
測位装置
【課題】到来時間差とドップラー周波数差を正しく計算し、干渉局を位置評定することができる測位装置を得る。
【解決手段】正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3とを備える。
【解決手段】正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、衛星に不法電波を送信する未知の地上送信局の位置推定を行う測位装置に関するものである。
【背景技術】
【0002】
従来、地上から衛星へ不法電波を送信する未知の違法電波局の位置を測位する装置がある(例えば、非特許文献1参照)。衛星通信では、多数の通信衛星が静止軌道上に配置されており、その配置間隔は約4度おきと狭く、非常に混み合っているのが現状である。このような状況で、衛星通信では、各地上局が、割り当てられた周波数帯で、特定の衛星に向かって電波を送信(アップリンク)する。
【0003】
衛星側では、地上の多数の送信局から衛星に向けて送信された電波信号を、衛星内のトランスポンダを介して地上へ送り返す(ダウンリンク)。このとき、例えば、通信の目的が日本全域であれば、日本全域をカバーするような広いビームで電波を送り返す。
【0004】
一方、このような通信システムでは、地上局の故障や操作誤りなどが原因で、誤った衛星に電波をアップリンクしてしまう場合がある。更に、違法な電波送信局から、意図的に電波をアップリンクされる場合もある。このような電波送信局を干渉局と呼ぶ。このような状況では、通信が混信してしまうため、何等かの方法で干渉局の電波送信の停止を促す必要がある。
【0005】
しかしながら、地上には無数の送信局が存在し、更に、VSAT(Very Small Aperture Terminal)など、簡単に移動設置可能な送信局も多数存在し、更には、海外の送信局である可能性もあり、干渉局の位置は知ることはできない。特に、故意に違法電波を送信してくるような違法局の場合、当然ながら、その位置は未知である。
【0006】
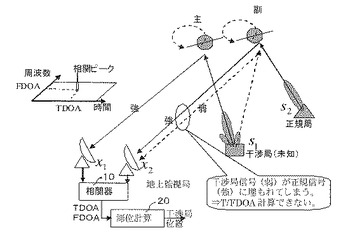
上記の問題に対し、従来技術では、衛星からの電波受信した受信信号を使って未知の位置の干渉局の位置を測位する装置が記されている。図7に宇宙電波監視の測位システムの概要を示す。また、図8に測位装置を示す。この装置では、まず、地上に地上監視局を設置し、衛星からのダウンリンク電波を常時モニタする。ある衛星で干渉電波が発生すると、干渉を主に受けている衛星と隣接する衛星を選択する。
【0007】
一般に、地上送信局が衛星に送信する電波は、送信ビーム制御により特定の衛星に指向して送信される。しかし、アンテナサイドローブなどの漏れ込みによりある程度の空間的広がりを持ち、また、衛星は非常に近接して位置しているため、主衛星に対する電波の電力よりは小さいが、同じ信号源からの電波が隣接する副衛星でも受信されることが多い。これらの計2機の衛星からの電波を地上監視局で受信し、これらの電波の到来時間差(TDOA:Time Difference of Arrival)とドップラー周波数差(FDOA:Frequency Difference of Arrival)を計算する。
【0008】
これらの2衛星は、位置が異なるため、同一電波を2衛星を介して受信すると、受信信号間で到来時間に差が生じる。また、静止衛星とはいえ、地表面に対して若干ではあるが運動し、その運動は異なるため、同一電波を2衛星を介して受信すると、受信信号でドップラー周波数差が生じる。これらがTDOA及びFDOAである。干渉局からの送信信号をs1と呼ぶ。受信信号x1(t)、x2(t)を数式で表すと次式となる。
【0009】
【数1】

【数2】
【0010】
ここで、τ11、τ21は干渉局から各衛星を介して受信される電波の時間遅延、f11、f12は干渉局から各衛星を介して受信される電波の周波数シフト量である。なお、説明を簡単にするために、ここでは、衛星や受信局で生じる時計誤差やローカル周波数シフトは省略する。α11、α12は電波伝搬により生じる、ある位相量及び電力の大きさを意味する複素係数である。衛星#2にアップリンクされる電波は、サイドローブによる漏れこみにより生じるため、衛星#1にアップリンクされる電波に比べ、電力が非常に小さいため、|α21|は|α11|に比べ、非常に小さい。
【0011】
TDOA及びFDOAは、それぞれτ11とτ21の差、及び、f11とf12の差となるわけだが、当然ながらこれらの値は未知である。これらの値を計算するため、相関器3では、以下の受信信号間の相関処理により計算する。デジタル信号処理系では、次式を用いる。
【0012】
【数3】
【0013】
ここで、m:TDOAインデックス、n:FDOAインデックス、k:離散時間インデックス、K:サンプル数である。また、x1(k)=x1(kΔt)、x2(k)=x2(kΔt)であり、Δtはサンプル周期である。この値は次式で与えられる。
【0014】
【数4】
【0015】
ここで、fs(=1/Δt):サンプリング周波数[Hz]、T:観測時間[sec]であり、mとnがTDOA及びFDOAの値をもつとき、相関ピークが得られる。その他の場合は0である。なお、実際には完全無相関で無い限り、0ではない何らかの値をもつ(ノイズフロアと呼ばれる)が、ピーク値に比べて極めて低い。よって、図7に示すように、時間方向と周波数方向の2次元相関処理結果で、2信号間の2次元相関値がもっとも高い時間及び周波数を選択した結果(ピークサーチした結果)がTDOA及びFDOAとなる。
【0016】
【数5】
【0017】
最後に、相関器3で得られたTDOAとFDOAより、地上における違法電波局(干渉局)の3次元位置を評定する。遅延時間差及びドップラー周波数差は、2機の衛星の3次元位置及び速度ベクトルps(i),vs(i),i=1,2,及び、干渉局の3次元位置ベクトルpの情報を用いて次式で表すことができる.
【0018】
【数6】
【数7】
【数8】
【0019】
ここで、cは光速、λは送信波長、peは地球中心の位置、Reは地球の半径である。||・||はノルムで距離を意味する。式(6)は干渉局から2衛星を介して得られる同一電波の到来時間差を表している。同様に式(7)は、干渉局から2衛星を介して得えられる同一電波のドップラー周波数差を表している。式(8)は、地球上にあることを意味する。衛星の位置や速度は衛星の軌道情報から得られるので機知である。よって、未知変数はpのみであり、3次元ベクトルなので未知数は3である。これらの3式の連立方程式をpについて解けば、干渉局の位置を測位できる。なお,実際は種々の誤差をキャンセルするリファレンス局を用いるため式(6)及び式(7)はより複雑になるが、表記を簡単にするため、ここでは省略する。また、式(8)では、地球は球と仮定しているが、実際の地球の形状を考慮し、より精密なモデルを用いても良い。
【先行技術文献】
【非特許文献】
【0020】
【非特許文献1】D. P. haworth, N. G. smith, R. Bardelli and T. Clement,"Interference Localization for Eutelsat Satellites-The FIRst European Transmitter Localization System,"International Journal of Satellite Communications, Vol. 15, 155-183, 1997.
【発明の概要】
【発明が解決しようとする課題】
【0021】
隣接する衛星には、電力は弱いが干渉局s1からの信号が受信されている。このとき、干渉信号が存在する周波数帯には、すでに他の正規局s2が通信を行っている場合がある。例えば、図9に示すような場合である。このとき、受信信号は次式となる。
【0022】
【数9】
【数10】
【0023】
ここで、正規局s2の信号は、正規に通信を行っているのであるから、漏れこみにより受信されている干渉局s1の信号に比べ大電力であり、電力比で数十dB異なることもある。このため、|α21|は、|α22|に比べ、非常に小さい。また、正規局は正規運用しており、電力が干渉局電力に比べて非常に大きいため、混信はしているものの、通信には支障がないのであるから、正規局に対して運用停止を促すこともできない。このような状況では、干渉局信号s1の成分が、大電力の正規局信号s2の成分に埋もれてしまうため、式(3)〜式(5)の相関処理において、相関ピークがノイズフロアに埋もれてしまい、相関ピークを検出できない問題がある。よって、正しいTDOAやFDOAを得られないため、正しく干渉局を位置評定できない。
【0024】
この発明は上述した点に鑑みてなされたもので、いかなる状況下でも正しく到来時間差とドップラー周波数差を計算し、正しく干渉局を位置評定することができる測位装置を得ることを目的とする。
【課題を解決するための手段】
【0025】
この発明に係る測位装置は、正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部と、前記キャンセラ部により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器とを備えたものである。
【発明の効果】
【0026】
この発明によれば、正規信号と干渉信号が混信した受信信号からキャンセラにより大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算することができる。
【図面の簡単な説明】
【0027】
【図1】この発明の実施の形態1に係る測位装置の構成を示すブロック図である。
【図2】図1に示すキャンセラ部2の詳細な構成例を示すブロック図である。
【図3】図1の変形例を示す測位装置の構成を示すブロック図である。
【図4】この発明の実施の形態2に係る正規信号再構成部1の詳細な構成を示すブロック図である。
【図5】この発明の実施の形態3に係る正規信号再構成部1の詳細な構成を示すブロック図である。
【図6】図5の変形例を示す正規信号再構成部1の構成を示すブロック図である。
【図7】宇宙電波監視の測位システムの概要を示す説明図である。
【図8】従来の測位装置の構成を示すブロック図である。
【図9】従来の測位システムにおいて、干渉局の信号が正規信号に埋もれてしまう状態の説明図である。
【発明を実施するための形態】
【0028】
実施の形態1.
この実施の形態1では、正規信号と干渉信号が混信した受信信号x2からキャンセラにより大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算する。また、受信信号に含まれる正規信号成分の電力が干渉局信号の電力に比べて大きいという性質を利用して、誤り訂正などの一連の処理により、干渉局信号による誤りを訂正して正規信号を再構成する。すなわち、受信信号情報のみから正規信号を推定する。
【0029】
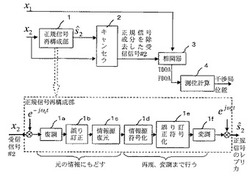
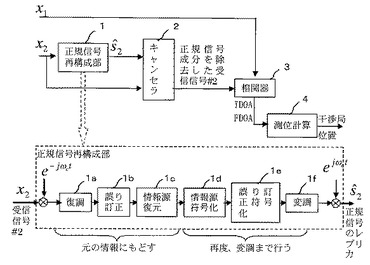
図1は、この発明の実施の形態1に係る測位装置の構成を示すブロック図である。図1に示す測位装置は、受信信号のみから正規信号成分を再構築する正規信号再構成部1と、正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3と、相関器3の出力に基づいて干渉局の位置を評定する測位計算部4とを備えている。
【0030】
次に各構成について具体的に説明する。図1に示すように、観測値x1,x2が得られると、正規信号再構成部1でx2から正規信号のレプリカ
【数11】
を生成する。考え方は、x2に含まれる正規信号成分は、干渉信号に比べ十分電力の大きいデジタル信号であることから、誤り訂正などの処理により、干渉局信号成分の影響による誤り補正して正規信号の元情報を復元できることに基づくものである。
【0031】
そして、その後、再度、変調までの処理を行えば、誤りの取り除かれた正規信号を正しく再構成する。正規信号再構成部1では、x2を入力信号として用い、まず、キャリア周波数分だけ周波数シフトし、ベースバンド信号に変換する。復調部1aは、ASK,PSK,FSK,QAM,OFDM,その他の種々のデジタル変調方式に基づき、離散的に得られた信号値の位相や周波数から、0,1のビット列に変換する。
【0032】
誤り訂正部1bは、ビット列中の誤りを訂正する。誤り訂正とは、0,1が反転してしまい、誤ったビット列が得られている状態から、それらの誤りを正しく修正し、正しいビット列を得るものである。情報源復元部1cは、ビット列から、元の情報を復元する部である。元の情報とは、音声や画像など、通信の目的により異なる。これと反対に、情報源符号化部1dは、音声や画像などの元の情報をビット列に変換する部である。
【0033】
誤り訂正符号部1eは、ビットの周期性や冗長性を持たせるなどして、受信側でビット誤りが可能とするようなビット列を生成する部である。変調部1fは、ビット列を、ASK,PSK,FSK,QAM,OFDM,その他の種々のデジタル変調方式により、デジタル信号に変換する部である。そして最後に、キャリア周波数分だけ周波数変換を行うことにより、最終的な正規信号レプリカ
【数12】
を生成する。
【0034】
次に、キャンセラ部2において、再構成された正規信号
【数13】
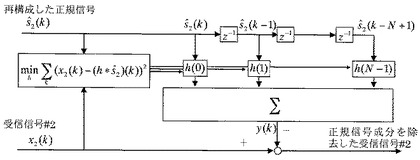
により、x2から、正規信号成分を取り除くことにより、干渉信号成分のみを出力する。キャンセラ部2は、例えば、図2に示したものが考えられる。但し、種々のキャンセラを用いることができるので、これに限ったものではない。
【0035】
以下、キャンセラを説明する。
【数14】
により、x2から正規局信号成分を除去する。正規局信号の送信から受信までの伝達関数をFIR表現し、受信信号x2と
【数15】
との誤差が最小となるような伝達関数を求める。
【0036】
【数16】
【数17】
【数18】
【0037】
ここで、hは伝達関数のFIR近似係数、Nはタップ係数の数、Kはサンプル数、yは伝達関数hを介して得られる
【数19】
の受信信号である。受信信号x2と
【数20】
との誤差が最小となるように、以下の最適化問題を解く。
【0038】
【数21】
【0039】
上記最適化問題の解は次式となる。
【0040】
【数22】
【数23】
【数24】
【数25】
【0041】
このようにして得られたhより、式(13)でy(k)を計算し、x2(k)から除算(x2(k)−y(k))すれば、正規信号成分を除去した受信信号#2が得られる。
【0042】
最後に、相関器3で、x1と、干渉局成分を取り除かれたx2との間で相関演算処理を行えば、正しくTDOA及びFDOAを計算することができる。そして、最後に、測位計算部4で測位計算すれば、干渉局の位置を評定することが可能となる。
【0043】
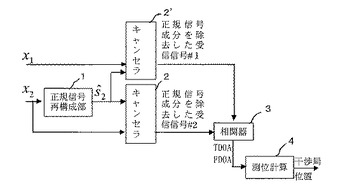
なお、x1に正規信号成分が含まれる場合もx2の場合と同様に、図3のように、正規信号再構成部1で得られた
【数26】
を用いて、x2側と同様にキャンセラ部2’でx1に含まれる正規信号成分を取り除けばよい。
【0044】
以上のように、正規信号と干渉信号が混信したx2からキャンセラ部2により大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算できる。また、受信信号に含まれる正規信号成分の電力が干渉局信号の電力に比べて大きいという性質を利用して、誤り訂正などの一連の処理により、干渉局信号による誤りを訂正して正規信号を再構成できる。すなわち、受信信号情報のみから正規信号を推定できる。
【0045】
実施の形態2.
宇宙電波監視では、電波を監視しているだけなので、一般の通信システムと異なり、変調方式、誤り訂正方式、情報源符号化方式などは未知である。このため、これらの方式を推定する装置部を追加する。こうすることにより、正規信号の性質が全く未知な状況においても、正しく正規信号のレプリカを生成することが可能となる。
【0046】
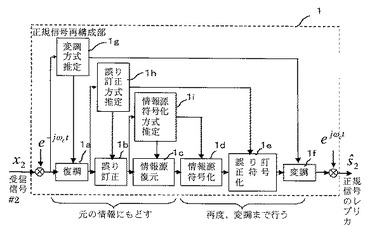
図4は、実施の形態2に係る正規信号再構成部1の詳細な構成を示すブロック図である。図4に示す実施の形態2に係る正規信号再構成部1において、x2が得られると、まず、受信信号をベースバンド信号に変換する。次に、変調方式推定部1gでは、ベースバンド信号から、正規信号の変調方式を推定する。正規信号の電力の方が十分高いため、変調方式の推定が可能である。変調方式が推定されると、復調部1aでは、推定方式に基づきベースバンド信号の復調を行い、ビット列を出力する。
【0047】
次に、誤り訂正方式推定部1hでは、復調部1aからの出力であるビット列に基づき、誤り訂正方式の推定を行う。誤り訂正方式が決定されると、誤り訂正部1bでは、推定方式に基づき誤りの訂正を行い、誤り訂正されたビット列を出力する。次に、情報源符号化方式推定部1iでは、誤り訂正されたビット列から、元の情報の符号化方式を推定する。情報源復元部1cでは、得られた情報源符号化方式に基づき、情報源の復元を行う。
【0048】
これらの推定方式結果は、それぞれ情報源符号化部1d、誤り訂正符号部1e、変調部1fにも伝えられる。そして、情報源符号化部1dでは、情報源符号化方式推定部1iの結果に基づき符号化を行い、誤り訂正符号化部1eでは、誤り訂正方式推定部1hの結果に基づき誤り訂正符号化を行い、変調部1fでは、変調方式推定部1gの結果に基づき変調を行う。最後に、元の周波数に変換して、正規信号のレプリカ
【数27】
を得る。
【0049】
以上のように、宇宙電波監視では、電波を監視しているだけなので、一般の通信システムと異なり、変調方式、誤り訂正方式、情報源符号化方式などは未知である。このため、これらの方式を推定する装置部を追加する。こうすることにより、正規信号の性質が全く未知な状況においても、正しく正規信号のレプリカを生成することが可能となる。
【0050】
実施の形態3.
この実施の形態3では、種々の推定方式が得られない場合や、実施することによる効果が十分でない場合、誤り訂正までにしておく、復調までにしておくなど、種々のパターンを用いる。こうすることより、効率的に正規信号を再構成することが可能となる。
【0051】
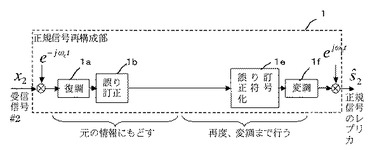
図5は、実施の形態3に係る正規信号再構成部1の詳細な構成を示すブロック図である。図5に示す実施の形態3に係る正規信号再構成部1に示すように、情報源復元することの効果が十分でなかったり、情報源符号化方式が得られなかったりする場合を考え、x2が得られると、ベースバンド信号に変換後、復調部1aによる復調及び誤り訂正部1bによる誤り訂正までを行い、再度、誤り訂正符号化部1eによる誤り訂正及び変調部1fによる変調を行う。最後に、元の周波数に変換することにより、
【数28】
を得る。
【0052】
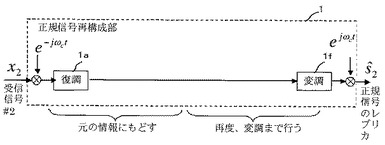
また、図6のような正規信号再構成部1の構成も可能である。誤り訂正までやることの効果が十分でなかったり、誤り訂正方式が得られなかったりする場合を考え、x2が得られると、ベースバンド信号に変換後、再度、復調部1aによる復調までを行い、変調部1fにより変調する。最後に、元の周波数に変換することにより
【数29】
を得る。
【0053】
以上のように、種々の推定方式が得られない場合や、実施することによる効果が十分でない場合、誤り訂正までにしておく、復調までにしておくなど、種々のパターンを用いる。こうすることより、効率的に正規信号を再構成することが可能となる。
【0054】
実施の形態4.
実施の形態1〜3を組み合わせることも可能である。すなわち、全部推定するのではなく一部だけ推定部を加えたり、必要な部分まで情報を戻したりなど、さまざまな組み合わせが可能である。今までの説明から明らかであるので、詳細説明は省略する。
【符号の説明】
【0055】
1 正規信号再構成部、1a 復調部、1b 誤り訂正部、1c 情報源復元部、1d 情報源符号化部、1e 誤り訂正符号部、1f 変調部、1g 変調方式推定部、1h 誤り訂正方式推定部、1i 情報源符号化方式推定部、2、2’ キャンセラ部、3 相関器、4 測位計算部。
【技術分野】
【0001】
この発明は、衛星に不法電波を送信する未知の地上送信局の位置推定を行う測位装置に関するものである。
【背景技術】
【0002】
従来、地上から衛星へ不法電波を送信する未知の違法電波局の位置を測位する装置がある(例えば、非特許文献1参照)。衛星通信では、多数の通信衛星が静止軌道上に配置されており、その配置間隔は約4度おきと狭く、非常に混み合っているのが現状である。このような状況で、衛星通信では、各地上局が、割り当てられた周波数帯で、特定の衛星に向かって電波を送信(アップリンク)する。
【0003】
衛星側では、地上の多数の送信局から衛星に向けて送信された電波信号を、衛星内のトランスポンダを介して地上へ送り返す(ダウンリンク)。このとき、例えば、通信の目的が日本全域であれば、日本全域をカバーするような広いビームで電波を送り返す。
【0004】
一方、このような通信システムでは、地上局の故障や操作誤りなどが原因で、誤った衛星に電波をアップリンクしてしまう場合がある。更に、違法な電波送信局から、意図的に電波をアップリンクされる場合もある。このような電波送信局を干渉局と呼ぶ。このような状況では、通信が混信してしまうため、何等かの方法で干渉局の電波送信の停止を促す必要がある。
【0005】
しかしながら、地上には無数の送信局が存在し、更に、VSAT(Very Small Aperture Terminal)など、簡単に移動設置可能な送信局も多数存在し、更には、海外の送信局である可能性もあり、干渉局の位置は知ることはできない。特に、故意に違法電波を送信してくるような違法局の場合、当然ながら、その位置は未知である。
【0006】
上記の問題に対し、従来技術では、衛星からの電波受信した受信信号を使って未知の位置の干渉局の位置を測位する装置が記されている。図7に宇宙電波監視の測位システムの概要を示す。また、図8に測位装置を示す。この装置では、まず、地上に地上監視局を設置し、衛星からのダウンリンク電波を常時モニタする。ある衛星で干渉電波が発生すると、干渉を主に受けている衛星と隣接する衛星を選択する。
【0007】
一般に、地上送信局が衛星に送信する電波は、送信ビーム制御により特定の衛星に指向して送信される。しかし、アンテナサイドローブなどの漏れ込みによりある程度の空間的広がりを持ち、また、衛星は非常に近接して位置しているため、主衛星に対する電波の電力よりは小さいが、同じ信号源からの電波が隣接する副衛星でも受信されることが多い。これらの計2機の衛星からの電波を地上監視局で受信し、これらの電波の到来時間差(TDOA:Time Difference of Arrival)とドップラー周波数差(FDOA:Frequency Difference of Arrival)を計算する。
【0008】
これらの2衛星は、位置が異なるため、同一電波を2衛星を介して受信すると、受信信号間で到来時間に差が生じる。また、静止衛星とはいえ、地表面に対して若干ではあるが運動し、その運動は異なるため、同一電波を2衛星を介して受信すると、受信信号でドップラー周波数差が生じる。これらがTDOA及びFDOAである。干渉局からの送信信号をs1と呼ぶ。受信信号x1(t)、x2(t)を数式で表すと次式となる。
【0009】
【数1】
【数2】
【0010】
ここで、τ11、τ21は干渉局から各衛星を介して受信される電波の時間遅延、f11、f12は干渉局から各衛星を介して受信される電波の周波数シフト量である。なお、説明を簡単にするために、ここでは、衛星や受信局で生じる時計誤差やローカル周波数シフトは省略する。α11、α12は電波伝搬により生じる、ある位相量及び電力の大きさを意味する複素係数である。衛星#2にアップリンクされる電波は、サイドローブによる漏れこみにより生じるため、衛星#1にアップリンクされる電波に比べ、電力が非常に小さいため、|α21|は|α11|に比べ、非常に小さい。
【0011】
TDOA及びFDOAは、それぞれτ11とτ21の差、及び、f11とf12の差となるわけだが、当然ながらこれらの値は未知である。これらの値を計算するため、相関器3では、以下の受信信号間の相関処理により計算する。デジタル信号処理系では、次式を用いる。
【0012】
【数3】
【0013】
ここで、m:TDOAインデックス、n:FDOAインデックス、k:離散時間インデックス、K:サンプル数である。また、x1(k)=x1(kΔt)、x2(k)=x2(kΔt)であり、Δtはサンプル周期である。この値は次式で与えられる。
【0014】
【数4】
【0015】
ここで、fs(=1/Δt):サンプリング周波数[Hz]、T:観測時間[sec]であり、mとnがTDOA及びFDOAの値をもつとき、相関ピークが得られる。その他の場合は0である。なお、実際には完全無相関で無い限り、0ではない何らかの値をもつ(ノイズフロアと呼ばれる)が、ピーク値に比べて極めて低い。よって、図7に示すように、時間方向と周波数方向の2次元相関処理結果で、2信号間の2次元相関値がもっとも高い時間及び周波数を選択した結果(ピークサーチした結果)がTDOA及びFDOAとなる。
【0016】
【数5】
【0017】
最後に、相関器3で得られたTDOAとFDOAより、地上における違法電波局(干渉局)の3次元位置を評定する。遅延時間差及びドップラー周波数差は、2機の衛星の3次元位置及び速度ベクトルps(i),vs(i),i=1,2,及び、干渉局の3次元位置ベクトルpの情報を用いて次式で表すことができる.
【0018】
【数6】
【数7】
【数8】
【0019】
ここで、cは光速、λは送信波長、peは地球中心の位置、Reは地球の半径である。||・||はノルムで距離を意味する。式(6)は干渉局から2衛星を介して得られる同一電波の到来時間差を表している。同様に式(7)は、干渉局から2衛星を介して得えられる同一電波のドップラー周波数差を表している。式(8)は、地球上にあることを意味する。衛星の位置や速度は衛星の軌道情報から得られるので機知である。よって、未知変数はpのみであり、3次元ベクトルなので未知数は3である。これらの3式の連立方程式をpについて解けば、干渉局の位置を測位できる。なお,実際は種々の誤差をキャンセルするリファレンス局を用いるため式(6)及び式(7)はより複雑になるが、表記を簡単にするため、ここでは省略する。また、式(8)では、地球は球と仮定しているが、実際の地球の形状を考慮し、より精密なモデルを用いても良い。
【先行技術文献】
【非特許文献】
【0020】
【非特許文献1】D. P. haworth, N. G. smith, R. Bardelli and T. Clement,"Interference Localization for Eutelsat Satellites-The FIRst European Transmitter Localization System,"International Journal of Satellite Communications, Vol. 15, 155-183, 1997.
【発明の概要】
【発明が解決しようとする課題】
【0021】
隣接する衛星には、電力は弱いが干渉局s1からの信号が受信されている。このとき、干渉信号が存在する周波数帯には、すでに他の正規局s2が通信を行っている場合がある。例えば、図9に示すような場合である。このとき、受信信号は次式となる。
【0022】
【数9】
【数10】
【0023】
ここで、正規局s2の信号は、正規に通信を行っているのであるから、漏れこみにより受信されている干渉局s1の信号に比べ大電力であり、電力比で数十dB異なることもある。このため、|α21|は、|α22|に比べ、非常に小さい。また、正規局は正規運用しており、電力が干渉局電力に比べて非常に大きいため、混信はしているものの、通信には支障がないのであるから、正規局に対して運用停止を促すこともできない。このような状況では、干渉局信号s1の成分が、大電力の正規局信号s2の成分に埋もれてしまうため、式(3)〜式(5)の相関処理において、相関ピークがノイズフロアに埋もれてしまい、相関ピークを検出できない問題がある。よって、正しいTDOAやFDOAを得られないため、正しく干渉局を位置評定できない。
【0024】
この発明は上述した点に鑑みてなされたもので、いかなる状況下でも正しく到来時間差とドップラー周波数差を計算し、正しく干渉局を位置評定することができる測位装置を得ることを目的とする。
【課題を解決するための手段】
【0025】
この発明に係る測位装置は、正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部と、前記キャンセラ部により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器とを備えたものである。
【発明の効果】
【0026】
この発明によれば、正規信号と干渉信号が混信した受信信号からキャンセラにより大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算することができる。
【図面の簡単な説明】
【0027】
【図1】この発明の実施の形態1に係る測位装置の構成を示すブロック図である。
【図2】図1に示すキャンセラ部2の詳細な構成例を示すブロック図である。
【図3】図1の変形例を示す測位装置の構成を示すブロック図である。
【図4】この発明の実施の形態2に係る正規信号再構成部1の詳細な構成を示すブロック図である。
【図5】この発明の実施の形態3に係る正規信号再構成部1の詳細な構成を示すブロック図である。
【図6】図5の変形例を示す正規信号再構成部1の構成を示すブロック図である。
【図7】宇宙電波監視の測位システムの概要を示す説明図である。
【図8】従来の測位装置の構成を示すブロック図である。
【図9】従来の測位システムにおいて、干渉局の信号が正規信号に埋もれてしまう状態の説明図である。
【発明を実施するための形態】
【0028】
実施の形態1.
この実施の形態1では、正規信号と干渉信号が混信した受信信号x2からキャンセラにより大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算する。また、受信信号に含まれる正規信号成分の電力が干渉局信号の電力に比べて大きいという性質を利用して、誤り訂正などの一連の処理により、干渉局信号による誤りを訂正して正規信号を再構成する。すなわち、受信信号情報のみから正規信号を推定する。
【0029】
図1は、この発明の実施の形態1に係る測位装置の構成を示すブロック図である。図1に示す測位装置は、受信信号のみから正規信号成分を再構築する正規信号再構成部1と、正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部2と、キャンセラ部2により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器3と、相関器3の出力に基づいて干渉局の位置を評定する測位計算部4とを備えている。
【0030】
次に各構成について具体的に説明する。図1に示すように、観測値x1,x2が得られると、正規信号再構成部1でx2から正規信号のレプリカ
【数11】
を生成する。考え方は、x2に含まれる正規信号成分は、干渉信号に比べ十分電力の大きいデジタル信号であることから、誤り訂正などの処理により、干渉局信号成分の影響による誤り補正して正規信号の元情報を復元できることに基づくものである。
【0031】
そして、その後、再度、変調までの処理を行えば、誤りの取り除かれた正規信号を正しく再構成する。正規信号再構成部1では、x2を入力信号として用い、まず、キャリア周波数分だけ周波数シフトし、ベースバンド信号に変換する。復調部1aは、ASK,PSK,FSK,QAM,OFDM,その他の種々のデジタル変調方式に基づき、離散的に得られた信号値の位相や周波数から、0,1のビット列に変換する。
【0032】
誤り訂正部1bは、ビット列中の誤りを訂正する。誤り訂正とは、0,1が反転してしまい、誤ったビット列が得られている状態から、それらの誤りを正しく修正し、正しいビット列を得るものである。情報源復元部1cは、ビット列から、元の情報を復元する部である。元の情報とは、音声や画像など、通信の目的により異なる。これと反対に、情報源符号化部1dは、音声や画像などの元の情報をビット列に変換する部である。
【0033】
誤り訂正符号部1eは、ビットの周期性や冗長性を持たせるなどして、受信側でビット誤りが可能とするようなビット列を生成する部である。変調部1fは、ビット列を、ASK,PSK,FSK,QAM,OFDM,その他の種々のデジタル変調方式により、デジタル信号に変換する部である。そして最後に、キャリア周波数分だけ周波数変換を行うことにより、最終的な正規信号レプリカ
【数12】
を生成する。
【0034】
次に、キャンセラ部2において、再構成された正規信号
【数13】
により、x2から、正規信号成分を取り除くことにより、干渉信号成分のみを出力する。キャンセラ部2は、例えば、図2に示したものが考えられる。但し、種々のキャンセラを用いることができるので、これに限ったものではない。
【0035】
以下、キャンセラを説明する。
【数14】
により、x2から正規局信号成分を除去する。正規局信号の送信から受信までの伝達関数をFIR表現し、受信信号x2と
【数15】
との誤差が最小となるような伝達関数を求める。
【0036】
【数16】
【数17】
【数18】
【0037】
ここで、hは伝達関数のFIR近似係数、Nはタップ係数の数、Kはサンプル数、yは伝達関数hを介して得られる
【数19】
の受信信号である。受信信号x2と
【数20】
との誤差が最小となるように、以下の最適化問題を解く。
【0038】
【数21】
【0039】
上記最適化問題の解は次式となる。
【0040】
【数22】
【数23】
【数24】
【数25】
【0041】
このようにして得られたhより、式(13)でy(k)を計算し、x2(k)から除算(x2(k)−y(k))すれば、正規信号成分を除去した受信信号#2が得られる。
【0042】
最後に、相関器3で、x1と、干渉局成分を取り除かれたx2との間で相関演算処理を行えば、正しくTDOA及びFDOAを計算することができる。そして、最後に、測位計算部4で測位計算すれば、干渉局の位置を評定することが可能となる。
【0043】
なお、x1に正規信号成分が含まれる場合もx2の場合と同様に、図3のように、正規信号再構成部1で得られた
【数26】
を用いて、x2側と同様にキャンセラ部2’でx1に含まれる正規信号成分を取り除けばよい。
【0044】
以上のように、正規信号と干渉信号が混信したx2からキャンセラ部2により大電力の正規信号を取り除いてから相関処理を行うことにより、正しく到来時間差及びドップラー周波数差を計算できる。また、受信信号に含まれる正規信号成分の電力が干渉局信号の電力に比べて大きいという性質を利用して、誤り訂正などの一連の処理により、干渉局信号による誤りを訂正して正規信号を再構成できる。すなわち、受信信号情報のみから正規信号を推定できる。
【0045】
実施の形態2.
宇宙電波監視では、電波を監視しているだけなので、一般の通信システムと異なり、変調方式、誤り訂正方式、情報源符号化方式などは未知である。このため、これらの方式を推定する装置部を追加する。こうすることにより、正規信号の性質が全く未知な状況においても、正しく正規信号のレプリカを生成することが可能となる。
【0046】
図4は、実施の形態2に係る正規信号再構成部1の詳細な構成を示すブロック図である。図4に示す実施の形態2に係る正規信号再構成部1において、x2が得られると、まず、受信信号をベースバンド信号に変換する。次に、変調方式推定部1gでは、ベースバンド信号から、正規信号の変調方式を推定する。正規信号の電力の方が十分高いため、変調方式の推定が可能である。変調方式が推定されると、復調部1aでは、推定方式に基づきベースバンド信号の復調を行い、ビット列を出力する。
【0047】
次に、誤り訂正方式推定部1hでは、復調部1aからの出力であるビット列に基づき、誤り訂正方式の推定を行う。誤り訂正方式が決定されると、誤り訂正部1bでは、推定方式に基づき誤りの訂正を行い、誤り訂正されたビット列を出力する。次に、情報源符号化方式推定部1iでは、誤り訂正されたビット列から、元の情報の符号化方式を推定する。情報源復元部1cでは、得られた情報源符号化方式に基づき、情報源の復元を行う。
【0048】
これらの推定方式結果は、それぞれ情報源符号化部1d、誤り訂正符号部1e、変調部1fにも伝えられる。そして、情報源符号化部1dでは、情報源符号化方式推定部1iの結果に基づき符号化を行い、誤り訂正符号化部1eでは、誤り訂正方式推定部1hの結果に基づき誤り訂正符号化を行い、変調部1fでは、変調方式推定部1gの結果に基づき変調を行う。最後に、元の周波数に変換して、正規信号のレプリカ
【数27】
を得る。
【0049】
以上のように、宇宙電波監視では、電波を監視しているだけなので、一般の通信システムと異なり、変調方式、誤り訂正方式、情報源符号化方式などは未知である。このため、これらの方式を推定する装置部を追加する。こうすることにより、正規信号の性質が全く未知な状況においても、正しく正規信号のレプリカを生成することが可能となる。
【0050】
実施の形態3.
この実施の形態3では、種々の推定方式が得られない場合や、実施することによる効果が十分でない場合、誤り訂正までにしておく、復調までにしておくなど、種々のパターンを用いる。こうすることより、効率的に正規信号を再構成することが可能となる。
【0051】
図5は、実施の形態3に係る正規信号再構成部1の詳細な構成を示すブロック図である。図5に示す実施の形態3に係る正規信号再構成部1に示すように、情報源復元することの効果が十分でなかったり、情報源符号化方式が得られなかったりする場合を考え、x2が得られると、ベースバンド信号に変換後、復調部1aによる復調及び誤り訂正部1bによる誤り訂正までを行い、再度、誤り訂正符号化部1eによる誤り訂正及び変調部1fによる変調を行う。最後に、元の周波数に変換することにより、
【数28】
を得る。
【0052】
また、図6のような正規信号再構成部1の構成も可能である。誤り訂正までやることの効果が十分でなかったり、誤り訂正方式が得られなかったりする場合を考え、x2が得られると、ベースバンド信号に変換後、再度、復調部1aによる復調までを行い、変調部1fにより変調する。最後に、元の周波数に変換することにより
【数29】
を得る。
【0053】
以上のように、種々の推定方式が得られない場合や、実施することによる効果が十分でない場合、誤り訂正までにしておく、復調までにしておくなど、種々のパターンを用いる。こうすることより、効率的に正規信号を再構成することが可能となる。
【0054】
実施の形態4.
実施の形態1〜3を組み合わせることも可能である。すなわち、全部推定するのではなく一部だけ推定部を加えたり、必要な部分まで情報を戻したりなど、さまざまな組み合わせが可能である。今までの説明から明らかであるので、詳細説明は省略する。
【符号の説明】
【0055】
1 正規信号再構成部、1a 復調部、1b 誤り訂正部、1c 情報源復元部、1d 情報源符号化部、1e 誤り訂正符号部、1f 変調部、1g 変調方式推定部、1h 誤り訂正方式推定部、1i 情報源符号化方式推定部、2、2’ キャンセラ部、3 相関器、4 測位計算部。
【特許請求の範囲】
【請求項1】
正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部と、
前記キャンセラ部により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器と
を備えた測位装置。
【請求項2】
請求項1に記載の測位装置において、
受信信号のみから前記正規信号成分を再構築する正規信号再構成部をさらに備えた
ことを特徴とする測位装置。
【請求項3】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調、誤り訂正部による誤り訂正、情報源復元部よる情報源復元までを行って正規信号の元情報を復元し、再度、情報源符号化部による情報源符号化、誤り訂正符号化部による誤り訂正符号化、変調部による変調まで行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【請求項4】
請求項3に記載の測位装置において、
受信信号に基づいて正規信号の変調方式を推定する変調方式推定部をさらに備え、
前記復調部は、前記変調方式推定部による推定結果に基づいて復調を行い、
前記変調部は、前記変調方式推定部による推定結果に基づいての結果に基づいて変調を行う
ことを特徴とする測位装置。
【請求項5】
請求項3または4に記載の測位装置において、
前記復調部からの出力に基づいて誤り訂正方式の推定を行う誤り訂正方式推定部をさらに備え、
前記誤り訂正部は、前記誤り訂正方式推定部による推定結果に基づいて誤りの訂正を行い、
前記誤り訂正符号化部は、前記誤り訂正方式推定部による推定結果に基づいて誤り訂正符号化を行う
ことを特徴とする測位装置。
【請求項6】
請求項3から5までのいずれか1項に記載の測位装置において、
前記誤り訂正部からの出力に基づいて元の情報の符号化方式の推定を行う情報源符号化方式推定部をさらに備え、
前記情報源復元部は、前記情報源符号化方式推定部による推定結果に基づいて情報源の復元を行い、
前記情報源符号化部は、前記情報源符号化方式推定部による推定結果に基づいて符号化を行う
ことを特徴とする測位装置。
【請求項7】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調、誤り訂正部による誤り訂正までを行い、再度、誤り訂正符号化部による誤り符号化、変調部による変調を行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【請求項8】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調を行い、再度、変調部による変調を行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【請求項1】
正規信号成分の情報を用いて受信信号に含まれる正規信号成分を除去するキャンセラ部と、
前記キャンセラ部により正規信号成分を除去した受信信号と当該受信信号とは位置の異なる衛星を介して同一電波を受信した他の受信信号との受信信号間の相関処理により干渉局の到来時間差及びドップラー周波数差を計算する相関器と
を備えた測位装置。
【請求項2】
請求項1に記載の測位装置において、
受信信号のみから前記正規信号成分を再構築する正規信号再構成部をさらに備えた
ことを特徴とする測位装置。
【請求項3】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調、誤り訂正部による誤り訂正、情報源復元部よる情報源復元までを行って正規信号の元情報を復元し、再度、情報源符号化部による情報源符号化、誤り訂正符号化部による誤り訂正符号化、変調部による変調まで行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【請求項4】
請求項3に記載の測位装置において、
受信信号に基づいて正規信号の変調方式を推定する変調方式推定部をさらに備え、
前記復調部は、前記変調方式推定部による推定結果に基づいて復調を行い、
前記変調部は、前記変調方式推定部による推定結果に基づいての結果に基づいて変調を行う
ことを特徴とする測位装置。
【請求項5】
請求項3または4に記載の測位装置において、
前記復調部からの出力に基づいて誤り訂正方式の推定を行う誤り訂正方式推定部をさらに備え、
前記誤り訂正部は、前記誤り訂正方式推定部による推定結果に基づいて誤りの訂正を行い、
前記誤り訂正符号化部は、前記誤り訂正方式推定部による推定結果に基づいて誤り訂正符号化を行う
ことを特徴とする測位装置。
【請求項6】
請求項3から5までのいずれか1項に記載の測位装置において、
前記誤り訂正部からの出力に基づいて元の情報の符号化方式の推定を行う情報源符号化方式推定部をさらに備え、
前記情報源復元部は、前記情報源符号化方式推定部による推定結果に基づいて情報源の復元を行い、
前記情報源符号化部は、前記情報源符号化方式推定部による推定結果に基づいて符号化を行う
ことを特徴とする測位装置。
【請求項7】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調、誤り訂正部による誤り訂正までを行い、再度、誤り訂正符号化部による誤り符号化、変調部による変調を行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【請求項8】
請求項2に記載の測位装置において、
前記正規信号再構成部は、受信信号から、復調部による復調を行い、再度、変調部による変調を行うことにより、正規信号を再構築する
ことを特徴とする測位装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−256022(P2010−256022A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−102829(P2009−102829)
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]