある。
【0012】
搬送装置10は、支持台Sと、第1アーム12と、第2アーム14と、第3アーム16と、第1ステージ18と、第2ステージ20とを有し、第2ステージ20に設けられた載置部22に載置された搬送物(不図示)を搬送する。支持台S、第1アーム12、第2アーム14、第3アーム16、第1ステージ18、および第2ステージ20は、ステンレスやアルミニウム等の金属から構成されているが、これらの材質は特に限定されない。
【0013】
支持台Sは筐体(不図示)に固定されている。支持台Sに設けられた第1関節24を回転軸として第1アーム12が回転するように、第1アーム12の一端が第1関節24に連結されている。また、第1アーム12の他端に設けられた第2関節26を回転軸として、第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、第2アーム14の一端が第2関節26に連結されている。具体的には、第1関節24と第2関節26は、基準径が2:1の関係で、タイミングベルトまたは歯車等の伝達機構によって、第1アーム12内部で動力を伝えるようになっている。
【0014】
図2および図3に示すように、支持台Sの下部には制御ボックス28が設けられている。制御ボックス28の内部には、第1関節24および第2関節26を回転させる電気モータ等の駆動部材と、駆動部材を駆動する電源等の駆動源と、第1関節24を駆動して第1アーム12が角度θだけ回転する間に、第2関節26を駆動して第2アーム14が角度−2θだけ回転するように制御する制御部等が収納されている(いずれも不図示)。第1アーム12と第2アーム14の回転速度がこのように制御されるので、第1関節24と後述する連結部材30は、搬送装置10を上面から見たときに、同じ直線上で離れたり近付いたりする(図1の矢印L参照)。
【0015】
第2アーム14の他端に設けられた連結部材30によって第3アーム16が第2アーム14に対して固定されるように、第3アーム16の一端が連結部材30に連結されている。また、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)に沿って第1ステージ18が移動するように、第1ステージ18が連結部材30に連結されている。
【0016】
具体的には、図2および図3に示すように、第2アーム14と第3アーム16の間にある連結部材30の部分が、第1ステージ18に形成された孔部(不図示)に挿入されている。第1ステージ18は、支持台Sに設けられた複数段のスライドレール(不図示)によって底面が支持され、連結部材30の移動と同期して、連結部材30の移動方向と同じ方向に移動できるように構成されている。
【0017】
さらに、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)に沿って第2ステージ20が移動するように、第3アーム16の他端に設けられた第3関節40に第2ステージ20が連結されている。このため、第1アーム12の回転によって、第1ステージ18および第2ステージ20が同時に伸縮できる。したがって、搬送距離を長くすることができる。
【0018】
本実施形態では、図1から図3に示すように、第1ステージ18上にガイド部材であるスライドレール42が設けられている。第2ステージ20は、スライドレール42によって底面を支持され、連結部材30の移動と同期して、連結部材30の移動方向と同じ方向に移動できるように構成されている。つまり、第2ステージ20は、スライドレール42に沿って第1ステージ18の上部を移動する。
【0019】
また、第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動するように、第3関節40に第2ステージ20が連結されている。本実施形態では、第2ステージ20は、第2ステージ20に設けられた長孔44を介して、第3関節40に連結されている。第1関節24を回転軸として第1アーム12が回転するとき、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って長手に、長孔44が形成されている。
【0020】
本実施形態では第2アーム14と第3アーム16が連結部材30によって直線状に固定されているため、第1関節24を回転軸として第1アーム12が回転するとき、すなわち、第2関節26を回転軸として第2アーム14が回転するとき、第3関節40も第2関節26を回転軸として回転する。
【0021】
このため、第3関節40に誘導された第2ステージ20が、連結部材30が移動する方向(図1の矢印L参照)と同じ方向に移動すると、搬送装置10を上面から見たときに連結部材30が移動する方向と垂直の方向にも、第3関節40から第2ステージ20に対して力が及ぶ。したがって、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動できることにより、第3関節40から第2ステージ20に対して及ぶこの垂直の方向の力を逃がすことができる。
【0022】
この結果、第2ステージ20からの反作用による支持台Sへの力学的負荷を減らすことができ、支持台Sを筐体に固定する機構のコストダウンが図れる。本実施形態では、長孔44を設けることにより、第3関節40から第2ステージ20に対して及ぶこの垂直の方向の力を逃がすことができる。第3関節40は、第2ステージ20に設けられたスライドレール(不図示)に誘導されて、長孔44内を移動する。なお、長孔44を設けず、スライドレールのみによって、連結部材30が移動する方向(図1の矢印L参照)と垂直方向に沿って、第3関節40が第2ステージ20に対して移動できるようにしても良いし、スライドレール以外の部材を用いても良い。
【0023】
また、本実施形態では、第2関節14と、連結部材30と、第3関節40とが、搬送装置10を上面から見たときに、ほぼ直線上に配置されている。このため、第2アーム14の回転によって第2ステージ20をより遠くに送り出すことができる。この結果、搬送距離を長くすることができる。
【0024】
つぎに、搬送装置10の動作について説明する。まず、第1ステージ18および第2ステージ20が縮んだ状態で、載置部22にガラス基板や基板カセット等の搬送物(不図示)を載せる。このとき、第1ステージ18および第2ステージ20は、完全に縮みきった状態でも良いし、途中まで縮んだ状態でも良い。
【0025】
そして、第1アーム12の回転速度の2倍の逆回転速度で第2アーム14が回転するように、駆動部材、駆動源、および制御部等を第1関節24および第2関節26に作用させて、第1アーム12、第2アーム14、および第3アーム16を動かす。その結果、連結部材30は、搬送装置10を上面から見たときに、直線運動をする(図1の矢印L参照)。
【0026】
このとき、第1ステージ18は、連結部材30の移動と同期して、連結部材30に導かれながら連結部材30の移動方向と同じ方向に直線運動をする(図1の矢印L参照)。さらに、第2ステージ20は、第3関節40に導かれて、スライドレール42に沿って連結部材30の移動方向と同じ方向に、第1ステージ18の上部を直線運動する(図1の矢印L参照)。
【0027】
こうして、第1ステージ18および第2ステージ20が伸びた状態となり、載置部22に載せられたガラス基板や基板カセット等の搬送物(不図示)を載置部22から降ろす。このとき、第1ステージ18および第2ステージ20は、完全に伸びきった状態でも良いし、途中まで伸びた状態でも良い。搬送物を載置部22から降ろす方法としては、載置部22の間から支持部材を上昇させて、載置部22からこの支持部材に搬送物を移す方法や、クレーン等で搬送物を吊り上げた状態で第1ステージ18および第2ステージ20を縮めて、その後搬送物を降ろす方法等が挙げられる。
【0028】
以上、実施形態に基づき、本発明の搬送装置について説明したが、本発明の搬送装置は上述した実施形態に限定されない。例えば、第2アーム14と第3アーム16を一体化しても良い。この場合、一体化したアームの中央付近に柱状突起物を設け、この突起物に第1ステージを連結すれば実施形態の搬送装置と同様の効果が得られる。
【0029】
また、第2ステージ20に設ける長孔は、第1ステージ18および第2ステージ20の伸縮によって第3関節40が動く軌跡を考慮した曲線形状であっても良い。また、アーム、関節、連結部材、およびステージを実施形態の搬送装置にさらに追加して、搬送距離がより長い搬送装置としても良い。
【符号の説明】
【0030】
S 支持台
10 搬送装置
12 第1アーム
14 第2アーム
16 第3アーム
18 第1ステージ
20 第2ステージ
22 載置部
24 第1関節
26 第2関節
30 連結部材
40 第3関節
42 スライドレール
44 長孔
【特許請求の範囲】
【請求項1】
支持台と、第1アームと、第2アームと、第3アームと、第1ステージと、第2ステージとを有し、前記第2ステージに設けられた載置部に載置された搬送物を搬送する搬送装置であって、
前記支持台に設けられた第1関節を回転軸として前記第1アームが回転するように、前記第1アームの一端が前記第1関節に連結され、
前記第1アームの他端に設けられた第2関節を回転軸として、前記第1アームの回転速度の2倍の逆回転速度で前記第2アームが回転するように、前記第2アームの一端が前記第2関節に連結され、
前記第2アームの他端に設けられた連結部材によって前記第3アームが前記第2アームに対して固定されるように、前記第3アームの一端が前記連結部材に連結され、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向に沿って前記第1ステージが移動するように、前記第1ステージが前記連結部材に連結され、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向に沿って前記第2ステージが移動するように、前記第3アームの他端に設けられた第3関節に前記第2ステージが連結されている搬送装置。
【請求項2】
請求項1において、
前記第1関節を回転軸として前記第1アームが回転するとき、前記第2ステージは、前記第1ステージに設けられたガイド部材に沿って第1ステージの上部を移動する搬送装置。
【請求項3】
請求項1または2において、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向と垂直方向に沿って、前記第3関節が前記第2ステージに対して移動するように、前記第3関節に前記第2ステージが連結されている搬送装置。
【請求項4】
請求項1から3のいずれか1項において、
前記第2関節と、前記連結部材と、前記第3関節とが、上面から見たときに、ほぼ直線上に配置されている搬送装置。
【請求項1】
支持台と、第1アームと、第2アームと、第3アームと、第1ステージと、第2ステージとを有し、前記第2ステージに設けられた載置部に載置された搬送物を搬送する搬送装置であって、
前記支持台に設けられた第1関節を回転軸として前記第1アームが回転するように、前記第1アームの一端が前記第1関節に連結され、
前記第1アームの他端に設けられた第2関節を回転軸として、前記第1アームの回転速度の2倍の逆回転速度で前記第2アームが回転するように、前記第2アームの一端が前記第2関節に連結され、
前記第2アームの他端に設けられた連結部材によって前記第3アームが前記第2アームに対して固定されるように、前記第3アームの一端が前記連結部材に連結され、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向に沿って前記第1ステージが移動するように、前記第1ステージが前記連結部材に連結され、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向に沿って前記第2ステージが移動するように、前記第3アームの他端に設けられた第3関節に前記第2ステージが連結されている搬送装置。
【請求項2】
請求項1において、
前記第1関節を回転軸として前記第1アームが回転するとき、前記第2ステージは、前記第1ステージに設けられたガイド部材に沿って第1ステージの上部を移動する搬送装置。
【請求項3】
請求項1または2において、
前記第1関節を回転軸として前記第1アームが回転するとき、前記連結部材が移動する方向と垂直方向に沿って、前記第3関節が前記第2ステージに対して移動するように、前記第3関節に前記第2ステージが連結されている搬送装置。
【請求項4】
請求項1から3のいずれか1項において、
前記第2関節と、前記連結部材と、前記第3関節とが、上面から見たときに、ほぼ直線上に配置されている搬送装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−218144(P2012−218144A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−100118(P2011−100118)
【出願日】平成23年4月11日(2011.4.11)
【出願人】(508022207)コミヤマエレクトロン株式会社 (4)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月11日(2011.4.11)
【出願人】(508022207)コミヤマエレクトロン株式会社 (4)
【Fターム(参考)】
[ Back to top ]