
組織標本のハンドリングおよび包埋を自動化する機器および方法
ミクロトームにより切片化可能な支持体上に収容された組織標本(210)をハンドリングし包埋する自動機械(10)を提供する。この機械(10)は、組織包埋操作の前に、ミクロトームにより切片化可能な複数の支持体(150a)を保持するように構成された入力部材(100)を含む。出力部材(32a〜32d)は、組織包埋操作の後で、ミクロトームにより切片化可能な複数の支持体(150a)を保持するように構成される。冷却ユニット(80)は、組織包埋操作の中に、ミクロトームにより切片化可能な支持体(150a)の少なくとも1つを保持するように構成される。移動用の電動キャリアアセンブリ(40)が取り付けられ、ミクロトームにより切片化可能な支持体(150a)の少なくとも1つを保持するように構成される。キャリアアセンブリ(40)は、支持体(150a)を、入力部材(100)から冷却ユニット(80)に、最後に出力部材(32a〜32d)に移動させる。分注装置(212)は、包埋操作中に、ミクロトームにより切片化可能な支持体(150a)と、ミクロトームにより切片化可能な支持体(150a)によって担持された少なくとも1つの組織標本(210)の上に包埋材料(205)を分注する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、生検分析用の組織標本をハンドリングし包埋する機器および方法に関し、より詳細には、このような標本のハンドリングおよび包埋を自動化して行う機器および方法に関する。
【背景技術】
【0002】
様々な組織の疾患および状態を正確に診断するために、医療従事者は、患者の身体から1つまたは複数の組織標本を取り出さなければならない。身体から組織を採取するこの工程は、生検として知られている。1つまたは複数の組織標本が取り出され、病理検査室に送られると、この組織は、組織学技師、および最終的には病理学者によって実施される一連の手順を経て診断されることになる。本発明は一般に、病理学者が顕微鏡下で分析することがある1つまたは複数の組織標本をスライドの形で準備するために、組織学技師によって通常実施される手順に関するものである。
【0003】
本明細書全体を通じて単数形の「標本」という用語を用いるが、この用語は、「複数の標本」という複数形も同様に含むことを理解されたい。患者の身体から組織標本が取り出されると、この組織標本は典型的には、組織固定溶液を収容する試料容器中に置かれ、次いで、この容器は病理検査室に移される。この組織は、病理検査室では「グロスイン」として知られる工程にかけられることになる。この工程中に、組織学技師は、容器から組織標本を回収し、典型的には、この組織を組織処理に適切なサイズに切断し、個々の標本を適切に寸法設定された小型の組織用プラスチックカセット内に置き、各カセットに追跡番号を割り当てる。次いで、これらの追跡番号を検査室で使用する追跡システムに記録する。単に断片であり得る最も小さい組織標本用のカセットは、側面および底面に微細なメッシュ状の開口を有する。極めて小さい組織標本を伴う他の状況では、これらの標本を、ティーバッグに似たバッグ内に置き、これら最小の組織標本がなくなることを防ぐ。比較的大きな組織標本は、いくらか大型のスロット開口を有するカセット内に置く。この場合も、これらの開口は、カセット内の組織標本よりも小さい。
【0004】
次いで、これらのカセットをステンレス綱製の穴あきバスケット内に置き、多くの場合一晩中、組織処理機にかける。この機械は、真空、熱、および化学物質の組合せを使用して間質液を除去する。組織標本からこれらの液を除去した後で、この処理機は、この組織標本を溶融パラフィン浴に浸して、組織内の隙間をパラフィンで置き換える。次いで、組織学技師は、機械からバスケットを取り出し、個々の組織カセットを取り出す。溶融パラフィン溜めおよび分注器を有する包埋ステーションで、組織学技師は、各カセットから組織を個々に取り出す。組織学技師は、組織用カセットとほぼ同じサイズで、溶融パラフィンが部分的に充填されたステンレス綱製のベースモールド内に、組織のタイプに基づき、組織標本の向きに注意して入れなければならない。次いで、この溶融パラフィンを、TEC(熱電式冷却器)とし得る冷却プレート上で急速に冷却させ、パラフィンを部分的に凝固させ、それによって、正しい向きで組織標本を保持する。その後、カセットをベースモールドの上面に置き、カセットの上部開口を通してベースモールド内にパラフィンを注ぐ。この手順のこの時点で、カセットの機能が、組織保持コンポーネントから、凝固したワックスまたはパラフィンから削りくずを取る際に後で使用する固定化デバイスに変わる。このベースモールドを、溶融パラフィンがすべて凝固するまで冷却し、組織学技師は、包埋パラフィンのブロックからステンレス綱製のベースモールドを取り出す。こうすると、組織用プラスチックカセットが反対側にある状態で、組織標本が矩形のパラフィンブロック内に包埋される。組織処理機の場合と同様に、この包埋工程はバッチで実施され、この工程中に、平均的な組織学技師は、1時間当たり約40〜60個のカセットを包埋し得る。
【0005】
このとき、包埋された組織標本を含む硬化したパラフィンブロックは、顕微鏡スライド上に配置するために極めて薄い切片にスライスする準備が整っている。このスライス作業は、ミクロトームとして知られる装置で実現される。組織学技師は、包埋された組織ブロックを塊で、包埋されたプラスチックカセットを有するほうのブロック面を受けるように寸法設定されているミクロトーム上に載せる。次いで、組織学技師は、プラスチックカセット表面の反対側に包埋された組織標本を含むパラフィンブロックのスライス処理を開始することができる。これにより、パラフィン中に包埋された組織のリボン状の個々のスライスが得られる。ミクロトームの動作が正常に行われると、個々のスライスは互いにくっつく。その後、これらの極めて薄いリボン状のスライスを水浴中に浮かべ、このスライスの下に、ガラススライドを注意深く置く。このとき、このスライスは、薄く切片化された組織標本がこのスライス内に包埋された状態で、スライドの上面に付着する。
【0006】
組織学技師により組織標本から十分な数のスライドが得られると、これらのスライドは、自動染色機内に置かれる。この染色機では、一連の浸潤ステップを経て、このスライドの異なる組織および細胞が異なる色に染色される。こうすると、病理学者が異なる構造を識別する助けになり、組織中の異常を発見することがより容易になる。この染色手順が完了した後で、これらのスライドにカバーガラスを載せ、それらを病理学者が顕微鏡下に置いて分析する準備を整える。
【0007】
上記で示した手順の概要に基づいて、従来方式の組織標本のハンドリングおよび処理が、組織学技師が実施するいくつかの手作業のステップを伴う極めて労働集約的な工程であることが理解されよう。このため、手根管症候群など、繰り返し圧迫を受けることによる障害が蔓延している。これは、組織標本を包埋する工程に特に当てはまる。これら複数の手作業の操作および過剰なハンドリングにより、人的ミスの確度が大きくなり、さらに、病理学者による分析を行うために最終的にスライドに付着させる組織標本を、正確な診断が行われるように最適な状態かつ向きになるようにするために、高度な訓練を受けた熟練組織学技師が必要になる。上記で述べたように、組織生検スライドを準備する従来方法はバッチモード工程であり、組織学技師は、この組織学技師が操作し得るスピードに基づいてあらかじめ選択した数のカセットとともに工程ステップ間を移動することになる。
【0008】
生検分析用の組織標本を準備する工程中で、生産性を高め、かつ人的ミスの発生を減少させるために、1つのシステムおよび方法が開発されている。この点で、特許文献1は、組織を閉じ込め支持するデバイスに関するものである。この開示をここに参照により本明細書に組み込む。このデバイスは、カセットとすることができ、これをミクロトームで切断し得る。カセットを使用する場合、このカセット内で組織標本を固定し、組織液をワックスで置き換える処理にかける。次いで、この組織標本およびカセットを同時にスライスして、顕微鏡スライド上に載せる。この組織標本は、それを組織処理機で処理するときから、ミクロトームで切断するときまで、カセットから取り出さないので、別々の組織ハンドリングステップが不要になるために、かなりの長さの時間が節約され、人的ミスの可能性がかなり小さくなる。この特許は、この手順全体中のハンドリングステップをさらに少なくする自動化工程の概略も論じている。
【特許文献1】米国特許第5,817,032号明細書
【発明の開示】
【発明が解決しようとする課題】
【0009】
この分野では様々な改良がなされているが、さらにハンドリングを少なくし、製作スループットを向上させ、包埋組織標本の品質のばらつきをなくすことがますます求められている。
【課題を解決するための手段】
【0010】
本発明は一般に、ミクロトームにより切片化可能なそれぞれの支持体内で組織標本を準備する自動機械に関するものである。この機械は、組織包埋操作の前に、ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材を含む。出力部材は、組織包埋操作の後で、ミクロトームにより切片化可能な複数の支持体を保持するように構成される。好ましくは、冷却ユニットは、組織包埋操作中にこれらミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成される。より好ましくは、より高速な製作を行うために複数のTEC(熱電式冷却器)ユニットを使用するが、本発明の原理から逸脱することなく他の冷却装置を使用し得る。TECが好ましいのは、それが加熱サイクルと冷却サイクルの間を迅速に循環し得るからである。本発明によれば、まず、TECを循環動作させてミクロトームにより切片化可能な支持体を加熱することが、この支持体を適切に包埋する大きな助けになる。移動用の電動キャリアアセンブリが取り付けられ、ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成される。このキャリアアセンブリは、支持体を、入力部材から冷却ユニットに、最後に出力部材に移動させる。分注装置は、包埋操作中に、ミクロトームにより切片化可能な支持体と、このミクロトームにより切片化可能な支持体によって担持された少なくとも1つの組織標本の上とに包埋材料を分注する。
【0011】
好ましくは、ミクロトームにより切片化可能な支持体は、フレーム内で受け取られ、このフレーム内の第1位置と、ミクロトームで切片化するために包埋組織標本を露出させる第2位置との間で移動可能である。この点で、この機械は、第1位置から第2位置に支持体を移動させるように動作する載置装置も含むことが好ましい。この載置装置および分注器は、それらが複数の冷却ユニット間を一緒に移動するように、同じロボットの一部とし得る。センサは、ミクロトームにより切片化可能な支持体上に分注される包埋材料の量を検出するように動作する。別のセンサは、カセットのサイズおよび/または構成を検出し、それによって、このカセットを、冷却ユニットの1つの上の適切に構成されたベースモールド内に置くことができる。好ましくは、入力部材は、ミクロトームにより切片化可能な複数の支持体を保持かつ分配するように構成された細長いバスケットを備える。このバスケットは、加熱された受け器内に保持することができ、分配用の開口を含み得る。位置決め装置は、ばね圧および/またはおもりなどによって、この分配用開口に向かって、ミクロトームにより切片化可能な支持体を付勢する。
【0012】
好ましい実施形態では、この機械内で、2つの異なる構成の、ミクロトームにより切片化可能な支持体を処理し得るが、この機械が処理することができる構成数は変更し得ることを理解されたい。この目的のために、この機械は、各冷却ユニットと熱的に結合された第1および第2のモールドをさらに含む。第1モールドは、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、第2モールドは、ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成される。この異なる構成は、例えば、異なるサイズ、異なる形状、または他の任意の、ミクロトームにより切片化可能な第1の支持体とミクロトームにより切片化可能な第2の支持体との特徴上の差異とし得る。カセット検出センサは、ミクロトームにより切片化可能な第1および第2の支持体のそれぞれの構成を検出し、その結果、キャリアアセンブリにより、これらのミクロトームにより切片化可能な支持体が、対応する第1または第2のモールドに移される。
【0013】
本発明の上記その他の目的、利点、および特徴は、以下の詳細な説明を添付の図面と併せ読めば、当業者にはより容易に明らかになるであろう。
【発明を実施するための最良の形態】
【0014】
図1および図2を全体的に参照すると、本発明に従って構築された自動機械10は、主扉14を前面に有するハウジング12を含む。図1に示すように主扉14を開くと、入力扉16および4つの別々の出力トレイ18a、18b、18c、18dが現れる。これらの出力トレイは、以下で説明する目的のために着脱可能である。トレイ18cは、その下縁に沿って部分的に外向きに旋回し、機械10の外に持ち上げられる準備が整えられた形で示されている。扉14および16も、それらの下縁から外向きに旋回するが、扉14および16は、それぞれのヒンジ14a、16aによってハウジング12に取り付けられる。ハウジング12の前面は、開口20を含む。開口20により、比較的冷たい室内の空気を、以下で説明する熱電式冷却器内に引き込むことができる。ハウジング12は、機械10を操作するための制御パネル22、ハウジング上面にパラフィン投入開口24、およびハウジング下面にキャスタホイール26を含む。ハウジング12の下側内部27は、以下で説明するように、機械10を動作させるのに必要な様々な制御コンポーネントを含む。図2にさらに示すように、パラフィン投入部24は、液体パラフィンを保持する容器28に通じる。容器28は、液体パラフィンを維持するために、約60℃の適切な温度で加熱される。図2に全体的に示すように、入力扉16は、カセットおよびフレームアセンブリ用分配器30に通じ、出力トレイ18a、18b、18c、18d(図1)は、ハウジング12内に個々のカセットおよびフレームアセンブリ受け32a、32b、32c、32dを含む。それぞれの受け32a〜dは、2列の垂直な、ばねで付勢されたスロットを有し、各スロットは、包埋操作が完了した後で、1つのカセットおよびフレームアセンブリを保持する。機械10には、それぞれ1つまたは複数の組織標本を含むカセットおよびフレームアセンブリが、カセットおよびフレームアセンブリ用分配器30内に装填される。カセットおよびフレームアセンブリ、あるいはよりおおまかに言えば、ミクロトームにより切片化可能な支持体は、任意の適切な形態をとり得る。好ましくは、これらの支持体は、概ね特許文献1に記載されている形態のものであり、以下でさらに説明する。組織標本は、それぞれのカセットおよびフレームアセンブリ受け32a、32b、32c、32d内に個々に置かれる前に、以下で説明するコンポーネントおよび方法を用いてパラフィン中に包埋される。
【0015】
次に、図3を参照すると、ピックアンドプレイスロボット40は、3つの軸に沿って移動可能なピックアンドプレイスヘッド42を含む。具体的には、機械10の前から見ると、基部44は、水平x軸に沿ってレール46、48上を左右に動く。ピックアンドプレイスヘッド42はさらに、水平y軸に沿って、すなわち、機械10の前面に向かって、また前面から離れるようにレール56、58上を動く。垂直支持部50は、ピックアンドプレイスヘッド42を担持し、垂直z軸に沿ってレール52、54上を上下に動く。これらのそれぞれの動きを実現するために、3つの別個のモータおよび駆動ねじアセンブリ60、62、および64が設けられる。モータ60aおよび駆動ねじ60bは、レール46、48に沿って基部44を移動させる。モータ62aおよび駆動ねじ62bは、レール52、54に沿って垂直にピックアンドプレイスヘッド42を移動させる。モータ64aおよび駆動ねじ64bは、レール56、58に沿って両方向にピックアンドプレイスヘッド42を移動させる。ベルト駆動式ねじが示されているが、その代わりに直接駆動または他の任意のタイプの運動装置を使用し得ることを理解されたい。これらのモータおよび制御コンポーネントに必要な様々な電気配線にはすべて、ピックアンドプレイスロボット40の様々な動きを容易にするために、可撓性導管66、68、70が設けられる。
【0016】
依然として図3を参照すると、ピックアンドプレイスロボット40は、分配器30から、それぞれのベースモールドモジュールまたはTECユニット80に、より具体的には、各TECユニット80の上面に配置された2つの選択可能なベースモールド82、84の一方に、カセットおよびフレームアセンブリを移動させる。見やすいように、いくつかのTECユニット80は取り除いてある。複数のTECを一体化し、ユニットすなわちモジュール80にして使用すると、加熱と冷却の機能の間で複数のTECを迅速に循環させることができるので有利である。以下で説明するように、まず、各TECユニット80を使用してベースモールド82またはベースモールド84を加熱し、1つまたは複数の組織標本を含むカセット全体にわたって液体パラフィンをより完全に流入させることができる。こうすると、パラフィンが硬化した後で、その中に空気ポケットが生じない。空気ポケットは、組織学技師または病理学者によって行われる後続のステップの難点になり得る。冷却/加熱ユニットの数およびタイプは変わることがある。例えば、機械10内で処理すべきある範囲の構成および/またはサイズのカセットおよびフレームアセンブリに対応するために、ベースモールド82、84の数も、これより少なくすることもできるし、多くすることもできる。カセットおよびフレームアセンブリのサイズおよび/または構成は、このカセットおよびフレームアセンブリを対応するベースモールド82または84に移す前に、適当なセンサ86によって検出される。例えば、小型の生検カセットは、センサ86によって検出される1つまたは複数の穴を有することがあり、大型のカセットにはこのような穴がないことがある。あるいは、カセットおよびフレームアセンブリ上に、バーコードなど、機械により読取り可能な印を配置し、次いで、これらを、任意の適切な位置に取り付けられた適当な装置によって読み取ることができる。こうすると、この機械内でカセットおよびフレームアセンブリを識別かつ追跡し得る。このように、この機械の制御部は、ベースモールド82または84のいずれにカセットを置くかを識別することができる。
【0017】
(以下でより詳細に説明するやり方で)冷却工程が完了した後で、ピックアンドプレイスロボット40は、TECユニット80から、受け32a、32b、32c、32dの1つの中にあるそれぞれのスロット受け器90に、カセットおよびフレームアセンブリを移動させる。センサ92、94がそれぞれの受け32a〜d上に設けられ、それによって、関連する受け32a〜dがカセットおよびフレームアセンブリを保持しているかどうかが制御システムに示される。ハウジング12の前部で、トレイ18a、18b、18c、18dを、それらのそれぞれのカセットおよびフレームアセンブリ受け32a〜dとともに保持するために、ラッチアセンブリ96が設けられる。好ましくは、これらのラッチアセンブリ96はソレノイド動作式とし、それによって、特定のトレイ18a〜dが取り外されたかどうかを、機械10の制御システムが監視することができる。1つのトレイが取り外された場合、機械10は、動作を停止するか、あるいは少なくとも、取り外されたトレイの位置に包埋されたカセットおよびフレームアセンブリを送ることを停止し得る。
【0018】
図4、図4A、および図4Bに移ると、カセットおよびフレームアセンブリおよびそれらのそれぞれの組織標本を保持するために、複数の、例えば4つの入力バスケット100が設けられ、それによって分配が行われる。内部カバー101の開口101aから、ピックアンドプレイスヘッド42によってアクセスが行われる。各バスケット100は、扉16の内部表面上の加熱された受け器102内に保持される。好ましくは、受け器102はそれぞれ、1つまたは複数のカートリッジ形ヒータ103を含む。ヒータ103により、バスケット100およびその中のカセットおよびフレームアセンブリが、前の組織処理手順で残った残余のパラフィンを、冷却工程の開始まで液化状態に保つように設計された高温に維持される。すなわち、移動する必要がある様々なコンポーネントが目詰まりすることなく移動し得るように、パラフィンの凝固を防ぐ。受け器102間に適切な断熱部105を設けることができる。また、バスケット100および/またはその中のカセットおよびフレームアセンブリでパラフィンが凝固または部分的に凝固すると、受け器102内のバスケット100の目詰まり、または、バスケット100内のカセットおよびフレームアセンブリの目詰まりが生じやすい。バスケット100は、組織学技師などの操作者が、組織処理機から受け器102に直接移すことが好ましいが、その代わりにこの操作を自動化することができる。バスケット100は、穴が開けられており、熱、化学物質、マイクロ波その他の組織処理中に存在する環境条件に耐える適切な材料で構築されている。適切な材料は、General Electric社から入手可能なUltem(登録商標)である。バスケット100は、ヒンジ機構16a、104(図4)により扉16を開き、次いで、バスケット受け器102の上部のばね荷重によるヒンジ式閉鎖部106を開くことによってアクセスし得る。各バスケット受け器102はさらに、ばね荷重式下部保持部材110を含む。保持部材110は、バスケット100からカセットおよびフレームアセンブリが引き出されるときに外向きに開き、次いで、図に示す垂直位置に付勢され、それによって、ピックアンドプレイスヘッド42が次の連続したカセットおよびフレームアセンブリを定位置で掴めるように保持する。バスケット存在感知アセンブリ112は、扉16の内部表面に取り付けられ、バスケット100が受け器102内に下向きに完全に挿入されるときに作動し、それによって、バスケット100が存在することが制御システムに示される。このようなセンサは多くの形態をとり得るが、この場合には、バスケット100のスロット116が作動部材114(図4A)を受けてそれを下向きに移動させ、それによって、付属する要素118が垂直に移動して存在センサ119に入り感知される。
【0019】
図4にさらに示すように、位置決めアセンブリ120を使用して、各バスケット100内のカセットおよびフレームアセンブリがすべて、自動的かつ連続的にそれらの最も下の位置に移動して、個々に分配される準備が整えられるようにする。アセンブリ120は、上部プレート124および下部プレート126を含み、これらのプレートは、それぞれのロッド128a、128bによって互いに結合される。ロッド128a、128bは、それぞれのフィンガ130を担持し、旋回運動を防ぎながら垂直に移動させる。2本のロッド128a、128bに各フィンガ130を結合して示しているが、フィンガ130の旋回運動を防ぐか、あるいは他のやり方でその正しい向きを確保する他の方法を代わりに利用し得ることを理解されたい。フィンガ130は、あらかじめ荷重をかけたばね132によって下方向に付勢される。あるいは、またはそれに加えて、フィンガ130は、おもり、例えば(図示しない)1〜2ポンドのおもりを担持することができ、それによって、バスケット100内のカセットおよびフレームアセンブリ150に下向きの一定の力が加えられる。こうすると、連続したカセットおよびフレームアセンブリがそれぞれ定位置に確実に移動して、以下で説明するように、掴まれ引き出される。移動可能なプレート134は、モータ136と、ナット140にねじ込まれたねじ138とによって動作する。プレート134は、図4に示す位置から上向きに移動して、フィンガ130をそれぞれ最も上の基準位置に移動させ、それによって、受け器102からバスケット100の1つまたは複数を取り出すことができる。プレート134に剛体結合されたナット140は、フランジ部材142を担持する。フランジ部材142は、各方向においてモータ136を停止する時点を制御システムに示すために、それぞれの移動終端位置で存在センサ144、146を作動させる。
【0020】
図4Bに示すように、保持器クリップ148を使用して、バスケット100内で((図示しない)組織標本を収容する)カセットおよびフレームアセンブリ150のスタックを保持する。この説明では、カセットおよびフレームアセンブリ150を1つだけ示す。アセンブリ150は、好ましくは上記で組み込んだ特許文献1、または国際特許出願PCT/US02/30775号(この開示を参照により本明細書に全体的に組み込む)に記載されている開示に従って構築された内部カセット150aと、やはり好ましくは、上記で参照した特許または特許出願に従って構築された外部フレーム150bとを含む。バスケット100には一般に、例えば、30〜40個のカセットおよびフレームアセンブリ150を充填することになり、アセンブリ150のスタックの上部で保持器クリップ148を使用して、ハンドリング中にバスケット100内でアセンブリ150が動かないようにする。バスケット100は、1対のスロット152、154を含む。これらのスロットを通して、ピックアンドプレイスヘッド42が、最も下のカセットおよびフレームアセンブリ150を掴む。バスケット100はさらに、その内部にアクセスできるように着脱可能なカバー156を含む。カバー156はスロット156aを含む。スロット156aを通して、前に説明したフィンガ130(図4)のうち1つフィンガの延長部130aを挿入して、カセットおよびフレームアセンブリ150のスタックの上部を押し、それによって、カセットおよびフレームアセンブリ150が常に、スロット152、154に隣接する位置にくるようにして、掴む動作が行われる。カバー156の下端は、陥凹部158、160も含む。これらの陥凹部により、ピックアンドプレイスヘッド42のグリッパフィンガがアクセスを行うことができる。これを以下で説明する。
【0021】
次に図5〜図7を参照すると、ハウジング12内で移動する載置ロボット170も取り付けられている。載置ロボット170は、3つの軸(u、v、w、図6参照)に沿って移動可能な載置装置/充填装置172を含む。載置用ロボット170は、モータ174および駆動ねじ176によって、左右(w軸)にレール178、180に沿って移動可能である。載置装置/充填装置172はさらに、モータ184および駆動ねじ186によって、上下(v軸)にレール182に沿って移動可能である(図7)。載置用ロボット170は、モータ192および駆動ねじ194によって、レール188、190に沿って前後(u軸)両方向に移動可能である。可撓性導管191、193は、載置用ロボット170の動作中に必要な電気配線およびパラフィンチューブを含む。ピックアンドプレイスロボット40が、ベースモールド82または84の一方にカセットおよびフレームアセンブリ150を配置した後で、載置用ロボット170は、レール178、180および188、190に沿って、カセットおよびフレームアセンブリ150を保持するベースモールド82または84のすぐ上の適正な位置に移動する。次いで、モータ184および駆動ねじ186を使用して、載置装置/充填装置172を垂直方向に位置決めする。以下、これを説明する。
【0022】
図7から図10Aおよび図10Bを参照すると、載置装置/充填装置172は、より具体的には、レール188、190に沿って移動する4つのリニアブシュすなわちベアリングブロック188a、190aに剛体的に固定された支持アセンブリ195を含む。支持アセンブリ195は、ナット197を介してねじ194に沿って運ばれる取付け部材196にも剛体的に固定される。そのため、モータ192がナット197を貫通してねじ194を回転させると、支持アセンブリ195がレール188、190に沿って移動する。概ねU形をした支持部材198は、アセンブリ195の剛体的な一部をなしている。前に論じたように、別のモータ184により、載置装置/充填装置172を垂直に移動させるための推進力が得られる。モータ184は、支持アセンブリ195の取付け部分195aに剛体結合される取付け部分184aおよび回転可能部分184bを含む。ベアリング199は、取付け穴198b内に保持され、回転中にねじ186を支持する。モータ184の回転可能部分184bはねじ186に剛体結合し、それによって、ねじ186がU形支持部材198内で回転し得る。載置装置/充填装置172はさらに、ねじ186と係合するナット204を担持する垂直支持部材202を含む。それによって、垂直支持部材202は、垂直支持部材202に剛体的に固定されたリニアブシュ182aを介してレール182に沿って移動する。レール182は、支持アセンブリ195の一部195bに剛体的に固定される。垂直支持部材202は、ベースモールド82内でフレーム150bを貫通して、図9および図10に示す位置までカセット150aを押す4つのフィンガすなわちプッシャ203を担持する。プッシャ203を高温(例えば、60°〜65℃)で維持するために、プッシャ203にはヒータ205も結合される。活動化モータ184およびねじ186によってプッシャ203が垂直に移動して、ナット204によって担持された垂直支持部材202がレール182に沿って下向きに移動し、その結果、プッシャ203が下向きに移動してカセット150aの上部コーナ部分に当たる。同時に、垂直支持部材202は、4つのばね荷重式保持部材206(そのうち2つだけを図示する)を下向きに移動させてフレーム150bの上部コーナ部分に当て、それによって、載置/パラフィン充填工程中にフレーム150bが固定される(図10A)。この載置工程が完了した後で、カセット150aの底部が、ベースモールド84の内部でフレーム150bの外に露出される。
【0023】
この時点で、図10Bに示すように、フィンガすなわちプッシャ203を、それらはパラフィン205に接触しないが、ばね荷重式保持部材206は依然としていくらかのばね圧でフレーム150bをベースモールド84に当てて保持している位置に、モータ184によって上向きに引き抜く。次いで、液体パラフィン205をベースモールド84内に、カセット150a全体にわたって分注して組織標本210を包埋する。この目的のために、分注チューブ212は、適切なバルブ214、および容器28(図2および図3)に連結されたチューブ216(図9)からパラフィンを受け取る。パラフィンと緊密に熱接触することになるすべてのコンポーネントの場合と同様に、好ましくは、これらのコンポーネントを約60°〜65℃の高温に維持する。好ましくは、分注チューブ212は、RTDおよび温度ヒューズアセンブリ224により制御されるカートリッジヒータ220によって加熱する。必要な場合には、チューブ216も同様に加熱し得る。好ましくは、パラフィンは、重力によって分注するが、必要な場合には、ポンプを使用することができる。リミットスイッチ230、232(図9)は、垂直支持部材202の位置を、上下の制限のところで監視する。充填手順中にプッシャ203をパラフィンレベル(高さ)の上に上げるために利用する中間位置は、単にねじ186を所定の量だけ回転させることによって制御し得る。液体パラフィンのレベルが適正になる時点、すなわち、好ましくはフレーム部材150bの上面近くになる時点を感知するために、超音波レベルセンサ234(米国ニューヨーク州ロングアイランドHauppauge所在のCosense社から入手される型番ML102)を載置装置/充填装置172に取り付ける。この時点で、バルブ214を閉じて、分注チューブ212からのパラフィンの分注を停止する。各カセット150a内の組織の量に応じて、様々な量のパラフィンを各ベースモールドに加えることが必要とされることになるので、レベルを感知することが好ましい。そのため、レベルを感知することにより、ベースモールド82または84内で、パラフィンがあふれたり、パラフィンの充填が少ないことがないようにする。
【0024】
充填動作が完了した後で、TECユニット80を活動状態にして、ベースモールド84内で液体パラフィンを冷却し凝固させて硬化したブロックにする。これには、例えば1分〜3分かかることがある。TECは、ペルチェタイプの素子を使用するために加熱動作と冷却動作を反転し得るので、まず、TECユニット80を使用して、液体パラフィンがカセット150aの穴を通ってより良好に流れることができるようにベースモールド84を加熱する。加熱された状態ではパラフィンの粘度が低くなる結果、流れがより良好になる。こうすると、空気が閉じ込められることを防ぐ助けになり、好ましい固体ブロック状硬化パラフィンが最終的に確実に形成される。図8に最もよく示されているように、各TECユニット80は、2つのTECで構築される。これらのTECは、従来型のセラミック/金属プレートアセンブリを備え、ペルチェ素子として動作し、それによって、ベースモールド82、84の底面との伝導により表面が冷却(または加熱)される。各TECユニット80は、TEC236の下に、入口ファン240および出口ファン242を備えた空気流路238を含み、それによって、機械のハウジング12の前面の開口20(図1)を通して中に空気を取り込み、ハウジング12の下側部分に通じる適当な排気導管244を介してこの空気を排出する。こうすると、冷却サイクル中に、熱をユニット80から取り去るように適切に伝達させることができる。
【0025】
図11Aおよび図11Bに、カセットおよびフレームアセンブリ150を掴むのに使用する、ピックアンドプレイスヘッド42上の特定のグリップ機構250を示す。具体的には、1対の対向するグリッパフィンガ252、254は、それぞれの突起252a、252bおよび254a、254bを含む。これらの突起は、各フレーム150bのへこみ256に合う(図14)。ソレノイド260によって駆動されるオーバセンタタイプの機構を利用して、図11Aに示す開位置すなわち解放位置と、図11Bに示す閉位置すなわちグリップ位置の間でフィンガ252、254を動かす。リンク機構262、264は、図11Aに示す位置と、図11Bに示す旋回したオーバセンタ位置との間で移動する。作動部材266は、ソレノイド260の往復動作出力部268に連結され、各リンク機構262、264のそれぞれの旋回点270、272に旋回可能に連結される。各リンク機構262、264はさらに、点274、276のところでグリッパフィンガ252、254に旋回可能に連結され、そのため、作動部材266の往復運動により、リンク機構262、264が旋回し、同時に、ソレノイド出力部268がソレノイド260に対して相対的に外向きまたは内向きのいずれに動くかに応じて、グリップフィンガ252、254が内向きまたは外向きに動く。このタイプの装置の代替手段として他の多くのタイプのグリップ装置を使用し得ることを理解されたい。好ましい実施形態では、グリップ機構250上に赤外線存在センサ280も担持され、それによって、バスケット100内にカセットおよびフレームアセンブリ150が存在するかどうかが示される。存在センサ280によりカセットおよびフレームアセンブリ150が検出されない場合、制御システムは、ピックアンドプレイスロボット40に、ピックアンドプレイスヘッド42をグリップ機構250とともに次のバスケット100に移動させるように指示し得る。
【0026】
次に、前に説明した図ならびに図12〜図16に関して、機械10の動作を説明する。図4に示すように、受け器102に、それぞれいくつかのカセットおよびフレームアセンブリ150を収容する入力バスケット100が装填される。好ましくは、これらの入力バスケット100は、各カセット150a内に収容された組織標本210(図10)中の液を、周知のやり方でパラフィンその他の適切な材料で置き換えるように処理した(図示しない)組織処理機から直接持ってこられる。受け器102内にバスケット100を装填するには、入力扉16を開くことができるように、カセット位置決め装置120をその最も上の位置に上げなければならない。次いで、入力扉16を閉じた後で、位置決め装置120がプレート134を下げ、それによってフィンガ130、130aが、ばね132および/または(図示しない)おもりによって生成された力を受けて下がり得る。図12に示すように、ピックアンドプレイスヘッド42と、より具体的には、グリッパフィンガ252、254が、開口101a、およびバスケット100の1つの分配用スロット152、154(図4、図4B)に入るように、ピックアンドプレイスロボット40を移動させる。グリッパフィンガ252、254は、最も下のカセットおよびフレームアセンブリ150を掴む。次いで、ピックアンドプレイスロボット40は、掴んだカセットおよびフレームアセンブリ150をセンサ86(図3)に搬送する。カセットセンサ86からの示度に基づいて、このカセットおよびフレームアセンブリ150を、空であり、かつ検出されたカセットおよびフレームアセンブリ150の構成(例えば、サイズおよび/または形状)に対応するベースモールド82または84の一方に搬送する。ピックアンドプレイスヘッド42は、選択されたベースモールド82または84内にカセットおよびフレームアセンブリ150を落とし、初期起動中には、ピックアンドプレイスロボット40は次いで、入力バスケット100に戻り、この工程を繰り返す。正常な動作中、ピックアンドプレイスロボット40は、冷却/硬化したアセンブリ150を出力スロット90(図15)の1つに移動させ、次いで、入力バスケット100に戻る。
【0027】
その後、図6に示すように、対応するベースモールド82内に装填されたばかりのカセットおよびフレームアセンブリ150の上の定位置に、載置ロボット170が移動する。図8〜図10に関して上記で示し説明したように、カセット150aはベースモールド82内に載置し(すなわち移動し)、ベースモールド82には、分注チューブ212から液体パラフィンが充填される。センサ234によって分注動作が完了したことが検出されると、載置ロボット170は、TECユニット80の別のベースモールド82または84の上の次の位置、すなわち、ピックアンドプレイスロボット40が別のカセットおよびフレームアセンブリ150を装填したところに移動する。次いで、この連続した次のカセットおよびフレームアセンブリ150に対して、載置/充填動作を繰り返す。図14に示すように、ピックアンドプレイスヘッド42は、TECユニット80上で冷却すなわち硬化工程を完了した包埋済みカセットおよびフレームアセンブリ150の位置に移動し、グリッパフィンガ252、254を使用してこのカセットおよびフレームアセンブリ150を掴む。次いで、図15に示すように、ピックアンドプレイスロボット40は、この時点で組織標本210を収容した硬化パラフィンブロック290を含むカセットおよびフレームアセンブリ150を掴んだピックアンドプレイスヘッド42を、スロット90を有する出力トレイ18aの1つに移動させる。包埋されたカセットおよびフレームアセンブリ150は、この包埋されたカセットおよびフレームアセンブリ150と摩擦により係合するばね荷重式クリップ部材300によってスロット90内に保持される。この時点で、グリッパフィンガ252、254は、カセットおよびフレームアセンブリ150を解放する。図16に示すように、ソレノイド96を作動させ、トレイ18aを外向きに旋回させ、機械11からトレイ18aを持ち上げることによって、出力トレイ18aを取り出すことができる。
【0028】
機械10の動作は、図17に示すシステム制御部350によって制御される。システム制御部350は、例えばタッチスクリーンモニタなどのユーザI/O 354に接続された制御部352を含む。制御部352は、任意選択で、イーサネット(登録商標)356にも接続され、それによって、制御部352と(図示しない)別のコンピュータの間で通信が行われる。制御部352は、様々なセンサから機械10に関する入力を受け取る。例えば、超音波受信機358は、パラフィン充填センサ234および貯留器レベルセンサ359から入力を受け取る。他の制御入力は、デジタルI/Oインターフェース360に接続される。デジタルI/Oインターフェース360は、例えば、フレーム/カセットセンサ86、受けセンサ92、94、フレーム存在センサ280、およびバスケット存在センサ112など、様々なセンサに接続される。
【0029】
制御部352は、ステップモータコントローラ362にコマンド信号を提供し、ステップモータコントローラ362は、同等のコマンド信号を、ステップモータ60a、62a、64a、および192、174、184、ならびに136に周知のやり方で提供する。コントローラ362は、リミットスイッチ、例えば、v軸に沿った移動制限を検出するリミットスイッチ230、232からフィードバック信号を受け取る。さらに、エンコーダ364は、それぞれのステップモータに接続され、それぞれのステップモータコントローラ362にそれぞれのフィードバック信号を提供し、それによって、各ステップモータの指令された動きを確認することができる。ステップモータコントローラ362が、それぞれのステップモータの指令された動きを検出し損なった場合、このコントローラは、エラー信号を制御部352に戻し、それがモニタ354上に表示される。
【0030】
制御部352はさらに、8対の各ベースモールド82、84に関連する16個のTECプレート236それぞれの動作を制御する熱電式3状態コントローラ366に接続される。各TECプレート236は、対応するRTD368を有する。RTD368は、そのそれぞれのTECプレート236の温度を表す温度フィードバック信号をコントローラ366に提供する。図18を参照すると、熱電式3状態コントローラ366は、クロック372によって駆動されるマイクロコントローラ370を有する。この機械は、16個しかTECプレート236を備えないが、コントローラ366は、24個のTECプレート236に対応するように構築されていることに留意されたい。マイクロコントローラ370は、システムインターフェース374と、TECループ状態機械376と、較正アルゴリズム378と、A/Dコンバータおよび信号処理装置380とを提供するソフトウエアモジュールを含む。コントローラ370は、16個すべてのTECプレート236を制御し、TECプレート236の数がこれより多くても少なくてもそれらを制御するように構成し得る。このような多数の装置、すなわち、24個のTECプレート236および24個のRTD368に対応するために、マイクロコントローラ370と、TECプレート236およびRTD368との間のインターフェース装置として「CPLD」(複雑なプログラム可能な論理回路)388を使用する。ループクロック382は、CPLD388のループクロック状態機械393によって調整可能な連続した時間窓を提供する。各時間窓中、マイクロコントローラ370からのコマンドに応答して、CPLD388内のA/Dコンバータ状態機械389により、すべてのRTDからの出力が多重化されてA/Dコンバータ384に入る。各時間窓中、RTD出力は、マイクロコントローラ370の一部として制御部352からのコマンドに応答して各TECプレート236の動作を調整するマイクロコントローラ370によって読み取られる(図17)。いずれかのTECプレート236の動作状態が変化した場合、TECインターフェース392内のMOSFET電流スイッチ395の状態が変化するはずであり、この新しい状態は、CPLD388のMOSFET制御状態機械391に転送される。次いで、この新しい状態は、それぞれの駆動部390を介してそれぞれの電流スイッチ395に供給される。このように、それぞれのRTD368から提供される温度の測定値は、制御部352によって指令される温度に密接に一致して維持される(図17)。
【0031】
再度図17を参照すると、制御部352により、グリッパソレノイド260、パラフィンバルブ214、および4つのトレイラッチソレノイド97のそれぞれに動作可能に接続されたソレノイド駆動部394にコマンド信号が提供される。図19を参照すると、このソレノイド駆動部は、システムインターフェース400、グリッパ制御部402、パルス幅変調器404、406、およびI/O制御部408を提供するソフトウエアモジュールを含むマイクロコントローラ398用のクロック397を有する。I/O制御部408は、I/Oインターフェース410に出力信号を提供して、ソレノイド状態LED412を駆動する。機械10内の熱を最小限に抑えるために、ソレノイド駆動部394は、機械10の様々なソレノイドを動作させるのに必要な最小電流を提供するように設計される。例えば、グリッパ制御部402は、まず、駆動部414に作動電流を提供し、次いで駆動部414は、増幅器415を介してグリッパソレノイド260に出力電流を提供することによってソレノイド260を動作させる。この作動電流は、迅速に、ソレノイド260およびグリッパ250を作動させ、それらの状態を変更するのに有効である。その後、グリッパ制御部402は、駆動部416に保持電流を提供し、次いで駆動部416は、ソレノイド260をその現在の状態で保持するのに必要な最小電流を提供する。
【0032】
4つのトレイラッチの1つを開くように要求する信号は、入力装置417、例えば、機械上の押しボタンまたはユーザI/O 354(図17)のタッチスクリーン上のボタンによって提供することができる。この要求に応答してマイクロコントローラ398は、「PWM」(パルス幅変調器)404を動作させて、PWM選択スイッチ418に出力信号を提供し、次いで、PWM選択スイッチ418は、増幅器422を介してMOSFET電流スイッチ423の適切な1つに作動電流および保持電流を提供する。このMOSFET電流スイッチ423は、4つのトレイラッチソレノイド97の1つを動作させてラッチすなわちインターロックを解除し、それによって、トレイを外向きに旋回させ、取り出すことができる。同様に、制御部352からのコマンドに応答してマイクロコントローラ398は、PWM406を動作させて、双方向PWM選択スイッチ420、増幅器424、およびMOSFET電流スイッチ425を介してバルブソレノイド215に作動電流および保持電流の信号を提供する。
【0033】
再度図17を参照すると、ヒータコントローラ426は、制御部352からのコマンドに応答して、貯留器28、バルブ214、ノズル212、供給チューブ216、および入力扉16上の8個の受け器102に関連するヒータ220を制御する。ヒータコントローラ426は、ヒータ220をオンオフ制御するように動作して、制御部352によって指令された温度を維持する。これらのヒータは、抵抗性のACヒータおよびDCヒータであり、RTD124は、ヒータ220のそれぞれに近接して配置され、それによって、加熱中のそれぞれの装置の温度を表す温度フィードバック信号が提供される。ヒータ制御コントローラがこのような多数のヒータおよびRTDを制御するために、図18のTECコントローラに関して説明したものと類似のやり方でループ状態機械およびCPLDを使用し得る。ゼロ交差式のTRIAC電流スイッチを周知のやり方で使用して、DCヒータおよびACヒータの動作をそれぞれ制御することができる。
【0034】
使用に際して、受け器102にバスケット100を装填するために、操作者は、タッチスクリーンモニタ354を使用して、カセット位置決め装置120に、その最も高い位置に上がるように指令し、それによって入力扉16を開くことができる。機械10内にバスケット100を配置した後で、入力扉16を閉じる。操作者は再度、タッチスクリーンモニタを使用して位置決め装置120に、プレート134を下げるように指令し、それによって、フィンガ130、130aが、ばね132および/または(図示しない)おもりによって生成された力を受けて下げられる。カセット位置決め装置120を移動させ、入力扉16を開閉する工程は、完全に自動化し得ることが理解されよう。その上で、操作者が、機械10に出力トレイ18を装填する。
【0035】
フレームおよびカセットアセンブリ150の処理は、3つの動作モードで行われる。第1のモールド装填モードでは、バスケット100から、8対の各モールドのモールド82、84(図3)の一方にフレームおよびカセットアセンブリを連続して移し、充填/冷却サイクルを開始する。8個のモールド82または84の装填、充填、および冷却の後で、制御部352は、モールド82または84から出力トレイ18に、冷却されたフレームおよびモールドアセンブリ150を連続して移動させる連続処理モードを開始する。空になったモールドには直ちに、バスケット100から別のフレームおよびカセットアセンブリ150を装填し直し、この連続モードを、バスケット100からアセンブリ150のすべてが取り出されるまで継続する。その後、制御部352は、残っている冷却済みフレームおよびカセットアセンブリを、モールド82、84からトレイ18に移動させるモールド取出しモードを開始する。
【0036】
処理を開始するために、この場合も操作者は、タッチスクリーンモニタ354を使用してサイクルの開始を指令する。このコマンドに応答して、制御部352は、図20に示すように、モールド装填サイクルを実行する。制御部352は、まずステップ450で、リミットスイッチ364の状態を監視することによって、搬送ロボット40および載置ロボット170が、それらの基準位置にあるかどうかを判定する。搬送ロボット40の基準位置は、充填すべき第1モールドに最も近いx軸移動制限、z軸の上限、および機械10に対して相対的に前方のy軸の制限のところで定義する。載置ロボット170の基準位置は、充填すべき最後のモールドに最も近いx軸移動制限、z軸の上限、および機械10に対して相対的に前方のy軸の制限のところで定義する。これらのロボットのいずれかがその基準位置にない場合、制御部352はステップ452で、ステップモータコントローラ362に、ステップモータを動作させ、これらのロボットをそれらの基準位置に移動させるコマンド信号を提供する。ステップ454において一時停止タイマが動作していないことを確認した後で、制御部352はステップ456で、コントローラ362に、バスケット100に隣接する開口101(図4)の外側だが、そのすぐ隣の位置にグリッパ250を移動させるように指令する。その後、制御部352は、ステップ458で、図21により詳細に示す入力バスケット取上げサブルーチンを実行する。
【0037】
このサブルーチンの実行に際して、制御部352はまずステップ602で、ソレノイド駆動部394に、グリッパソレノイド260を作動させ、グリッパフィンガ252を開くように指令する(図11A)。その後、制御部352はステップ604で、適切なコントローラ362に、ステップモータ64aを動作させ、開口101aを通してバスケット100内にグリッパフィンガ252を移動させるように指令する(図12)。次いで、制御部352はステップ606で、グリッパフィンガ252に閉じるように指令し(図11B)、ステップ608で、ステップモータ64aに、その動きを反転し、グリッパフィンガ252を開口101aのすぐ隣のグリッパフィンガ252の元の位置に戻すように指令する。その後、制御部352はステップ610で、グリッパ250上に配置されたフレームセンサ280の状態を読み取る。図20のモールド装填サイクルの動作は、制御部352がステップ460で、フレーム150bがグリッパ250内に存在するかどうかを判定するまで継続する。
【0038】
フレーム150bがグリッパ250内に存在する場合、制御部352はステップ462で、ステップモータに、グリッパ250をカセットセンサ86(図3)に移動させるように指令する。ステップ464で制御部352は、図22により詳細に示すカセット装填テストサブルーチンを実行する。いくつかのテストは、フレームおよびカセットアセンブリ150がグリッパ250内で正しい向きになっていることをステップ620で確認するためにセンサ86を使用して実施する。例えば、アセンブリ150は、不注意で上下逆さまに装填されていたり、不注意で前後が回転していることがあり得る。次に、制御部はステップ622で、カセット150a(図4B)がフレーム150b内に配置されていることを確認する。グリッパ250上のセンサ280は、フレームおよびカセットアセンブリ150のフレーム部分150bの存在を検出することしかできない。したがって、フレーム150bが、確かにカセット150aを支持していることを確認することが重要である。さらに、機械10は、2種類の異なるサイズのカセットを処理し得る。したがって、制御部352はステップ624で、センサ86を使用して、どちらのサイズのカセットが現在グリッパ内にあるかを検出し得るようにグリッパ250を操作する。サイズが検出されると、ステップ626、628で適切なフラグが設定される。これらのテストのいずれかでエラーが検出されると、制御部352はステップ630で、モニタ354上にこのエラーを表示し、このエラーが是正されるまで、制御部352の動作サイクルを停止する。
【0039】
図20のモールド装填サイクルに戻ると、カセット装填テストがうまく完了した後で、制御部352はステップ466で、グリッパ250に、空であり、かつ検出されたカセットサイズに対応するモールド対の1つ、例えば第1のモールド82(図3)の上の垂直逃げ位置に移動するように指令する。さらに、制御部352は、載置ロボット170に、その基準位置から、モールド82のすぐ隣の位置の右側に移動するように指令する。さらに、制御部352は、熱電式コントローラ366に、モールド82に関連するTECプレート236をオンにするように指令する出力信号を提供する。熱電式コントローラ366は、RTD368からの温度フィードバック信号を使用して、モールド82が所望の温度に加熱されるようにTECプレート236を動作させる。
【0040】
搬送ロボット40がグリッパを垂直逃げ位置に移動させた後で、制御部352はステップ468で、図23により詳細に示す、モールド内にフレームを装填するサブルーチンを実行する。まず、制御部352はステップ632で、ステップモータ62aに、フレームおよびカセットアセンブリ150が、モールド82a上、またはそのわずかに上にくるようにグリッパ250を下げるように指令する(図13)。その後、制御部352はステップ634で、グリッパフィンガ252に開くように指令し(図11A)、次いで、ステップ636で制御部352は、ステップモータ62aの動作を反転して、グリッパ250をその垂直逃げ位置に上げる。次いで、制御部352はステップ638で、フレームセンサ280を読み取って、フレーム150bがグリッパ250内にもはや存在しないことを確認する。フレームが検出された場合には、制御部352はステップ640で、適切なエラー信号を表示し、動作を中止する。
【0041】
次に、制御部352は、ステップモータ174に、載置ロボット170をモールドの上に移動させるように指令する。その後、制御部はステップ472で、内部一時停止タイマをスタートさせ、次いでステップ474で、図24により詳細に示すモールド充填サイクルサブルーチンを開始する。このモールド充填サイクルを実行する際に、制御部352はまずステップ650で、ステップモータ184に、載置装置/充填装置172を下げるように指令する(図8)。垂直支持部材202は、4つのバネ荷重式保持部材206を下向きに移動させてフレーム150bの上部コーナに当て、それによって、パラフィン充填工程中にこのフレームを固定する。同時に、プッシャ203(図9)が下向きに移動して、カセット150aの上部コーナ部分に当たり、それによって、カセットおよびフレームアセンブリ150がモールド84内に強く押し付けられる。次いで、制御部352はステップ652で、モータ184に、充填処理中にプッシャ203がパラフィンに接触しない位置に載置装置/充填装置172を上げるように指令する。保持部材206は、依然としてばね圧でモールドに当ててフレーム150bを保持していることに留意されたい。その後、ステップ654で制御部352は、パラフィンバルブ214を開き、かつモールドにパラフィンの充填を開始する(図10)ように指令する出力信号をソレノイド駆動部394に提供する。さらに、制御部352は、内部冷却開始タイマの動作をスタートさせる。モールド充填サイクルが終了する少し前に、モールドの冷却を開始すると、処理の品質がより高くなることが実験からわかっている。ただし、TECを冷却モードに切り替えるべき厳密な時点は、応用例に依存する。したがって、制御部352がステップ656で、冷却開始タイマが終了したことを確認した後で、制御部352はステップ658で、それぞれのTECプレート236の動作を加熱モードから冷却モードに切り替え、さらに、冷却停止用内部タイマの動作をスタートさせる。次いで、制御部352はステップ660で、制御部352が、パラフィン充填センサ234から、モールド84が充填されたことを示す信号を受け取る時点を確認する。この時点で、制御部352はステップ662で、ソレノイド駆動部394に、充填バルブを閉じるように指令する出力信号を提供する。さらに、制御部352は、ステップモータ184に、載置装置/充填装置172をその最も高い位置に上げるように指令する。
【0042】
図20に戻ると、モールド充填サイクルサブルーチン476を開始した後で、制御部352は、現在充填中のモールドが、充填すべき最後のモールドかどうかも判定する。そうでない場合には、制御部はステップ454で、一時停止タイマが終了したかどうかを判定する。この一時停止タイマは、単に搬送ロボット40の動作をある短い期間だけ一時停止させるだけである。一時停止タイマが終了すると、制御部は、ステップモータ60a、62a、64aに、バスケットの開口に隣接する位置にグリッパを移動させるように指令する。8個のモールド位置ごとに、ステップ454〜476に関して説明した処理を繰り返す。制御部352がステップ476で、最後のモールドが充填中であることを検出すると、制御部はステップ478で、モータ60aに、グリッパ250を第1モールドの上の垂直逃げ位置に移動させるように指令し、その後で、図20のモールド装填サイクルを終了する。ステップ460で制御部352が、グリッパ250内にフレーム150bが存在しないと判定した場合、制御部352はステップ480で、現在のバスケットが空かどうかを調べることに留意されたい。制御部352は、現在のバスケットから取り出したフレームおよびカセットアセンブリ150の数を保持している。現在のバスケットから、その最大容量に等しい数のフレームおよびカセットアセンブリが取り出されると、制御部はステップ482で、すべてのバスケットが空かどうか確認する。そうでない場合には、制御部は、グリッパに、入力扉16上の隣接するバスケットの開口に移動するように指令する。
【0043】
すべてのモールドが、まずフレームおよびカセットアセンブリで埋められ、充填サイクルが開始された後で、制御部352は、図25に示すように、連続稼働モードに切り替わる。このモードの第1ステップは、ステップ500で、モールド装填モードが完了したことを確認することである。搬送ロボット40が現在、第1モールドの上で垂直逃げ高さに位置していることを想起されたい。次いで、制御部352はステップ502で、このモールド用の冷却停止タイマが終了したかどうかを判定する。これが確認されると、制御部はステップ504で、図26に示す、モールドからフレームを取り出すサブルーチンを実行する。
【0044】
図14に示すように、モールド84からフレームおよびカセットアセンブリを取り出すために、制御部352は、ステップ670〜676で出力信号を提供して、グリッパフィンガ252に開くように指令し、ステップモータ64aにこのグリッパをモールドに下げるように指令し、グリッパフィンガ252に閉じるように指令し、ステップモータ62aにこのグリッパをその垂直逃げ位置に上げるように指令する。その後、制御部352は、フレームセンサ280の状態を読み取って、フレームが存在するかどうかを判定する。存在しない場合には、制御部はステップ680で、エラーを表示し、このサイクルを終了する。
【0045】
図25に戻ると、その後、制御部はステップ506で、ステップモータ60a、62a、64aに、グリッパをセンサ86(図3)に移動させるコマンド信号を提供する。この位置で、制御部352はステップ508で、図27により詳細に示すカセット取出しテストサブルーチンを開始する。まず、制御部352は、ステップモータ60a、62a、64aに、制御部352がステップ682でセンサ86からの出力信号を監視することによってフレーム150bが存在することを確認し得るように、センサ86に対してグリッパ250を移動させるように指令する。その後、制御部は、グリッパ250に、制御部352がステップ684でこのフレーム内にカセット150aが存在するかどうかを判定し得る位置に移動するように指令する。充填/冷却工程中に、あるいは、取出し工程中に、フレームからカセットが分離することがあり得る。フレームがグリッパ内で正しく保持されていないこともあり得る。例えば、図11Aを参照すると、フレーム150bは、グリッパの前方のピン252a、254aによってのみ保持されることがある。この状況では、このフレームはわずかに回転しており、そのため、後方のピン252b、254bがフレームに正しく固定されない。この状況を検出するために、制御部352は、グリッパ250に、制御部がステップ686でグリッパ内にフレームが正しく固定されていることを確認し得る位置に移動するように指令する。なんらかのエラーが検出される場合、制御部はステップ688で、モニタ354上にエラーを表示し、このサイクルを終了する。
【0046】
カセット取出しテストサブルーチンがうまく実行された場合、図25に戻ると、制御部352は、モータ60a、62a、64aに、この時点で組織標本210を収容する硬化したパラフィンブロック290を含むカセットおよびフレームアセンブリ150とともにグリッパを、図15に示すように、出力トレイ18aの1つのトレイのスロット90の1つに隣接して移動させるように指令する。その後、制御部352は、図28により詳細に示すフレーム解放サブルーチンを開始する。フレームおよびカセットアセンブリ150を解放するために、制御部352はまずステップ690で、ステップモータ62aに、トレイスロット90内にグリッパフィンガ25を移動させるように指令する。包埋されたカセットおよびフレームアセンブリ150は、この包埋されたカセットおよびフレームアセンブリ150と摩擦により係合するバネ荷重式クリップ部材300によってスロット90内に保持される。その後ステップ692で、制御部は、グリッパフィンガ252に開くように指令し、さらにステップ694で、ステップモータ62aに動きを反転するように指令して、トレイスロットからグリッパフィンガを取り出す。次に、制御部352はステップ696で、フレームセンサ280の状態を読み取って、フレームが存在するかどうかを判定する。フレームが検出された場合、制御部352は、モニタ354にエラーを表示する。
【0047】
図25に戻ると、次いで制御部はステップ514で、ステップモータ60a、62a、64aに、グリッパをバスケット開口に移動させるコマンド信号を提供する。搬送ロボット40は続いて、制御部352からのコマンドに応答して、ステップ514〜532に従って、入力バスケットから別のフレームおよびカセットアセンブリを装填する。この装填動作は、図20のステップ456〜470に関して前に説明した装填動作と同じである。第1モールド内に別のフレームおよびカセットアセンブリ150を装填した後で、制御部はステップ534で、図24に関して前に説明したモールド充填サイクルを開始する。このモールド充填サイクルを開始するのと同時に、制御部352はステップ536で、ステップモータ60aに、空にすべき次のモールドの上にグリッパを移動させるコマンド信号を提供する。次いで、制御部はステップ502で、このモールド用の冷却停止タイマが終了したかどうかを判定する。ステップ502〜536の処理は、制御部352がステップ522で、すべての入力バスケットが空になったことを確認するまで継続する。この時点で連続稼働モードが終了し、制御部352は、図29に示す、モールドを空にするサイクルに切り替わる。
【0048】
ステップ540で、連続稼働モードが完了したことを確認した後で、制御部352はステップ542で、ステップモータ174、184、および192に、載置ロボットをその基準位置に移動させるように指令する。その後、制御部352はステップ544で、現在のモールド用の冷却停止タイマが終了したかどうかを判定する。終了している場合、制御部352は、図25に関して前に説明した処理ステップ504〜512と同じ処理ステップ546〜554に従って、このモールドからフレームを取り出す。この処理は、制御部352がステップ556で、すべてのモールドが空であることを検出するまで反復する。この時点で、機械10から出力トレイを取り出すことができる。図16に示すように、出力トレイ18aは、ソレノイド96を作動させ、トレイ18aを外向きに旋回させ、機械10からトレイ18aを持ち上げることによって取り出すことができる。
【0049】
好ましい実施形態を説明することによって本発明を説明し、この実施形態をいくらか詳細に説明してきたが、本出願人の意図は、このような細部に添付の特許請求の範囲の範囲を限定することではなく、また、いかなる形でも制限することではない。当業者には、追加の利点および改変形態が容易に明らかになるであろう。本発明の様々な特徴は、使用者の要求および選好に応じて、単独で用いることもできるし、様々な組合せで用いることもできる。例えば、上記で説明した実施形態では、8対のモールドを使用して、2種類の異なるカセットサイズのカセットに対応する。他の実施形態では、8列のモールドのそれぞれに3つのモールドを有する行列で、24個のモールドを提供することによって、3種類の異なるカセットサイズに対応し得ることを理解されたい。
【0050】
上記で説明した実施形態では、センサ86を使用して、フレームおよびカセットアセンブリを、バスケットから取り上げた後と、モールドから取り出した後でテストする。別の位置に別のセンサを配置して、モールドから取り出した後でフレームおよびカセットアセンブリをテストすることができることを理解されたい。機械10のサイクルタイムを改善するために、このような異なるセンサが望ましいことがある。さらに、異なるタイプのセンサでは、フレームおよびカセットアセンブリを確認する工程を変更し得ることを理解されたい。
【0051】
以上、本発明を、本発明を実施する現時点で好ましい方法とともに説明した。ただし、本発明自体は、添付の特許請求の範囲によってのみ定義されるべきである。
【図面の簡単な説明】
【0052】
【図1】組織標本をハンドリングし包埋するために、本発明の好ましい実施形態に従って構築された自動機械の斜視図である。
【図2】機械の内部を示す斜視背面図である。
【図3】見やすいように、機械のハウジングの外側パネルを取り外し、制御コンポーネントのハウジング部分も取り外した状態の拡大斜視背面図である。
【図4】機械の入力扉部分の分解斜視図である。
【図4A】入力扉の内部表面の分解斜視図であり、カセットおよびフレームアセンブリ分配器を示す。
【図4B】入力バスケットの1つの斜視図であり、1つのカセットおよびフレームアセンブリおよびバスケット内に挿入される保持器クリップを示す。
【図5】機械内部の上面図である。
【図6】機械内の載置用ロボットの拡大斜視図である。
【図7】載置装置/充填装置を備えた載置用ロボットの分解斜視図である。
【図8】概ね図6の線8〜8に沿って切断した断面図である。
【図9】カセットをそれに関連するフレームを貫通してベースモールド内に載置させるところを示す図8に類似の拡大断面である。
【図10A】図9に類似の拡大断面図であり、載置動作も漸進的に示す。
【図10B】図9に類似の拡大断面図であり、載置動作も漸進的に示す。
【図11A】図12の線11A〜11Aに沿って切断した断面図であり、カセットおよびフレームアセンブリを掴む直前のグリッパアセンブリを示す。
【図11B】グリッパフィンガによってカセットおよびフレームアセンブリを掴むところを示す、図11Aに類似の部分的に断面で示す上面図である。
【図12】図5の線12−12に沿って切断した断面図であり、入力バスケットからカセットおよびフレームアセンブリを取り出す工程におけるグリッパアセンブリを示す。
【図13】グリッパアセンブリが、TEC(熱電式冷却)ユニットに付随するベースモールド内にカセットおよびフレームアセンブリを配置するところを示す拡大斜視図である。
【図14】冷却動作が完了した後で、カセットおよびフレームアセンブリが、グリッパアセンブリによって取り出されるところを示す拡大斜視図である。
【図15】機械内で、包埋工程が完了したカセットおよびフレームアセンブリを受け取る出力トレイの断面図である。
【図16】機械から出力トレイを取り出すところを示す、図15に類似の断面図である。
【図17】図1の機械の制御システムの概略ブロック図である。
【図18】図17の制御システムで使用する熱電式3状態コントローラの概略ブロック図である。
【図19】図17の制御システムで使用するソレノイド駆動部の概略ブロック図である。
【図20】図1の機械内でバスケットからモールド内にフレームおよびカセットアセンブリを連続して装填するために、図17の制御システムによって実行される工程を示す流れ図である。
【図21】図1の機械内で入力バスケットからフレームおよびカセットアセンブリを取り上げるために、図17の制御システムによって実行される工程を示す流れ図である。
【図22】図1の機械内で入力バスケットから取り上げられたフレームおよびカセットアセンブリをテストするために、図17の制御システムによって実行される工程を示す流れ図である。
【図23】図1の機械内でモールド内にフレームおよびカセットアセンブリを装填するために、図17の制御システムによって実行される工程を示す流れ図である。
【図24】図1の機械内でモールド内にパラフィンを分注するために、図17の制御システムによって実行される工程を示す流れ図である。
【図25】図1の機械内でフレームおよびカセットアセンブリを連続して装填し、充填し、取り出すために、図17の制御システムによって実行される工程を示す流れ図である。
【図26】図1の機械内でモールドからフレームおよびカセットアセンブリを取り出すために、図17の制御システムによって実行される工程を示す流れ図である。
【図27】図1の機械内でモールドから取り出された充填済みフレームおよびカセットアセンブリをテストするために、図17の制御システムによって実行される工程を示す流れ図である。
【図28】図1の機械内で出力トレイ内に充填済みフレームおよびカセットアセンブリを挿入するために、図17の制御システムによって実行される工程を示す流れ図である。
【図29】図1の機械内でモールドから出力トレイに充填済みフレームおよびカセットアセンブリを連続して移すために、図17の制御システムによって実行される工程を示す流れ図である。
【符号の説明】
【0053】
10 自動機械
12 ハウジング
14 主扉
14a ヒンジ
16 入力扉
16a ヒンジ
18a 出力トレイ
18b 出力トレイ
18c 出力トレイ
18d 出力トレイ
20 開口
22 制御パネル
24 パラフィン投入開口
26 キャスタホイール
27 ハウジング下側内部
28 容器
30 カセットおよびフレームアセンブリ分配器
32a カセットおよびフレームアセンブリ受け
32b カセットおよびフレームアセンブリ受け
32c カセットおよびフレームアセンブリ受け
32d カセットおよびフレームアセンブリ受け
40 ピックアンドプレイスロボット、搬送ロボット
42 ピックアンドプレイスヘッド
44 基部
46 レール
48 レール
50 垂直支持部
52 レール
54 レール
56 レール
58 レール
60 モータおよび駆動ねじアセンブリ
60a モータ
60b 駆動ねじ
62 モータおよび駆動ねじアセンブリ
62a モータ
62b 駆動ねじ
64 モータおよび駆動ねじアセンブリ
64a モータ
64b 駆動ねじ
66 可撓性導管
68 可撓性導管
70 可撓性導管
80 TECユニット
82 ベースモールド
84 ベースモールド
86 フレーム/カセットセンサ
90 スロット受け器
92 受けセンサ
94 受けセンサ
96 ラッチアセンブリ
97 トレイラッチソレノイド
100 入力バスケット
101 内部カバー
101a 開口
102 加熱受け器
103 ヒータ
104 ヒンジ機構
105 断熱部
106 閉鎖部
110 保持部材
112 バスケット存在感知アセンブリ、バスケット存在センサ
114 作動部材
116 スロット
118 付属要素
119 存在センサ
120 位置決めアセンブリ、カセット位置決め装置
124 上部プレート
126 下部プレート
128a ロッド
128b ロッド
130 フィンガ
130a 延長部
132 ばね
134 移動可能なプレート
136 モータ
138 ねじ
140 ナット
142 フランジ部材
144 存在センサ
146 存在センサ
148 保持器クリップ
150 カセットおよびフレームアセンブリ
150a 内部カセット
150b 外部フレーム
152 スロット
154 スロット
156 カバー
156a スロット
158 陥凹部
160 陥凹部
170 載置ロボット
172 載置装置/充填装置
174 モータ
176 駆動ねじ
178 レール
180 レール
182 レール
182a 直線ブッシュ
184 モータ
184a 取付け部分
184b 回転可能部分
186 駆動ねじ
188 レール
188a リニアブシュ、ベアリングブロック
190 レール
190a リニアブシュ、ベアリングブロック
191 可撓性導管
192 モータ
193 可撓性導管
194 駆動ねじ
195 支持アセンブリ
195a 取付け部分
195b 支持アセンブリの一部
196 取付け部材
197 ナット
198 支持部材
198b 取付け穴
199 ベアリング
202 垂直支持部材
203 フィンガ、プッシャ
204 ナット
205 ヒータ、液体パラフィン
206 保持部材
210 組織標本
212 分注チューブ、ノズル
214 バルブ
215 バルブソレノイド
216 チューブ
220 カートリッジヒータ
224 RTD/温度ヒューズアセンブリ
230 リミットスイッチ
232 リミットスイッチ
234 超音波レベルセンサ、パラフィン充填センサ
236 TEC
238 空気流路
240 入口ファン
242 出口ファン
244 排気導管
250 グリップ機構
252 グリッパフィンガ
252a 突起、ピン
252b 突起、ピン
254a 突起、ピン
254a 突起、ピン
256 へこみ
254 グリッパフィンガ
260 ソレノイド
262 リンク機構
264 リンク機構
266 作動部材
268 往復動作出力
270 旋回点
272 旋回点
274 旋回点
276 旋回点
280 赤外線存在センサ、フレーム存在センサ
290 硬化パラフィンブロック
300 クリップ部材
350 システム制御部
352 制御部
354 ユーザI/O、タッチスクリーンモニタ
356 イーサネット(登録商標)
358 超音波受信機
359 貯留器レベルセンサ
360 デジタルI/Oインターフェース
362 ステップモータコントローラ
364 エンコーダ
366 熱電式3状態コントローラ
368 RTD
370 マイクロコントローラ
372 クロック
374 システムインターフェース
376 TECループ状態機械
378 較正アルゴリズム
380 A/Dコンバータと信号処理装置
382 ループクロック
384 A/Dコンバータ
388 CPLD
389 A/Dコンバータ状態機械
390 駆動部
391 MOSFET制御状態機械
392 TECインターフェース
393 ループクロック状態機械
394 ソレノイド駆動部
395 MOSFET電流スイッチ
397 クロック
398 マイクロコントローラ
400 システムインターフェース
402 グリッパ制御部
404 パルス幅変調器
406 パルス幅変調器
408 I/O制御部
410 I/Oインターフェース
412 ソレノイド状態LED
414 駆動部
415 増幅器
416 駆動部
417 入力装置
418 PWM選択スイッチ
420 双方向PWM選択スイッチ
422 増幅器
423 MOSFET電流スイッチ
424 増幅器
425 MOSFET電流スイッチ
426 ヒータコントローラ
【技術分野】
【0001】
本発明は、一般に、生検分析用の組織標本をハンドリングし包埋する機器および方法に関し、より詳細には、このような標本のハンドリングおよび包埋を自動化して行う機器および方法に関する。
【背景技術】
【0002】
様々な組織の疾患および状態を正確に診断するために、医療従事者は、患者の身体から1つまたは複数の組織標本を取り出さなければならない。身体から組織を採取するこの工程は、生検として知られている。1つまたは複数の組織標本が取り出され、病理検査室に送られると、この組織は、組織学技師、および最終的には病理学者によって実施される一連の手順を経て診断されることになる。本発明は一般に、病理学者が顕微鏡下で分析することがある1つまたは複数の組織標本をスライドの形で準備するために、組織学技師によって通常実施される手順に関するものである。
【0003】
本明細書全体を通じて単数形の「標本」という用語を用いるが、この用語は、「複数の標本」という複数形も同様に含むことを理解されたい。患者の身体から組織標本が取り出されると、この組織標本は典型的には、組織固定溶液を収容する試料容器中に置かれ、次いで、この容器は病理検査室に移される。この組織は、病理検査室では「グロスイン」として知られる工程にかけられることになる。この工程中に、組織学技師は、容器から組織標本を回収し、典型的には、この組織を組織処理に適切なサイズに切断し、個々の標本を適切に寸法設定された小型の組織用プラスチックカセット内に置き、各カセットに追跡番号を割り当てる。次いで、これらの追跡番号を検査室で使用する追跡システムに記録する。単に断片であり得る最も小さい組織標本用のカセットは、側面および底面に微細なメッシュ状の開口を有する。極めて小さい組織標本を伴う他の状況では、これらの標本を、ティーバッグに似たバッグ内に置き、これら最小の組織標本がなくなることを防ぐ。比較的大きな組織標本は、いくらか大型のスロット開口を有するカセット内に置く。この場合も、これらの開口は、カセット内の組織標本よりも小さい。
【0004】
次いで、これらのカセットをステンレス綱製の穴あきバスケット内に置き、多くの場合一晩中、組織処理機にかける。この機械は、真空、熱、および化学物質の組合せを使用して間質液を除去する。組織標本からこれらの液を除去した後で、この処理機は、この組織標本を溶融パラフィン浴に浸して、組織内の隙間をパラフィンで置き換える。次いで、組織学技師は、機械からバスケットを取り出し、個々の組織カセットを取り出す。溶融パラフィン溜めおよび分注器を有する包埋ステーションで、組織学技師は、各カセットから組織を個々に取り出す。組織学技師は、組織用カセットとほぼ同じサイズで、溶融パラフィンが部分的に充填されたステンレス綱製のベースモールド内に、組織のタイプに基づき、組織標本の向きに注意して入れなければならない。次いで、この溶融パラフィンを、TEC(熱電式冷却器)とし得る冷却プレート上で急速に冷却させ、パラフィンを部分的に凝固させ、それによって、正しい向きで組織標本を保持する。その後、カセットをベースモールドの上面に置き、カセットの上部開口を通してベースモールド内にパラフィンを注ぐ。この手順のこの時点で、カセットの機能が、組織保持コンポーネントから、凝固したワックスまたはパラフィンから削りくずを取る際に後で使用する固定化デバイスに変わる。このベースモールドを、溶融パラフィンがすべて凝固するまで冷却し、組織学技師は、包埋パラフィンのブロックからステンレス綱製のベースモールドを取り出す。こうすると、組織用プラスチックカセットが反対側にある状態で、組織標本が矩形のパラフィンブロック内に包埋される。組織処理機の場合と同様に、この包埋工程はバッチで実施され、この工程中に、平均的な組織学技師は、1時間当たり約40〜60個のカセットを包埋し得る。
【0005】
このとき、包埋された組織標本を含む硬化したパラフィンブロックは、顕微鏡スライド上に配置するために極めて薄い切片にスライスする準備が整っている。このスライス作業は、ミクロトームとして知られる装置で実現される。組織学技師は、包埋された組織ブロックを塊で、包埋されたプラスチックカセットを有するほうのブロック面を受けるように寸法設定されているミクロトーム上に載せる。次いで、組織学技師は、プラスチックカセット表面の反対側に包埋された組織標本を含むパラフィンブロックのスライス処理を開始することができる。これにより、パラフィン中に包埋された組織のリボン状の個々のスライスが得られる。ミクロトームの動作が正常に行われると、個々のスライスは互いにくっつく。その後、これらの極めて薄いリボン状のスライスを水浴中に浮かべ、このスライスの下に、ガラススライドを注意深く置く。このとき、このスライスは、薄く切片化された組織標本がこのスライス内に包埋された状態で、スライドの上面に付着する。
【0006】
組織学技師により組織標本から十分な数のスライドが得られると、これらのスライドは、自動染色機内に置かれる。この染色機では、一連の浸潤ステップを経て、このスライドの異なる組織および細胞が異なる色に染色される。こうすると、病理学者が異なる構造を識別する助けになり、組織中の異常を発見することがより容易になる。この染色手順が完了した後で、これらのスライドにカバーガラスを載せ、それらを病理学者が顕微鏡下に置いて分析する準備を整える。
【0007】
上記で示した手順の概要に基づいて、従来方式の組織標本のハンドリングおよび処理が、組織学技師が実施するいくつかの手作業のステップを伴う極めて労働集約的な工程であることが理解されよう。このため、手根管症候群など、繰り返し圧迫を受けることによる障害が蔓延している。これは、組織標本を包埋する工程に特に当てはまる。これら複数の手作業の操作および過剰なハンドリングにより、人的ミスの確度が大きくなり、さらに、病理学者による分析を行うために最終的にスライドに付着させる組織標本を、正確な診断が行われるように最適な状態かつ向きになるようにするために、高度な訓練を受けた熟練組織学技師が必要になる。上記で述べたように、組織生検スライドを準備する従来方法はバッチモード工程であり、組織学技師は、この組織学技師が操作し得るスピードに基づいてあらかじめ選択した数のカセットとともに工程ステップ間を移動することになる。
【0008】
生検分析用の組織標本を準備する工程中で、生産性を高め、かつ人的ミスの発生を減少させるために、1つのシステムおよび方法が開発されている。この点で、特許文献1は、組織を閉じ込め支持するデバイスに関するものである。この開示をここに参照により本明細書に組み込む。このデバイスは、カセットとすることができ、これをミクロトームで切断し得る。カセットを使用する場合、このカセット内で組織標本を固定し、組織液をワックスで置き換える処理にかける。次いで、この組織標本およびカセットを同時にスライスして、顕微鏡スライド上に載せる。この組織標本は、それを組織処理機で処理するときから、ミクロトームで切断するときまで、カセットから取り出さないので、別々の組織ハンドリングステップが不要になるために、かなりの長さの時間が節約され、人的ミスの可能性がかなり小さくなる。この特許は、この手順全体中のハンドリングステップをさらに少なくする自動化工程の概略も論じている。
【特許文献1】米国特許第5,817,032号明細書
【発明の開示】
【発明が解決しようとする課題】
【0009】
この分野では様々な改良がなされているが、さらにハンドリングを少なくし、製作スループットを向上させ、包埋組織標本の品質のばらつきをなくすことがますます求められている。
【課題を解決するための手段】
【0010】
本発明は一般に、ミクロトームにより切片化可能なそれぞれの支持体内で組織標本を準備する自動機械に関するものである。この機械は、組織包埋操作の前に、ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材を含む。出力部材は、組織包埋操作の後で、ミクロトームにより切片化可能な複数の支持体を保持するように構成される。好ましくは、冷却ユニットは、組織包埋操作中にこれらミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成される。より好ましくは、より高速な製作を行うために複数のTEC(熱電式冷却器)ユニットを使用するが、本発明の原理から逸脱することなく他の冷却装置を使用し得る。TECが好ましいのは、それが加熱サイクルと冷却サイクルの間を迅速に循環し得るからである。本発明によれば、まず、TECを循環動作させてミクロトームにより切片化可能な支持体を加熱することが、この支持体を適切に包埋する大きな助けになる。移動用の電動キャリアアセンブリが取り付けられ、ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成される。このキャリアアセンブリは、支持体を、入力部材から冷却ユニットに、最後に出力部材に移動させる。分注装置は、包埋操作中に、ミクロトームにより切片化可能な支持体と、このミクロトームにより切片化可能な支持体によって担持された少なくとも1つの組織標本の上とに包埋材料を分注する。
【0011】
好ましくは、ミクロトームにより切片化可能な支持体は、フレーム内で受け取られ、このフレーム内の第1位置と、ミクロトームで切片化するために包埋組織標本を露出させる第2位置との間で移動可能である。この点で、この機械は、第1位置から第2位置に支持体を移動させるように動作する載置装置も含むことが好ましい。この載置装置および分注器は、それらが複数の冷却ユニット間を一緒に移動するように、同じロボットの一部とし得る。センサは、ミクロトームにより切片化可能な支持体上に分注される包埋材料の量を検出するように動作する。別のセンサは、カセットのサイズおよび/または構成を検出し、それによって、このカセットを、冷却ユニットの1つの上の適切に構成されたベースモールド内に置くことができる。好ましくは、入力部材は、ミクロトームにより切片化可能な複数の支持体を保持かつ分配するように構成された細長いバスケットを備える。このバスケットは、加熱された受け器内に保持することができ、分配用の開口を含み得る。位置決め装置は、ばね圧および/またはおもりなどによって、この分配用開口に向かって、ミクロトームにより切片化可能な支持体を付勢する。
【0012】
好ましい実施形態では、この機械内で、2つの異なる構成の、ミクロトームにより切片化可能な支持体を処理し得るが、この機械が処理することができる構成数は変更し得ることを理解されたい。この目的のために、この機械は、各冷却ユニットと熱的に結合された第1および第2のモールドをさらに含む。第1モールドは、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、第2モールドは、ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成される。この異なる構成は、例えば、異なるサイズ、異なる形状、または他の任意の、ミクロトームにより切片化可能な第1の支持体とミクロトームにより切片化可能な第2の支持体との特徴上の差異とし得る。カセット検出センサは、ミクロトームにより切片化可能な第1および第2の支持体のそれぞれの構成を検出し、その結果、キャリアアセンブリにより、これらのミクロトームにより切片化可能な支持体が、対応する第1または第2のモールドに移される。
【0013】
本発明の上記その他の目的、利点、および特徴は、以下の詳細な説明を添付の図面と併せ読めば、当業者にはより容易に明らかになるであろう。
【発明を実施するための最良の形態】
【0014】
図1および図2を全体的に参照すると、本発明に従って構築された自動機械10は、主扉14を前面に有するハウジング12を含む。図1に示すように主扉14を開くと、入力扉16および4つの別々の出力トレイ18a、18b、18c、18dが現れる。これらの出力トレイは、以下で説明する目的のために着脱可能である。トレイ18cは、その下縁に沿って部分的に外向きに旋回し、機械10の外に持ち上げられる準備が整えられた形で示されている。扉14および16も、それらの下縁から外向きに旋回するが、扉14および16は、それぞれのヒンジ14a、16aによってハウジング12に取り付けられる。ハウジング12の前面は、開口20を含む。開口20により、比較的冷たい室内の空気を、以下で説明する熱電式冷却器内に引き込むことができる。ハウジング12は、機械10を操作するための制御パネル22、ハウジング上面にパラフィン投入開口24、およびハウジング下面にキャスタホイール26を含む。ハウジング12の下側内部27は、以下で説明するように、機械10を動作させるのに必要な様々な制御コンポーネントを含む。図2にさらに示すように、パラフィン投入部24は、液体パラフィンを保持する容器28に通じる。容器28は、液体パラフィンを維持するために、約60℃の適切な温度で加熱される。図2に全体的に示すように、入力扉16は、カセットおよびフレームアセンブリ用分配器30に通じ、出力トレイ18a、18b、18c、18d(図1)は、ハウジング12内に個々のカセットおよびフレームアセンブリ受け32a、32b、32c、32dを含む。それぞれの受け32a〜dは、2列の垂直な、ばねで付勢されたスロットを有し、各スロットは、包埋操作が完了した後で、1つのカセットおよびフレームアセンブリを保持する。機械10には、それぞれ1つまたは複数の組織標本を含むカセットおよびフレームアセンブリが、カセットおよびフレームアセンブリ用分配器30内に装填される。カセットおよびフレームアセンブリ、あるいはよりおおまかに言えば、ミクロトームにより切片化可能な支持体は、任意の適切な形態をとり得る。好ましくは、これらの支持体は、概ね特許文献1に記載されている形態のものであり、以下でさらに説明する。組織標本は、それぞれのカセットおよびフレームアセンブリ受け32a、32b、32c、32d内に個々に置かれる前に、以下で説明するコンポーネントおよび方法を用いてパラフィン中に包埋される。
【0015】
次に、図3を参照すると、ピックアンドプレイスロボット40は、3つの軸に沿って移動可能なピックアンドプレイスヘッド42を含む。具体的には、機械10の前から見ると、基部44は、水平x軸に沿ってレール46、48上を左右に動く。ピックアンドプレイスヘッド42はさらに、水平y軸に沿って、すなわち、機械10の前面に向かって、また前面から離れるようにレール56、58上を動く。垂直支持部50は、ピックアンドプレイスヘッド42を担持し、垂直z軸に沿ってレール52、54上を上下に動く。これらのそれぞれの動きを実現するために、3つの別個のモータおよび駆動ねじアセンブリ60、62、および64が設けられる。モータ60aおよび駆動ねじ60bは、レール46、48に沿って基部44を移動させる。モータ62aおよび駆動ねじ62bは、レール52、54に沿って垂直にピックアンドプレイスヘッド42を移動させる。モータ64aおよび駆動ねじ64bは、レール56、58に沿って両方向にピックアンドプレイスヘッド42を移動させる。ベルト駆動式ねじが示されているが、その代わりに直接駆動または他の任意のタイプの運動装置を使用し得ることを理解されたい。これらのモータおよび制御コンポーネントに必要な様々な電気配線にはすべて、ピックアンドプレイスロボット40の様々な動きを容易にするために、可撓性導管66、68、70が設けられる。
【0016】
依然として図3を参照すると、ピックアンドプレイスロボット40は、分配器30から、それぞれのベースモールドモジュールまたはTECユニット80に、より具体的には、各TECユニット80の上面に配置された2つの選択可能なベースモールド82、84の一方に、カセットおよびフレームアセンブリを移動させる。見やすいように、いくつかのTECユニット80は取り除いてある。複数のTECを一体化し、ユニットすなわちモジュール80にして使用すると、加熱と冷却の機能の間で複数のTECを迅速に循環させることができるので有利である。以下で説明するように、まず、各TECユニット80を使用してベースモールド82またはベースモールド84を加熱し、1つまたは複数の組織標本を含むカセット全体にわたって液体パラフィンをより完全に流入させることができる。こうすると、パラフィンが硬化した後で、その中に空気ポケットが生じない。空気ポケットは、組織学技師または病理学者によって行われる後続のステップの難点になり得る。冷却/加熱ユニットの数およびタイプは変わることがある。例えば、機械10内で処理すべきある範囲の構成および/またはサイズのカセットおよびフレームアセンブリに対応するために、ベースモールド82、84の数も、これより少なくすることもできるし、多くすることもできる。カセットおよびフレームアセンブリのサイズおよび/または構成は、このカセットおよびフレームアセンブリを対応するベースモールド82または84に移す前に、適当なセンサ86によって検出される。例えば、小型の生検カセットは、センサ86によって検出される1つまたは複数の穴を有することがあり、大型のカセットにはこのような穴がないことがある。あるいは、カセットおよびフレームアセンブリ上に、バーコードなど、機械により読取り可能な印を配置し、次いで、これらを、任意の適切な位置に取り付けられた適当な装置によって読み取ることができる。こうすると、この機械内でカセットおよびフレームアセンブリを識別かつ追跡し得る。このように、この機械の制御部は、ベースモールド82または84のいずれにカセットを置くかを識別することができる。
【0017】
(以下でより詳細に説明するやり方で)冷却工程が完了した後で、ピックアンドプレイスロボット40は、TECユニット80から、受け32a、32b、32c、32dの1つの中にあるそれぞれのスロット受け器90に、カセットおよびフレームアセンブリを移動させる。センサ92、94がそれぞれの受け32a〜d上に設けられ、それによって、関連する受け32a〜dがカセットおよびフレームアセンブリを保持しているかどうかが制御システムに示される。ハウジング12の前部で、トレイ18a、18b、18c、18dを、それらのそれぞれのカセットおよびフレームアセンブリ受け32a〜dとともに保持するために、ラッチアセンブリ96が設けられる。好ましくは、これらのラッチアセンブリ96はソレノイド動作式とし、それによって、特定のトレイ18a〜dが取り外されたかどうかを、機械10の制御システムが監視することができる。1つのトレイが取り外された場合、機械10は、動作を停止するか、あるいは少なくとも、取り外されたトレイの位置に包埋されたカセットおよびフレームアセンブリを送ることを停止し得る。
【0018】
図4、図4A、および図4Bに移ると、カセットおよびフレームアセンブリおよびそれらのそれぞれの組織標本を保持するために、複数の、例えば4つの入力バスケット100が設けられ、それによって分配が行われる。内部カバー101の開口101aから、ピックアンドプレイスヘッド42によってアクセスが行われる。各バスケット100は、扉16の内部表面上の加熱された受け器102内に保持される。好ましくは、受け器102はそれぞれ、1つまたは複数のカートリッジ形ヒータ103を含む。ヒータ103により、バスケット100およびその中のカセットおよびフレームアセンブリが、前の組織処理手順で残った残余のパラフィンを、冷却工程の開始まで液化状態に保つように設計された高温に維持される。すなわち、移動する必要がある様々なコンポーネントが目詰まりすることなく移動し得るように、パラフィンの凝固を防ぐ。受け器102間に適切な断熱部105を設けることができる。また、バスケット100および/またはその中のカセットおよびフレームアセンブリでパラフィンが凝固または部分的に凝固すると、受け器102内のバスケット100の目詰まり、または、バスケット100内のカセットおよびフレームアセンブリの目詰まりが生じやすい。バスケット100は、組織学技師などの操作者が、組織処理機から受け器102に直接移すことが好ましいが、その代わりにこの操作を自動化することができる。バスケット100は、穴が開けられており、熱、化学物質、マイクロ波その他の組織処理中に存在する環境条件に耐える適切な材料で構築されている。適切な材料は、General Electric社から入手可能なUltem(登録商標)である。バスケット100は、ヒンジ機構16a、104(図4)により扉16を開き、次いで、バスケット受け器102の上部のばね荷重によるヒンジ式閉鎖部106を開くことによってアクセスし得る。各バスケット受け器102はさらに、ばね荷重式下部保持部材110を含む。保持部材110は、バスケット100からカセットおよびフレームアセンブリが引き出されるときに外向きに開き、次いで、図に示す垂直位置に付勢され、それによって、ピックアンドプレイスヘッド42が次の連続したカセットおよびフレームアセンブリを定位置で掴めるように保持する。バスケット存在感知アセンブリ112は、扉16の内部表面に取り付けられ、バスケット100が受け器102内に下向きに完全に挿入されるときに作動し、それによって、バスケット100が存在することが制御システムに示される。このようなセンサは多くの形態をとり得るが、この場合には、バスケット100のスロット116が作動部材114(図4A)を受けてそれを下向きに移動させ、それによって、付属する要素118が垂直に移動して存在センサ119に入り感知される。
【0019】
図4にさらに示すように、位置決めアセンブリ120を使用して、各バスケット100内のカセットおよびフレームアセンブリがすべて、自動的かつ連続的にそれらの最も下の位置に移動して、個々に分配される準備が整えられるようにする。アセンブリ120は、上部プレート124および下部プレート126を含み、これらのプレートは、それぞれのロッド128a、128bによって互いに結合される。ロッド128a、128bは、それぞれのフィンガ130を担持し、旋回運動を防ぎながら垂直に移動させる。2本のロッド128a、128bに各フィンガ130を結合して示しているが、フィンガ130の旋回運動を防ぐか、あるいは他のやり方でその正しい向きを確保する他の方法を代わりに利用し得ることを理解されたい。フィンガ130は、あらかじめ荷重をかけたばね132によって下方向に付勢される。あるいは、またはそれに加えて、フィンガ130は、おもり、例えば(図示しない)1〜2ポンドのおもりを担持することができ、それによって、バスケット100内のカセットおよびフレームアセンブリ150に下向きの一定の力が加えられる。こうすると、連続したカセットおよびフレームアセンブリがそれぞれ定位置に確実に移動して、以下で説明するように、掴まれ引き出される。移動可能なプレート134は、モータ136と、ナット140にねじ込まれたねじ138とによって動作する。プレート134は、図4に示す位置から上向きに移動して、フィンガ130をそれぞれ最も上の基準位置に移動させ、それによって、受け器102からバスケット100の1つまたは複数を取り出すことができる。プレート134に剛体結合されたナット140は、フランジ部材142を担持する。フランジ部材142は、各方向においてモータ136を停止する時点を制御システムに示すために、それぞれの移動終端位置で存在センサ144、146を作動させる。
【0020】
図4Bに示すように、保持器クリップ148を使用して、バスケット100内で((図示しない)組織標本を収容する)カセットおよびフレームアセンブリ150のスタックを保持する。この説明では、カセットおよびフレームアセンブリ150を1つだけ示す。アセンブリ150は、好ましくは上記で組み込んだ特許文献1、または国際特許出願PCT/US02/30775号(この開示を参照により本明細書に全体的に組み込む)に記載されている開示に従って構築された内部カセット150aと、やはり好ましくは、上記で参照した特許または特許出願に従って構築された外部フレーム150bとを含む。バスケット100には一般に、例えば、30〜40個のカセットおよびフレームアセンブリ150を充填することになり、アセンブリ150のスタックの上部で保持器クリップ148を使用して、ハンドリング中にバスケット100内でアセンブリ150が動かないようにする。バスケット100は、1対のスロット152、154を含む。これらのスロットを通して、ピックアンドプレイスヘッド42が、最も下のカセットおよびフレームアセンブリ150を掴む。バスケット100はさらに、その内部にアクセスできるように着脱可能なカバー156を含む。カバー156はスロット156aを含む。スロット156aを通して、前に説明したフィンガ130(図4)のうち1つフィンガの延長部130aを挿入して、カセットおよびフレームアセンブリ150のスタックの上部を押し、それによって、カセットおよびフレームアセンブリ150が常に、スロット152、154に隣接する位置にくるようにして、掴む動作が行われる。カバー156の下端は、陥凹部158、160も含む。これらの陥凹部により、ピックアンドプレイスヘッド42のグリッパフィンガがアクセスを行うことができる。これを以下で説明する。
【0021】
次に図5〜図7を参照すると、ハウジング12内で移動する載置ロボット170も取り付けられている。載置ロボット170は、3つの軸(u、v、w、図6参照)に沿って移動可能な載置装置/充填装置172を含む。載置用ロボット170は、モータ174および駆動ねじ176によって、左右(w軸)にレール178、180に沿って移動可能である。載置装置/充填装置172はさらに、モータ184および駆動ねじ186によって、上下(v軸)にレール182に沿って移動可能である(図7)。載置用ロボット170は、モータ192および駆動ねじ194によって、レール188、190に沿って前後(u軸)両方向に移動可能である。可撓性導管191、193は、載置用ロボット170の動作中に必要な電気配線およびパラフィンチューブを含む。ピックアンドプレイスロボット40が、ベースモールド82または84の一方にカセットおよびフレームアセンブリ150を配置した後で、載置用ロボット170は、レール178、180および188、190に沿って、カセットおよびフレームアセンブリ150を保持するベースモールド82または84のすぐ上の適正な位置に移動する。次いで、モータ184および駆動ねじ186を使用して、載置装置/充填装置172を垂直方向に位置決めする。以下、これを説明する。
【0022】
図7から図10Aおよび図10Bを参照すると、載置装置/充填装置172は、より具体的には、レール188、190に沿って移動する4つのリニアブシュすなわちベアリングブロック188a、190aに剛体的に固定された支持アセンブリ195を含む。支持アセンブリ195は、ナット197を介してねじ194に沿って運ばれる取付け部材196にも剛体的に固定される。そのため、モータ192がナット197を貫通してねじ194を回転させると、支持アセンブリ195がレール188、190に沿って移動する。概ねU形をした支持部材198は、アセンブリ195の剛体的な一部をなしている。前に論じたように、別のモータ184により、載置装置/充填装置172を垂直に移動させるための推進力が得られる。モータ184は、支持アセンブリ195の取付け部分195aに剛体結合される取付け部分184aおよび回転可能部分184bを含む。ベアリング199は、取付け穴198b内に保持され、回転中にねじ186を支持する。モータ184の回転可能部分184bはねじ186に剛体結合し、それによって、ねじ186がU形支持部材198内で回転し得る。載置装置/充填装置172はさらに、ねじ186と係合するナット204を担持する垂直支持部材202を含む。それによって、垂直支持部材202は、垂直支持部材202に剛体的に固定されたリニアブシュ182aを介してレール182に沿って移動する。レール182は、支持アセンブリ195の一部195bに剛体的に固定される。垂直支持部材202は、ベースモールド82内でフレーム150bを貫通して、図9および図10に示す位置までカセット150aを押す4つのフィンガすなわちプッシャ203を担持する。プッシャ203を高温(例えば、60°〜65℃)で維持するために、プッシャ203にはヒータ205も結合される。活動化モータ184およびねじ186によってプッシャ203が垂直に移動して、ナット204によって担持された垂直支持部材202がレール182に沿って下向きに移動し、その結果、プッシャ203が下向きに移動してカセット150aの上部コーナ部分に当たる。同時に、垂直支持部材202は、4つのばね荷重式保持部材206(そのうち2つだけを図示する)を下向きに移動させてフレーム150bの上部コーナ部分に当て、それによって、載置/パラフィン充填工程中にフレーム150bが固定される(図10A)。この載置工程が完了した後で、カセット150aの底部が、ベースモールド84の内部でフレーム150bの外に露出される。
【0023】
この時点で、図10Bに示すように、フィンガすなわちプッシャ203を、それらはパラフィン205に接触しないが、ばね荷重式保持部材206は依然としていくらかのばね圧でフレーム150bをベースモールド84に当てて保持している位置に、モータ184によって上向きに引き抜く。次いで、液体パラフィン205をベースモールド84内に、カセット150a全体にわたって分注して組織標本210を包埋する。この目的のために、分注チューブ212は、適切なバルブ214、および容器28(図2および図3)に連結されたチューブ216(図9)からパラフィンを受け取る。パラフィンと緊密に熱接触することになるすべてのコンポーネントの場合と同様に、好ましくは、これらのコンポーネントを約60°〜65℃の高温に維持する。好ましくは、分注チューブ212は、RTDおよび温度ヒューズアセンブリ224により制御されるカートリッジヒータ220によって加熱する。必要な場合には、チューブ216も同様に加熱し得る。好ましくは、パラフィンは、重力によって分注するが、必要な場合には、ポンプを使用することができる。リミットスイッチ230、232(図9)は、垂直支持部材202の位置を、上下の制限のところで監視する。充填手順中にプッシャ203をパラフィンレベル(高さ)の上に上げるために利用する中間位置は、単にねじ186を所定の量だけ回転させることによって制御し得る。液体パラフィンのレベルが適正になる時点、すなわち、好ましくはフレーム部材150bの上面近くになる時点を感知するために、超音波レベルセンサ234(米国ニューヨーク州ロングアイランドHauppauge所在のCosense社から入手される型番ML102)を載置装置/充填装置172に取り付ける。この時点で、バルブ214を閉じて、分注チューブ212からのパラフィンの分注を停止する。各カセット150a内の組織の量に応じて、様々な量のパラフィンを各ベースモールドに加えることが必要とされることになるので、レベルを感知することが好ましい。そのため、レベルを感知することにより、ベースモールド82または84内で、パラフィンがあふれたり、パラフィンの充填が少ないことがないようにする。
【0024】
充填動作が完了した後で、TECユニット80を活動状態にして、ベースモールド84内で液体パラフィンを冷却し凝固させて硬化したブロックにする。これには、例えば1分〜3分かかることがある。TECは、ペルチェタイプの素子を使用するために加熱動作と冷却動作を反転し得るので、まず、TECユニット80を使用して、液体パラフィンがカセット150aの穴を通ってより良好に流れることができるようにベースモールド84を加熱する。加熱された状態ではパラフィンの粘度が低くなる結果、流れがより良好になる。こうすると、空気が閉じ込められることを防ぐ助けになり、好ましい固体ブロック状硬化パラフィンが最終的に確実に形成される。図8に最もよく示されているように、各TECユニット80は、2つのTECで構築される。これらのTECは、従来型のセラミック/金属プレートアセンブリを備え、ペルチェ素子として動作し、それによって、ベースモールド82、84の底面との伝導により表面が冷却(または加熱)される。各TECユニット80は、TEC236の下に、入口ファン240および出口ファン242を備えた空気流路238を含み、それによって、機械のハウジング12の前面の開口20(図1)を通して中に空気を取り込み、ハウジング12の下側部分に通じる適当な排気導管244を介してこの空気を排出する。こうすると、冷却サイクル中に、熱をユニット80から取り去るように適切に伝達させることができる。
【0025】
図11Aおよび図11Bに、カセットおよびフレームアセンブリ150を掴むのに使用する、ピックアンドプレイスヘッド42上の特定のグリップ機構250を示す。具体的には、1対の対向するグリッパフィンガ252、254は、それぞれの突起252a、252bおよび254a、254bを含む。これらの突起は、各フレーム150bのへこみ256に合う(図14)。ソレノイド260によって駆動されるオーバセンタタイプの機構を利用して、図11Aに示す開位置すなわち解放位置と、図11Bに示す閉位置すなわちグリップ位置の間でフィンガ252、254を動かす。リンク機構262、264は、図11Aに示す位置と、図11Bに示す旋回したオーバセンタ位置との間で移動する。作動部材266は、ソレノイド260の往復動作出力部268に連結され、各リンク機構262、264のそれぞれの旋回点270、272に旋回可能に連結される。各リンク機構262、264はさらに、点274、276のところでグリッパフィンガ252、254に旋回可能に連結され、そのため、作動部材266の往復運動により、リンク機構262、264が旋回し、同時に、ソレノイド出力部268がソレノイド260に対して相対的に外向きまたは内向きのいずれに動くかに応じて、グリップフィンガ252、254が内向きまたは外向きに動く。このタイプの装置の代替手段として他の多くのタイプのグリップ装置を使用し得ることを理解されたい。好ましい実施形態では、グリップ機構250上に赤外線存在センサ280も担持され、それによって、バスケット100内にカセットおよびフレームアセンブリ150が存在するかどうかが示される。存在センサ280によりカセットおよびフレームアセンブリ150が検出されない場合、制御システムは、ピックアンドプレイスロボット40に、ピックアンドプレイスヘッド42をグリップ機構250とともに次のバスケット100に移動させるように指示し得る。
【0026】
次に、前に説明した図ならびに図12〜図16に関して、機械10の動作を説明する。図4に示すように、受け器102に、それぞれいくつかのカセットおよびフレームアセンブリ150を収容する入力バスケット100が装填される。好ましくは、これらの入力バスケット100は、各カセット150a内に収容された組織標本210(図10)中の液を、周知のやり方でパラフィンその他の適切な材料で置き換えるように処理した(図示しない)組織処理機から直接持ってこられる。受け器102内にバスケット100を装填するには、入力扉16を開くことができるように、カセット位置決め装置120をその最も上の位置に上げなければならない。次いで、入力扉16を閉じた後で、位置決め装置120がプレート134を下げ、それによってフィンガ130、130aが、ばね132および/または(図示しない)おもりによって生成された力を受けて下がり得る。図12に示すように、ピックアンドプレイスヘッド42と、より具体的には、グリッパフィンガ252、254が、開口101a、およびバスケット100の1つの分配用スロット152、154(図4、図4B)に入るように、ピックアンドプレイスロボット40を移動させる。グリッパフィンガ252、254は、最も下のカセットおよびフレームアセンブリ150を掴む。次いで、ピックアンドプレイスロボット40は、掴んだカセットおよびフレームアセンブリ150をセンサ86(図3)に搬送する。カセットセンサ86からの示度に基づいて、このカセットおよびフレームアセンブリ150を、空であり、かつ検出されたカセットおよびフレームアセンブリ150の構成(例えば、サイズおよび/または形状)に対応するベースモールド82または84の一方に搬送する。ピックアンドプレイスヘッド42は、選択されたベースモールド82または84内にカセットおよびフレームアセンブリ150を落とし、初期起動中には、ピックアンドプレイスロボット40は次いで、入力バスケット100に戻り、この工程を繰り返す。正常な動作中、ピックアンドプレイスロボット40は、冷却/硬化したアセンブリ150を出力スロット90(図15)の1つに移動させ、次いで、入力バスケット100に戻る。
【0027】
その後、図6に示すように、対応するベースモールド82内に装填されたばかりのカセットおよびフレームアセンブリ150の上の定位置に、載置ロボット170が移動する。図8〜図10に関して上記で示し説明したように、カセット150aはベースモールド82内に載置し(すなわち移動し)、ベースモールド82には、分注チューブ212から液体パラフィンが充填される。センサ234によって分注動作が完了したことが検出されると、載置ロボット170は、TECユニット80の別のベースモールド82または84の上の次の位置、すなわち、ピックアンドプレイスロボット40が別のカセットおよびフレームアセンブリ150を装填したところに移動する。次いで、この連続した次のカセットおよびフレームアセンブリ150に対して、載置/充填動作を繰り返す。図14に示すように、ピックアンドプレイスヘッド42は、TECユニット80上で冷却すなわち硬化工程を完了した包埋済みカセットおよびフレームアセンブリ150の位置に移動し、グリッパフィンガ252、254を使用してこのカセットおよびフレームアセンブリ150を掴む。次いで、図15に示すように、ピックアンドプレイスロボット40は、この時点で組織標本210を収容した硬化パラフィンブロック290を含むカセットおよびフレームアセンブリ150を掴んだピックアンドプレイスヘッド42を、スロット90を有する出力トレイ18aの1つに移動させる。包埋されたカセットおよびフレームアセンブリ150は、この包埋されたカセットおよびフレームアセンブリ150と摩擦により係合するばね荷重式クリップ部材300によってスロット90内に保持される。この時点で、グリッパフィンガ252、254は、カセットおよびフレームアセンブリ150を解放する。図16に示すように、ソレノイド96を作動させ、トレイ18aを外向きに旋回させ、機械11からトレイ18aを持ち上げることによって、出力トレイ18aを取り出すことができる。
【0028】
機械10の動作は、図17に示すシステム制御部350によって制御される。システム制御部350は、例えばタッチスクリーンモニタなどのユーザI/O 354に接続された制御部352を含む。制御部352は、任意選択で、イーサネット(登録商標)356にも接続され、それによって、制御部352と(図示しない)別のコンピュータの間で通信が行われる。制御部352は、様々なセンサから機械10に関する入力を受け取る。例えば、超音波受信機358は、パラフィン充填センサ234および貯留器レベルセンサ359から入力を受け取る。他の制御入力は、デジタルI/Oインターフェース360に接続される。デジタルI/Oインターフェース360は、例えば、フレーム/カセットセンサ86、受けセンサ92、94、フレーム存在センサ280、およびバスケット存在センサ112など、様々なセンサに接続される。
【0029】
制御部352は、ステップモータコントローラ362にコマンド信号を提供し、ステップモータコントローラ362は、同等のコマンド信号を、ステップモータ60a、62a、64a、および192、174、184、ならびに136に周知のやり方で提供する。コントローラ362は、リミットスイッチ、例えば、v軸に沿った移動制限を検出するリミットスイッチ230、232からフィードバック信号を受け取る。さらに、エンコーダ364は、それぞれのステップモータに接続され、それぞれのステップモータコントローラ362にそれぞれのフィードバック信号を提供し、それによって、各ステップモータの指令された動きを確認することができる。ステップモータコントローラ362が、それぞれのステップモータの指令された動きを検出し損なった場合、このコントローラは、エラー信号を制御部352に戻し、それがモニタ354上に表示される。
【0030】
制御部352はさらに、8対の各ベースモールド82、84に関連する16個のTECプレート236それぞれの動作を制御する熱電式3状態コントローラ366に接続される。各TECプレート236は、対応するRTD368を有する。RTD368は、そのそれぞれのTECプレート236の温度を表す温度フィードバック信号をコントローラ366に提供する。図18を参照すると、熱電式3状態コントローラ366は、クロック372によって駆動されるマイクロコントローラ370を有する。この機械は、16個しかTECプレート236を備えないが、コントローラ366は、24個のTECプレート236に対応するように構築されていることに留意されたい。マイクロコントローラ370は、システムインターフェース374と、TECループ状態機械376と、較正アルゴリズム378と、A/Dコンバータおよび信号処理装置380とを提供するソフトウエアモジュールを含む。コントローラ370は、16個すべてのTECプレート236を制御し、TECプレート236の数がこれより多くても少なくてもそれらを制御するように構成し得る。このような多数の装置、すなわち、24個のTECプレート236および24個のRTD368に対応するために、マイクロコントローラ370と、TECプレート236およびRTD368との間のインターフェース装置として「CPLD」(複雑なプログラム可能な論理回路)388を使用する。ループクロック382は、CPLD388のループクロック状態機械393によって調整可能な連続した時間窓を提供する。各時間窓中、マイクロコントローラ370からのコマンドに応答して、CPLD388内のA/Dコンバータ状態機械389により、すべてのRTDからの出力が多重化されてA/Dコンバータ384に入る。各時間窓中、RTD出力は、マイクロコントローラ370の一部として制御部352からのコマンドに応答して各TECプレート236の動作を調整するマイクロコントローラ370によって読み取られる(図17)。いずれかのTECプレート236の動作状態が変化した場合、TECインターフェース392内のMOSFET電流スイッチ395の状態が変化するはずであり、この新しい状態は、CPLD388のMOSFET制御状態機械391に転送される。次いで、この新しい状態は、それぞれの駆動部390を介してそれぞれの電流スイッチ395に供給される。このように、それぞれのRTD368から提供される温度の測定値は、制御部352によって指令される温度に密接に一致して維持される(図17)。
【0031】
再度図17を参照すると、制御部352により、グリッパソレノイド260、パラフィンバルブ214、および4つのトレイラッチソレノイド97のそれぞれに動作可能に接続されたソレノイド駆動部394にコマンド信号が提供される。図19を参照すると、このソレノイド駆動部は、システムインターフェース400、グリッパ制御部402、パルス幅変調器404、406、およびI/O制御部408を提供するソフトウエアモジュールを含むマイクロコントローラ398用のクロック397を有する。I/O制御部408は、I/Oインターフェース410に出力信号を提供して、ソレノイド状態LED412を駆動する。機械10内の熱を最小限に抑えるために、ソレノイド駆動部394は、機械10の様々なソレノイドを動作させるのに必要な最小電流を提供するように設計される。例えば、グリッパ制御部402は、まず、駆動部414に作動電流を提供し、次いで駆動部414は、増幅器415を介してグリッパソレノイド260に出力電流を提供することによってソレノイド260を動作させる。この作動電流は、迅速に、ソレノイド260およびグリッパ250を作動させ、それらの状態を変更するのに有効である。その後、グリッパ制御部402は、駆動部416に保持電流を提供し、次いで駆動部416は、ソレノイド260をその現在の状態で保持するのに必要な最小電流を提供する。
【0032】
4つのトレイラッチの1つを開くように要求する信号は、入力装置417、例えば、機械上の押しボタンまたはユーザI/O 354(図17)のタッチスクリーン上のボタンによって提供することができる。この要求に応答してマイクロコントローラ398は、「PWM」(パルス幅変調器)404を動作させて、PWM選択スイッチ418に出力信号を提供し、次いで、PWM選択スイッチ418は、増幅器422を介してMOSFET電流スイッチ423の適切な1つに作動電流および保持電流を提供する。このMOSFET電流スイッチ423は、4つのトレイラッチソレノイド97の1つを動作させてラッチすなわちインターロックを解除し、それによって、トレイを外向きに旋回させ、取り出すことができる。同様に、制御部352からのコマンドに応答してマイクロコントローラ398は、PWM406を動作させて、双方向PWM選択スイッチ420、増幅器424、およびMOSFET電流スイッチ425を介してバルブソレノイド215に作動電流および保持電流の信号を提供する。
【0033】
再度図17を参照すると、ヒータコントローラ426は、制御部352からのコマンドに応答して、貯留器28、バルブ214、ノズル212、供給チューブ216、および入力扉16上の8個の受け器102に関連するヒータ220を制御する。ヒータコントローラ426は、ヒータ220をオンオフ制御するように動作して、制御部352によって指令された温度を維持する。これらのヒータは、抵抗性のACヒータおよびDCヒータであり、RTD124は、ヒータ220のそれぞれに近接して配置され、それによって、加熱中のそれぞれの装置の温度を表す温度フィードバック信号が提供される。ヒータ制御コントローラがこのような多数のヒータおよびRTDを制御するために、図18のTECコントローラに関して説明したものと類似のやり方でループ状態機械およびCPLDを使用し得る。ゼロ交差式のTRIAC電流スイッチを周知のやり方で使用して、DCヒータおよびACヒータの動作をそれぞれ制御することができる。
【0034】
使用に際して、受け器102にバスケット100を装填するために、操作者は、タッチスクリーンモニタ354を使用して、カセット位置決め装置120に、その最も高い位置に上がるように指令し、それによって入力扉16を開くことができる。機械10内にバスケット100を配置した後で、入力扉16を閉じる。操作者は再度、タッチスクリーンモニタを使用して位置決め装置120に、プレート134を下げるように指令し、それによって、フィンガ130、130aが、ばね132および/または(図示しない)おもりによって生成された力を受けて下げられる。カセット位置決め装置120を移動させ、入力扉16を開閉する工程は、完全に自動化し得ることが理解されよう。その上で、操作者が、機械10に出力トレイ18を装填する。
【0035】
フレームおよびカセットアセンブリ150の処理は、3つの動作モードで行われる。第1のモールド装填モードでは、バスケット100から、8対の各モールドのモールド82、84(図3)の一方にフレームおよびカセットアセンブリを連続して移し、充填/冷却サイクルを開始する。8個のモールド82または84の装填、充填、および冷却の後で、制御部352は、モールド82または84から出力トレイ18に、冷却されたフレームおよびモールドアセンブリ150を連続して移動させる連続処理モードを開始する。空になったモールドには直ちに、バスケット100から別のフレームおよびカセットアセンブリ150を装填し直し、この連続モードを、バスケット100からアセンブリ150のすべてが取り出されるまで継続する。その後、制御部352は、残っている冷却済みフレームおよびカセットアセンブリを、モールド82、84からトレイ18に移動させるモールド取出しモードを開始する。
【0036】
処理を開始するために、この場合も操作者は、タッチスクリーンモニタ354を使用してサイクルの開始を指令する。このコマンドに応答して、制御部352は、図20に示すように、モールド装填サイクルを実行する。制御部352は、まずステップ450で、リミットスイッチ364の状態を監視することによって、搬送ロボット40および載置ロボット170が、それらの基準位置にあるかどうかを判定する。搬送ロボット40の基準位置は、充填すべき第1モールドに最も近いx軸移動制限、z軸の上限、および機械10に対して相対的に前方のy軸の制限のところで定義する。載置ロボット170の基準位置は、充填すべき最後のモールドに最も近いx軸移動制限、z軸の上限、および機械10に対して相対的に前方のy軸の制限のところで定義する。これらのロボットのいずれかがその基準位置にない場合、制御部352はステップ452で、ステップモータコントローラ362に、ステップモータを動作させ、これらのロボットをそれらの基準位置に移動させるコマンド信号を提供する。ステップ454において一時停止タイマが動作していないことを確認した後で、制御部352はステップ456で、コントローラ362に、バスケット100に隣接する開口101(図4)の外側だが、そのすぐ隣の位置にグリッパ250を移動させるように指令する。その後、制御部352は、ステップ458で、図21により詳細に示す入力バスケット取上げサブルーチンを実行する。
【0037】
このサブルーチンの実行に際して、制御部352はまずステップ602で、ソレノイド駆動部394に、グリッパソレノイド260を作動させ、グリッパフィンガ252を開くように指令する(図11A)。その後、制御部352はステップ604で、適切なコントローラ362に、ステップモータ64aを動作させ、開口101aを通してバスケット100内にグリッパフィンガ252を移動させるように指令する(図12)。次いで、制御部352はステップ606で、グリッパフィンガ252に閉じるように指令し(図11B)、ステップ608で、ステップモータ64aに、その動きを反転し、グリッパフィンガ252を開口101aのすぐ隣のグリッパフィンガ252の元の位置に戻すように指令する。その後、制御部352はステップ610で、グリッパ250上に配置されたフレームセンサ280の状態を読み取る。図20のモールド装填サイクルの動作は、制御部352がステップ460で、フレーム150bがグリッパ250内に存在するかどうかを判定するまで継続する。
【0038】
フレーム150bがグリッパ250内に存在する場合、制御部352はステップ462で、ステップモータに、グリッパ250をカセットセンサ86(図3)に移動させるように指令する。ステップ464で制御部352は、図22により詳細に示すカセット装填テストサブルーチンを実行する。いくつかのテストは、フレームおよびカセットアセンブリ150がグリッパ250内で正しい向きになっていることをステップ620で確認するためにセンサ86を使用して実施する。例えば、アセンブリ150は、不注意で上下逆さまに装填されていたり、不注意で前後が回転していることがあり得る。次に、制御部はステップ622で、カセット150a(図4B)がフレーム150b内に配置されていることを確認する。グリッパ250上のセンサ280は、フレームおよびカセットアセンブリ150のフレーム部分150bの存在を検出することしかできない。したがって、フレーム150bが、確かにカセット150aを支持していることを確認することが重要である。さらに、機械10は、2種類の異なるサイズのカセットを処理し得る。したがって、制御部352はステップ624で、センサ86を使用して、どちらのサイズのカセットが現在グリッパ内にあるかを検出し得るようにグリッパ250を操作する。サイズが検出されると、ステップ626、628で適切なフラグが設定される。これらのテストのいずれかでエラーが検出されると、制御部352はステップ630で、モニタ354上にこのエラーを表示し、このエラーが是正されるまで、制御部352の動作サイクルを停止する。
【0039】
図20のモールド装填サイクルに戻ると、カセット装填テストがうまく完了した後で、制御部352はステップ466で、グリッパ250に、空であり、かつ検出されたカセットサイズに対応するモールド対の1つ、例えば第1のモールド82(図3)の上の垂直逃げ位置に移動するように指令する。さらに、制御部352は、載置ロボット170に、その基準位置から、モールド82のすぐ隣の位置の右側に移動するように指令する。さらに、制御部352は、熱電式コントローラ366に、モールド82に関連するTECプレート236をオンにするように指令する出力信号を提供する。熱電式コントローラ366は、RTD368からの温度フィードバック信号を使用して、モールド82が所望の温度に加熱されるようにTECプレート236を動作させる。
【0040】
搬送ロボット40がグリッパを垂直逃げ位置に移動させた後で、制御部352はステップ468で、図23により詳細に示す、モールド内にフレームを装填するサブルーチンを実行する。まず、制御部352はステップ632で、ステップモータ62aに、フレームおよびカセットアセンブリ150が、モールド82a上、またはそのわずかに上にくるようにグリッパ250を下げるように指令する(図13)。その後、制御部352はステップ634で、グリッパフィンガ252に開くように指令し(図11A)、次いで、ステップ636で制御部352は、ステップモータ62aの動作を反転して、グリッパ250をその垂直逃げ位置に上げる。次いで、制御部352はステップ638で、フレームセンサ280を読み取って、フレーム150bがグリッパ250内にもはや存在しないことを確認する。フレームが検出された場合には、制御部352はステップ640で、適切なエラー信号を表示し、動作を中止する。
【0041】
次に、制御部352は、ステップモータ174に、載置ロボット170をモールドの上に移動させるように指令する。その後、制御部はステップ472で、内部一時停止タイマをスタートさせ、次いでステップ474で、図24により詳細に示すモールド充填サイクルサブルーチンを開始する。このモールド充填サイクルを実行する際に、制御部352はまずステップ650で、ステップモータ184に、載置装置/充填装置172を下げるように指令する(図8)。垂直支持部材202は、4つのバネ荷重式保持部材206を下向きに移動させてフレーム150bの上部コーナに当て、それによって、パラフィン充填工程中にこのフレームを固定する。同時に、プッシャ203(図9)が下向きに移動して、カセット150aの上部コーナ部分に当たり、それによって、カセットおよびフレームアセンブリ150がモールド84内に強く押し付けられる。次いで、制御部352はステップ652で、モータ184に、充填処理中にプッシャ203がパラフィンに接触しない位置に載置装置/充填装置172を上げるように指令する。保持部材206は、依然としてばね圧でモールドに当ててフレーム150bを保持していることに留意されたい。その後、ステップ654で制御部352は、パラフィンバルブ214を開き、かつモールドにパラフィンの充填を開始する(図10)ように指令する出力信号をソレノイド駆動部394に提供する。さらに、制御部352は、内部冷却開始タイマの動作をスタートさせる。モールド充填サイクルが終了する少し前に、モールドの冷却を開始すると、処理の品質がより高くなることが実験からわかっている。ただし、TECを冷却モードに切り替えるべき厳密な時点は、応用例に依存する。したがって、制御部352がステップ656で、冷却開始タイマが終了したことを確認した後で、制御部352はステップ658で、それぞれのTECプレート236の動作を加熱モードから冷却モードに切り替え、さらに、冷却停止用内部タイマの動作をスタートさせる。次いで、制御部352はステップ660で、制御部352が、パラフィン充填センサ234から、モールド84が充填されたことを示す信号を受け取る時点を確認する。この時点で、制御部352はステップ662で、ソレノイド駆動部394に、充填バルブを閉じるように指令する出力信号を提供する。さらに、制御部352は、ステップモータ184に、載置装置/充填装置172をその最も高い位置に上げるように指令する。
【0042】
図20に戻ると、モールド充填サイクルサブルーチン476を開始した後で、制御部352は、現在充填中のモールドが、充填すべき最後のモールドかどうかも判定する。そうでない場合には、制御部はステップ454で、一時停止タイマが終了したかどうかを判定する。この一時停止タイマは、単に搬送ロボット40の動作をある短い期間だけ一時停止させるだけである。一時停止タイマが終了すると、制御部は、ステップモータ60a、62a、64aに、バスケットの開口に隣接する位置にグリッパを移動させるように指令する。8個のモールド位置ごとに、ステップ454〜476に関して説明した処理を繰り返す。制御部352がステップ476で、最後のモールドが充填中であることを検出すると、制御部はステップ478で、モータ60aに、グリッパ250を第1モールドの上の垂直逃げ位置に移動させるように指令し、その後で、図20のモールド装填サイクルを終了する。ステップ460で制御部352が、グリッパ250内にフレーム150bが存在しないと判定した場合、制御部352はステップ480で、現在のバスケットが空かどうかを調べることに留意されたい。制御部352は、現在のバスケットから取り出したフレームおよびカセットアセンブリ150の数を保持している。現在のバスケットから、その最大容量に等しい数のフレームおよびカセットアセンブリが取り出されると、制御部はステップ482で、すべてのバスケットが空かどうか確認する。そうでない場合には、制御部は、グリッパに、入力扉16上の隣接するバスケットの開口に移動するように指令する。
【0043】
すべてのモールドが、まずフレームおよびカセットアセンブリで埋められ、充填サイクルが開始された後で、制御部352は、図25に示すように、連続稼働モードに切り替わる。このモードの第1ステップは、ステップ500で、モールド装填モードが完了したことを確認することである。搬送ロボット40が現在、第1モールドの上で垂直逃げ高さに位置していることを想起されたい。次いで、制御部352はステップ502で、このモールド用の冷却停止タイマが終了したかどうかを判定する。これが確認されると、制御部はステップ504で、図26に示す、モールドからフレームを取り出すサブルーチンを実行する。
【0044】
図14に示すように、モールド84からフレームおよびカセットアセンブリを取り出すために、制御部352は、ステップ670〜676で出力信号を提供して、グリッパフィンガ252に開くように指令し、ステップモータ64aにこのグリッパをモールドに下げるように指令し、グリッパフィンガ252に閉じるように指令し、ステップモータ62aにこのグリッパをその垂直逃げ位置に上げるように指令する。その後、制御部352は、フレームセンサ280の状態を読み取って、フレームが存在するかどうかを判定する。存在しない場合には、制御部はステップ680で、エラーを表示し、このサイクルを終了する。
【0045】
図25に戻ると、その後、制御部はステップ506で、ステップモータ60a、62a、64aに、グリッパをセンサ86(図3)に移動させるコマンド信号を提供する。この位置で、制御部352はステップ508で、図27により詳細に示すカセット取出しテストサブルーチンを開始する。まず、制御部352は、ステップモータ60a、62a、64aに、制御部352がステップ682でセンサ86からの出力信号を監視することによってフレーム150bが存在することを確認し得るように、センサ86に対してグリッパ250を移動させるように指令する。その後、制御部は、グリッパ250に、制御部352がステップ684でこのフレーム内にカセット150aが存在するかどうかを判定し得る位置に移動するように指令する。充填/冷却工程中に、あるいは、取出し工程中に、フレームからカセットが分離することがあり得る。フレームがグリッパ内で正しく保持されていないこともあり得る。例えば、図11Aを参照すると、フレーム150bは、グリッパの前方のピン252a、254aによってのみ保持されることがある。この状況では、このフレームはわずかに回転しており、そのため、後方のピン252b、254bがフレームに正しく固定されない。この状況を検出するために、制御部352は、グリッパ250に、制御部がステップ686でグリッパ内にフレームが正しく固定されていることを確認し得る位置に移動するように指令する。なんらかのエラーが検出される場合、制御部はステップ688で、モニタ354上にエラーを表示し、このサイクルを終了する。
【0046】
カセット取出しテストサブルーチンがうまく実行された場合、図25に戻ると、制御部352は、モータ60a、62a、64aに、この時点で組織標本210を収容する硬化したパラフィンブロック290を含むカセットおよびフレームアセンブリ150とともにグリッパを、図15に示すように、出力トレイ18aの1つのトレイのスロット90の1つに隣接して移動させるように指令する。その後、制御部352は、図28により詳細に示すフレーム解放サブルーチンを開始する。フレームおよびカセットアセンブリ150を解放するために、制御部352はまずステップ690で、ステップモータ62aに、トレイスロット90内にグリッパフィンガ25を移動させるように指令する。包埋されたカセットおよびフレームアセンブリ150は、この包埋されたカセットおよびフレームアセンブリ150と摩擦により係合するバネ荷重式クリップ部材300によってスロット90内に保持される。その後ステップ692で、制御部は、グリッパフィンガ252に開くように指令し、さらにステップ694で、ステップモータ62aに動きを反転するように指令して、トレイスロットからグリッパフィンガを取り出す。次に、制御部352はステップ696で、フレームセンサ280の状態を読み取って、フレームが存在するかどうかを判定する。フレームが検出された場合、制御部352は、モニタ354にエラーを表示する。
【0047】
図25に戻ると、次いで制御部はステップ514で、ステップモータ60a、62a、64aに、グリッパをバスケット開口に移動させるコマンド信号を提供する。搬送ロボット40は続いて、制御部352からのコマンドに応答して、ステップ514〜532に従って、入力バスケットから別のフレームおよびカセットアセンブリを装填する。この装填動作は、図20のステップ456〜470に関して前に説明した装填動作と同じである。第1モールド内に別のフレームおよびカセットアセンブリ150を装填した後で、制御部はステップ534で、図24に関して前に説明したモールド充填サイクルを開始する。このモールド充填サイクルを開始するのと同時に、制御部352はステップ536で、ステップモータ60aに、空にすべき次のモールドの上にグリッパを移動させるコマンド信号を提供する。次いで、制御部はステップ502で、このモールド用の冷却停止タイマが終了したかどうかを判定する。ステップ502〜536の処理は、制御部352がステップ522で、すべての入力バスケットが空になったことを確認するまで継続する。この時点で連続稼働モードが終了し、制御部352は、図29に示す、モールドを空にするサイクルに切り替わる。
【0048】
ステップ540で、連続稼働モードが完了したことを確認した後で、制御部352はステップ542で、ステップモータ174、184、および192に、載置ロボットをその基準位置に移動させるように指令する。その後、制御部352はステップ544で、現在のモールド用の冷却停止タイマが終了したかどうかを判定する。終了している場合、制御部352は、図25に関して前に説明した処理ステップ504〜512と同じ処理ステップ546〜554に従って、このモールドからフレームを取り出す。この処理は、制御部352がステップ556で、すべてのモールドが空であることを検出するまで反復する。この時点で、機械10から出力トレイを取り出すことができる。図16に示すように、出力トレイ18aは、ソレノイド96を作動させ、トレイ18aを外向きに旋回させ、機械10からトレイ18aを持ち上げることによって取り出すことができる。
【0049】
好ましい実施形態を説明することによって本発明を説明し、この実施形態をいくらか詳細に説明してきたが、本出願人の意図は、このような細部に添付の特許請求の範囲の範囲を限定することではなく、また、いかなる形でも制限することではない。当業者には、追加の利点および改変形態が容易に明らかになるであろう。本発明の様々な特徴は、使用者の要求および選好に応じて、単独で用いることもできるし、様々な組合せで用いることもできる。例えば、上記で説明した実施形態では、8対のモールドを使用して、2種類の異なるカセットサイズのカセットに対応する。他の実施形態では、8列のモールドのそれぞれに3つのモールドを有する行列で、24個のモールドを提供することによって、3種類の異なるカセットサイズに対応し得ることを理解されたい。
【0050】
上記で説明した実施形態では、センサ86を使用して、フレームおよびカセットアセンブリを、バスケットから取り上げた後と、モールドから取り出した後でテストする。別の位置に別のセンサを配置して、モールドから取り出した後でフレームおよびカセットアセンブリをテストすることができることを理解されたい。機械10のサイクルタイムを改善するために、このような異なるセンサが望ましいことがある。さらに、異なるタイプのセンサでは、フレームおよびカセットアセンブリを確認する工程を変更し得ることを理解されたい。
【0051】
以上、本発明を、本発明を実施する現時点で好ましい方法とともに説明した。ただし、本発明自体は、添付の特許請求の範囲によってのみ定義されるべきである。
【図面の簡単な説明】
【0052】
【図1】組織標本をハンドリングし包埋するために、本発明の好ましい実施形態に従って構築された自動機械の斜視図である。
【図2】機械の内部を示す斜視背面図である。
【図3】見やすいように、機械のハウジングの外側パネルを取り外し、制御コンポーネントのハウジング部分も取り外した状態の拡大斜視背面図である。
【図4】機械の入力扉部分の分解斜視図である。
【図4A】入力扉の内部表面の分解斜視図であり、カセットおよびフレームアセンブリ分配器を示す。
【図4B】入力バスケットの1つの斜視図であり、1つのカセットおよびフレームアセンブリおよびバスケット内に挿入される保持器クリップを示す。
【図5】機械内部の上面図である。
【図6】機械内の載置用ロボットの拡大斜視図である。
【図7】載置装置/充填装置を備えた載置用ロボットの分解斜視図である。
【図8】概ね図6の線8〜8に沿って切断した断面図である。
【図9】カセットをそれに関連するフレームを貫通してベースモールド内に載置させるところを示す図8に類似の拡大断面である。
【図10A】図9に類似の拡大断面図であり、載置動作も漸進的に示す。
【図10B】図9に類似の拡大断面図であり、載置動作も漸進的に示す。
【図11A】図12の線11A〜11Aに沿って切断した断面図であり、カセットおよびフレームアセンブリを掴む直前のグリッパアセンブリを示す。
【図11B】グリッパフィンガによってカセットおよびフレームアセンブリを掴むところを示す、図11Aに類似の部分的に断面で示す上面図である。
【図12】図5の線12−12に沿って切断した断面図であり、入力バスケットからカセットおよびフレームアセンブリを取り出す工程におけるグリッパアセンブリを示す。
【図13】グリッパアセンブリが、TEC(熱電式冷却)ユニットに付随するベースモールド内にカセットおよびフレームアセンブリを配置するところを示す拡大斜視図である。
【図14】冷却動作が完了した後で、カセットおよびフレームアセンブリが、グリッパアセンブリによって取り出されるところを示す拡大斜視図である。
【図15】機械内で、包埋工程が完了したカセットおよびフレームアセンブリを受け取る出力トレイの断面図である。
【図16】機械から出力トレイを取り出すところを示す、図15に類似の断面図である。
【図17】図1の機械の制御システムの概略ブロック図である。
【図18】図17の制御システムで使用する熱電式3状態コントローラの概略ブロック図である。
【図19】図17の制御システムで使用するソレノイド駆動部の概略ブロック図である。
【図20】図1の機械内でバスケットからモールド内にフレームおよびカセットアセンブリを連続して装填するために、図17の制御システムによって実行される工程を示す流れ図である。
【図21】図1の機械内で入力バスケットからフレームおよびカセットアセンブリを取り上げるために、図17の制御システムによって実行される工程を示す流れ図である。
【図22】図1の機械内で入力バスケットから取り上げられたフレームおよびカセットアセンブリをテストするために、図17の制御システムによって実行される工程を示す流れ図である。
【図23】図1の機械内でモールド内にフレームおよびカセットアセンブリを装填するために、図17の制御システムによって実行される工程を示す流れ図である。
【図24】図1の機械内でモールド内にパラフィンを分注するために、図17の制御システムによって実行される工程を示す流れ図である。
【図25】図1の機械内でフレームおよびカセットアセンブリを連続して装填し、充填し、取り出すために、図17の制御システムによって実行される工程を示す流れ図である。
【図26】図1の機械内でモールドからフレームおよびカセットアセンブリを取り出すために、図17の制御システムによって実行される工程を示す流れ図である。
【図27】図1の機械内でモールドから取り出された充填済みフレームおよびカセットアセンブリをテストするために、図17の制御システムによって実行される工程を示す流れ図である。
【図28】図1の機械内で出力トレイ内に充填済みフレームおよびカセットアセンブリを挿入するために、図17の制御システムによって実行される工程を示す流れ図である。
【図29】図1の機械内でモールドから出力トレイに充填済みフレームおよびカセットアセンブリを連続して移すために、図17の制御システムによって実行される工程を示す流れ図である。
【符号の説明】
【0053】
10 自動機械
12 ハウジング
14 主扉
14a ヒンジ
16 入力扉
16a ヒンジ
18a 出力トレイ
18b 出力トレイ
18c 出力トレイ
18d 出力トレイ
20 開口
22 制御パネル
24 パラフィン投入開口
26 キャスタホイール
27 ハウジング下側内部
28 容器
30 カセットおよびフレームアセンブリ分配器
32a カセットおよびフレームアセンブリ受け
32b カセットおよびフレームアセンブリ受け
32c カセットおよびフレームアセンブリ受け
32d カセットおよびフレームアセンブリ受け
40 ピックアンドプレイスロボット、搬送ロボット
42 ピックアンドプレイスヘッド
44 基部
46 レール
48 レール
50 垂直支持部
52 レール
54 レール
56 レール
58 レール
60 モータおよび駆動ねじアセンブリ
60a モータ
60b 駆動ねじ
62 モータおよび駆動ねじアセンブリ
62a モータ
62b 駆動ねじ
64 モータおよび駆動ねじアセンブリ
64a モータ
64b 駆動ねじ
66 可撓性導管
68 可撓性導管
70 可撓性導管
80 TECユニット
82 ベースモールド
84 ベースモールド
86 フレーム/カセットセンサ
90 スロット受け器
92 受けセンサ
94 受けセンサ
96 ラッチアセンブリ
97 トレイラッチソレノイド
100 入力バスケット
101 内部カバー
101a 開口
102 加熱受け器
103 ヒータ
104 ヒンジ機構
105 断熱部
106 閉鎖部
110 保持部材
112 バスケット存在感知アセンブリ、バスケット存在センサ
114 作動部材
116 スロット
118 付属要素
119 存在センサ
120 位置決めアセンブリ、カセット位置決め装置
124 上部プレート
126 下部プレート
128a ロッド
128b ロッド
130 フィンガ
130a 延長部
132 ばね
134 移動可能なプレート
136 モータ
138 ねじ
140 ナット
142 フランジ部材
144 存在センサ
146 存在センサ
148 保持器クリップ
150 カセットおよびフレームアセンブリ
150a 内部カセット
150b 外部フレーム
152 スロット
154 スロット
156 カバー
156a スロット
158 陥凹部
160 陥凹部
170 載置ロボット
172 載置装置/充填装置
174 モータ
176 駆動ねじ
178 レール
180 レール
182 レール
182a 直線ブッシュ
184 モータ
184a 取付け部分
184b 回転可能部分
186 駆動ねじ
188 レール
188a リニアブシュ、ベアリングブロック
190 レール
190a リニアブシュ、ベアリングブロック
191 可撓性導管
192 モータ
193 可撓性導管
194 駆動ねじ
195 支持アセンブリ
195a 取付け部分
195b 支持アセンブリの一部
196 取付け部材
197 ナット
198 支持部材
198b 取付け穴
199 ベアリング
202 垂直支持部材
203 フィンガ、プッシャ
204 ナット
205 ヒータ、液体パラフィン
206 保持部材
210 組織標本
212 分注チューブ、ノズル
214 バルブ
215 バルブソレノイド
216 チューブ
220 カートリッジヒータ
224 RTD/温度ヒューズアセンブリ
230 リミットスイッチ
232 リミットスイッチ
234 超音波レベルセンサ、パラフィン充填センサ
236 TEC
238 空気流路
240 入口ファン
242 出口ファン
244 排気導管
250 グリップ機構
252 グリッパフィンガ
252a 突起、ピン
252b 突起、ピン
254a 突起、ピン
254a 突起、ピン
256 へこみ
254 グリッパフィンガ
260 ソレノイド
262 リンク機構
264 リンク機構
266 作動部材
268 往復動作出力
270 旋回点
272 旋回点
274 旋回点
276 旋回点
280 赤外線存在センサ、フレーム存在センサ
290 硬化パラフィンブロック
300 クリップ部材
350 システム制御部
352 制御部
354 ユーザI/O、タッチスクリーンモニタ
356 イーサネット(登録商標)
358 超音波受信機
359 貯留器レベルセンサ
360 デジタルI/Oインターフェース
362 ステップモータコントローラ
364 エンコーダ
366 熱電式3状態コントローラ
368 RTD
370 マイクロコントローラ
372 クロック
374 システムインターフェース
376 TECループ状態機械
378 較正アルゴリズム
380 A/Dコンバータと信号処理装置
382 ループクロック
384 A/Dコンバータ
388 CPLD
389 A/Dコンバータ状態機械
390 駆動部
391 MOSFET制御状態機械
392 TECインターフェース
393 ループクロック状態機械
394 ソレノイド駆動部
395 MOSFET電流スイッチ
397 クロック
398 マイクロコントローラ
400 システムインターフェース
402 グリッパ制御部
404 パルス幅変調器
406 パルス幅変調器
408 I/O制御部
410 I/Oインターフェース
412 ソレノイド状態LED
414 駆動部
415 増幅器
416 駆動部
417 入力装置
418 PWM選択スイッチ
420 双方向PWM選択スイッチ
422 増幅器
423 MOSFET電流スイッチ
424 増幅器
425 MOSFET電流スイッチ
426 ヒータコントローラ
【特許請求の範囲】
【請求項1】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数の冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項2】
請求項1に記載の自動機械において、
前記冷却ユニットがそれぞれ、少なくとも1つのTECを含む自動機械。
【請求項3】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記包埋組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項4】
請求項3に記載の自動機械において、
前記載置装置および前記分注器が、前記複数の冷却ユニット間を一緒に移動可能である自動機械。
【請求項5】
請求項1に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項6】
請求項2に記載の自動機械において、
各TECに熱的に結合されたそれぞれのモールドをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項7】
請求項1に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項8】
請求項7に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項9】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項10】
請求項1に記載の自動機械において、
該機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項11】
請求項1に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項12】
請求項1に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項13】
請求項1に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項14】
請求項13に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項15】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された穴あき入力部材を備え、前記穴あき入力部材がさらに、組織処理機に受けられるように構築され、前記組織処理機内での前記組織の固定および処理に用いる手順による劣化に耐えることができ、該自動機械がさらに、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項16】
請求項15に記載の自動機械において、
前記冷却ユニットがTECを含む自動機械。
【請求項17】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項18】
請求項17に記載の自動機械において、
前記載置装置が前記分注器を含む自動機械。
【請求項19】
請求項15に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項20】
請求項15に記載の自動機械において、
前記冷却ユニットが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成されたモールドを含む自動機械。
【請求項21】
請求項15に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項22】
請求項21に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項23】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項24】
請求項15に記載の自動機械において、
前記機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
前記冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項25】
請求項15に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器を備える自動機械。
【請求項26】
請求項15に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項27】
請求項15に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項28】
請求項27に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項29】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、ミクロトームにより切片化可能な各支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数のTECユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つのミクロトームにより切片化可能な支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記冷却ユニット間で移動するように取り付けられた載置装置であって、前記第1位置から前記第2位置に前記支持体を移動させるように動作する設定ヘッドと、前記包埋操作中に、前記ミクロトームにより切片化可能な支持体、および前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを含む載置装置とを備える自動機械。
【請求項30】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項31】
請求項29に記載の自動機械において、
前記TECユニットがそれぞれ、熱電式制御部によって動作される冷却プレートを伴う支持部材と、前記冷却プレートに結合されたモールドとをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項32】
請求項29に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な支持体のスタックを垂直に保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項33】
請求項32に記載の自動機械において、
前記細長いバスケットが、その下端に分配用の開口を含み、
前記下端に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された移動可能な部材をさらに備える自動機械。
【請求項34】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項35】
請求項29に記載の自動機械において、
前記機械内で、少なくとも2つの異なるサイズの、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各TECユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な1つの構成の支持体を受けるように構成され、前記第2モールドが、ミクロトームにより切片化可能な異なる構成の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な支持体の前記構成を検出するように動作するセンサを備え、前記キャリアアセンブリが、前記センサによって検出された前記構成に応答して、前記ミクロトームにより切片化可能な支持体の1つを、前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項36】
請求項29に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項37】
請求項29に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項38】
請求項29に記載の自動機械において、
前記TECユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を準備した後で、前記出力部材から取り出すことができる自動機械。
【請求項39】
請求項38に記載の自動機械において、
前記入力および出力部材がそれぞれ、前記キャビネット構造のヒンジ式の扉を備える自動機械。
【請求項40】
ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項41】
請求項40に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項42】
請求項40に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項43】
フレーム部材内に収容された、ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記組織標本が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各支持体およびその上に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能な支持体を載置するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項44】
請求項43に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項45】
請求項43に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項46】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を取り出すステップとを含む方法。
【請求項47】
請求項46に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項48】
請求項46に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項49】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置装置を使用して、前記それぞれのモールドに移動し、前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項50】
請求項49に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項51】
請求項49に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項52】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを穴あき入力バスケット内に装填するステップと、
電動キャリア上のグリップフィンガを使用して、前記入力バスケットから前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記グリップフィンガを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置/充填装置を前記それぞれのモールドに隣接して移動させるステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記載置/充填装置により前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記載置/充填装置から、前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に含まれる状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項53】
請求項52に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項54】
請求項52に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【特許請求の範囲】
【請求項1】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数の冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項2】
請求項1に記載の自動機械において、
前記冷却ユニットがそれぞれ、少なくとも1つのTECを含む自動機械。
【請求項3】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記包埋組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項4】
請求項3に記載の自動機械において、
前記載置装置および前記分注器が、前記複数の冷却ユニット間を一緒に移動可能である自動機械。
【請求項5】
請求項1に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項6】
請求項2に記載の自動機械において、
各TECに熱的に結合されたそれぞれのモールドをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項7】
請求項1に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項8】
請求項7に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項9】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項10】
請求項1に記載の自動機械において、
該機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項11】
請求項1に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項12】
請求項1に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項13】
請求項1に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項14】
請求項13に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項15】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された穴あき入力部材を備え、前記穴あき入力部材がさらに、組織処理機に受けられるように構築され、前記組織処理機内での前記組織の固定および処理に用いる手順による劣化に耐えることができ、該自動機械がさらに、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項16】
請求項15に記載の自動機械において、
前記冷却ユニットがTECを含む自動機械。
【請求項17】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項18】
請求項17に記載の自動機械において、
前記載置装置が前記分注器を含む自動機械。
【請求項19】
請求項15に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項20】
請求項15に記載の自動機械において、
前記冷却ユニットが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成されたモールドを含む自動機械。
【請求項21】
請求項15に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項22】
請求項21に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項23】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項24】
請求項15に記載の自動機械において、
前記機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
前記冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項25】
請求項15に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器を備える自動機械。
【請求項26】
請求項15に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項27】
請求項15に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項28】
請求項27に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項29】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、ミクロトームにより切片化可能な各支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数のTECユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つのミクロトームにより切片化可能な支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記冷却ユニット間で移動するように取り付けられた載置装置であって、前記第1位置から前記第2位置に前記支持体を移動させるように動作する設定ヘッドと、前記包埋操作中に、前記ミクロトームにより切片化可能な支持体、および前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを含む載置装置とを備える自動機械。
【請求項30】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項31】
請求項29に記載の自動機械において、
前記TECユニットがそれぞれ、熱電式制御部によって動作される冷却プレートを伴う支持部材と、前記冷却プレートに結合されたモールドとをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項32】
請求項29に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な支持体のスタックを垂直に保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項33】
請求項32に記載の自動機械において、
前記細長いバスケットが、その下端に分配用の開口を含み、
前記下端に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された移動可能な部材をさらに備える自動機械。
【請求項34】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項35】
請求項29に記載の自動機械において、
前記機械内で、少なくとも2つの異なるサイズの、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各TECユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な1つの構成の支持体を受けるように構成され、前記第2モールドが、ミクロトームにより切片化可能な異なる構成の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な支持体の前記構成を検出するように動作するセンサを備え、前記キャリアアセンブリが、前記センサによって検出された前記構成に応答して、前記ミクロトームにより切片化可能な支持体の1つを、前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項36】
請求項29に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項37】
請求項29に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項38】
請求項29に記載の自動機械において、
前記TECユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を準備した後で、前記出力部材から取り出すことができる自動機械。
【請求項39】
請求項38に記載の自動機械において、
前記入力および出力部材がそれぞれ、前記キャビネット構造のヒンジ式の扉を備える自動機械。
【請求項40】
ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項41】
請求項40に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項42】
請求項40に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項43】
フレーム部材内に収容された、ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記組織標本が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各支持体およびその上に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能な支持体を載置するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項44】
請求項43に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項45】
請求項43に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項46】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を取り出すステップとを含む方法。
【請求項47】
請求項46に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項48】
請求項46に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項49】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置装置を使用して、前記それぞれのモールドに移動し、前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項50】
請求項49に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項51】
請求項49に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項52】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを穴あき入力バスケット内に装填するステップと、
電動キャリア上のグリップフィンガを使用して、前記入力バスケットから前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記グリップフィンガを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置/充填装置を前記それぞれのモールドに隣接して移動させるステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記載置/充填装置により前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記載置/充填装置から、前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に含まれる状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項53】
請求項52に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項54】
請求項52に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項55】
組織標本を保持するためのカセットであって、
底壁と、前記組織標本を受け取るための内部空間を規定するように前記底壁に対して上向きに延びる少なくとも1つの側壁とを含む本体と;
前記本体に関連する感知要素であって自動感知システムが該カセットの少なくとも1つの特徴を判定できるように構成された感知要素と;を備えるカセット。
【請求項56】
請求項55に記載のカセットにおいて、
前記感知要素が1つまたは複数の穴をさらに備えるカセット。
【請求項57】
請求項55に記載のカセットにおいて、
前記感知要素が機械により読取り可能であるカセット。
【請求項58】
請求項55に記載のカセットにおいて、
前記感知要素が機械により読取り可能な印を備えるカセット。
【請求項1】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数の冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項2】
請求項1に記載の自動機械において、
前記冷却ユニットがそれぞれ、少なくとも1つのTECを含む自動機械。
【請求項3】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記包埋組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項4】
請求項3に記載の自動機械において、
前記載置装置および前記分注器が、前記複数の冷却ユニット間を一緒に移動可能である自動機械。
【請求項5】
請求項1に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項6】
請求項2に記載の自動機械において、
各TECに熱的に結合されたそれぞれのモールドをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項7】
請求項1に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項8】
請求項7に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項9】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項10】
請求項1に記載の自動機械において、
該機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項11】
請求項1に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項12】
請求項1に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項13】
請求項1に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項14】
請求項13に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項15】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された穴あき入力部材を備え、前記穴あき入力部材がさらに、組織処理機に受けられるように構築され、前記組織処理機内での前記組織の固定および処理に用いる手順による劣化に耐えることができ、該自動機械がさらに、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項16】
請求項15に記載の自動機械において、
前記冷却ユニットがTECを含む自動機械。
【請求項17】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項18】
請求項17に記載の自動機械において、
前記載置装置が前記分注器を含む自動機械。
【請求項19】
請求項15に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項20】
請求項15に記載の自動機械において、
前記冷却ユニットが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成されたモールドを含む自動機械。
【請求項21】
請求項15に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項22】
請求項21に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項23】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項24】
請求項15に記載の自動機械において、
前記機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
前記冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項25】
請求項15に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器を備える自動機械。
【請求項26】
請求項15に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項27】
請求項15に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項28】
請求項27に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項29】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、ミクロトームにより切片化可能な各支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数のTECユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つのミクロトームにより切片化可能な支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記冷却ユニット間で移動するように取り付けられた載置装置であって、前記第1位置から前記第2位置に前記支持体を移動させるように動作する設定ヘッドと、前記包埋操作中に、前記ミクロトームにより切片化可能な支持体、および前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを含む載置装置とを備える自動機械。
【請求項30】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項31】
請求項29に記載の自動機械において、
前記TECユニットがそれぞれ、熱電式制御部によって動作される冷却プレートを伴う支持部材と、前記冷却プレートに結合されたモールドとをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項32】
請求項29に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な支持体のスタックを垂直に保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項33】
請求項32に記載の自動機械において、
前記細長いバスケットが、その下端に分配用の開口を含み、
前記下端に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された移動可能な部材をさらに備える自動機械。
【請求項34】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項35】
請求項29に記載の自動機械において、
前記機械内で、少なくとも2つの異なるサイズの、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各TECユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な1つの構成の支持体を受けるように構成され、前記第2モールドが、ミクロトームにより切片化可能な異なる構成の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な支持体の前記構成を検出するように動作するセンサを備え、前記キャリアアセンブリが、前記センサによって検出された前記構成に応答して、前記ミクロトームにより切片化可能な支持体の1つを、前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項36】
請求項29に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項37】
請求項29に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項38】
請求項29に記載の自動機械において、
前記TECユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を準備した後で、前記出力部材から取り出すことができる自動機械。
【請求項39】
請求項38に記載の自動機械において、
前記入力および出力部材がそれぞれ、前記キャビネット構造のヒンジ式の扉を備える自動機械。
【請求項40】
ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項41】
請求項40に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項42】
請求項40に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項43】
フレーム部材内に収容された、ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記組織標本が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各支持体およびその上に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能な支持体を載置するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項44】
請求項43に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項45】
請求項43に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項46】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を取り出すステップとを含む方法。
【請求項47】
請求項46に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項48】
請求項46に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項49】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置装置を使用して、前記それぞれのモールドに移動し、前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項50】
請求項49に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項51】
請求項49に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項52】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを穴あき入力バスケット内に装填するステップと、
電動キャリア上のグリップフィンガを使用して、前記入力バスケットから前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記グリップフィンガを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置/充填装置を前記それぞれのモールドに隣接して移動させるステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記載置/充填装置により前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記載置/充填装置から、前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に含まれる状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項53】
請求項52に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項54】
請求項52に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【特許請求の範囲】
【請求項1】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数の冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項2】
請求項1に記載の自動機械において、
前記冷却ユニットがそれぞれ、少なくとも1つのTECを含む自動機械。
【請求項3】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記包埋組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項4】
請求項3に記載の自動機械において、
前記載置装置および前記分注器が、前記複数の冷却ユニット間を一緒に移動可能である自動機械。
【請求項5】
請求項1に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項6】
請求項2に記載の自動機械において、
各TECに熱的に結合されたそれぞれのモールドをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項7】
請求項1に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項8】
請求項7に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項9】
請求項1に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項10】
請求項1に記載の自動機械において、
該機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項11】
請求項1に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項12】
請求項1に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項13】
請求項1に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項14】
請求項13に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項15】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された穴あき入力部材を備え、前記穴あき入力部材がさらに、組織処理機に受けられるように構築され、前記組織処理機内での前記組織の固定および処理に用いる手順による劣化に耐えることができ、該自動機械がさらに、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された冷却ユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つの支持体を、前記入力部材から前記冷却ユニットに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記包埋操作中に、前記ミクロトームにより切片化可能な支持体と、前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを備える自動機械。
【請求項16】
請求項15に記載の自動機械において、
前記冷却ユニットがTECを含む自動機械。
【請求項17】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
前記第1位置から前記第2位置に前記支持体を移動させるように動作する載置装置を備える自動機械。
【請求項18】
請求項17に記載の自動機械において、
前記載置装置が前記分注器を含む自動機械。
【請求項19】
請求項15に記載の自動機械において、
前記分注器によって前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項20】
請求項15に記載の自動機械において、
前記冷却ユニットが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成されたモールドを含む自動機械。
【請求項21】
請求項15に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な複数の支持体を保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項22】
請求項21に記載の自動機械において、
前記細長いバスケットが分配用の開口を含み、該機械がさらに、
前記分配用の開口に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された位置決め装置を備える自動機械。
【請求項23】
請求項15に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項24】
請求項15に記載の自動機械において、
前記機械内で、少なくとも2つの異なる構成の、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
前記冷却ユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な第1の支持体を受けるように構成され、前記第2モールドが、前記ミクロトームにより切片化可能な第1の支持体と異なる構成を有するミクロトームにより切片化可能な第2の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な第1および第2の支持体の前記それぞれの構成を検出するように動作するセンサを備え、
前記キャリアアセンブリが、前記センサによって検出された前記ミクロトームにより切片化可能な支持体の前記構成に応じて、前記ミクロトームにより切片化可能な支持体の1つを前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項25】
請求項15に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器を備える自動機械。
【請求項26】
請求項15に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項27】
請求項15に記載の自動機械において、
前記冷却ユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を包埋した後で、前記出力部材から取り出すことができる自動機械。
【請求項28】
請求項27に記載の自動機械において、
前記入力部材がヒンジ式の扉を備える自動機械。
【請求項29】
ミクロトームにより切片化可能なそれぞれの支持体上で組織標本を包埋する自動機械であって、ミクロトームにより切片化可能な各支持体が、フレーム内で受けられ、前記フレーム内の第1位置と、ミクロトーム内で切片化するために前記組織標本を露出させる第2位置の間で移動可能であり、該自動機械がさらに、
組織包埋操作の前に、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された入力部材と、
前記組織包埋操作の後で、前記ミクロトームにより切片化可能な複数の支持体を保持するように構成された出力部材と、
前記組織包埋操作中に、それぞれ前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持するように構成された複数のTECユニットと、
移動用に取り付けられた電動キャリアアセンブリであって、前記ミクロトームにより切片化可能な支持体の少なくとも1つを保持し、前記1つのミクロトームにより切片化可能な支持体を、前記入力部材から前記冷却ユニットの1つに、さらに前記出力部材に移動させるように構成された電動キャリアアセンブリと、
前記冷却ユニット間で移動するように取り付けられた載置装置であって、前記第1位置から前記第2位置に前記支持体を移動させるように動作する設定ヘッドと、前記包埋操作中に、前記ミクロトームにより切片化可能な支持体、および前記ミクロトームにより切片化可能な各支持体によって担持された少なくとも1つの組織標本の上にそれぞれ包埋材料を分注するように動作する分注器とを含む載置装置とを備える自動機械。
【請求項30】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体上に分注された前記包埋材料の量を検出するように動作するセンサをさらに備える自動機械。
【請求項31】
請求項29に記載の自動機械において、
前記TECユニットがそれぞれ、熱電式制御部によって動作される冷却プレートを伴う支持部材と、前記冷却プレートに結合されたモールドとをさらに備え、前記モールドが、前記ミクロトームにより切片化可能な支持体と、前記分注器によって分注された前記包埋材料とを保持するように構成される自動機械。
【請求項32】
請求項29に記載の自動機械において、
前記入力部材が、前記ミクロトームにより切片化可能な支持体のスタックを垂直に保持し、分配するように構成された細長いバスケットを含む自動機械。
【請求項33】
請求項32に記載の自動機械において、
前記細長いバスケットが、その下端に分配用の開口を含み、
前記下端に向かって、前記ミクロトームにより切片化可能な支持体を付勢するように構成された移動可能な部材をさらに備える自動機械。
【請求項34】
請求項29に記載の自動機械において、
前記ミクロトームにより切片化可能な支持体を加熱するために、前記入力部材に熱的に結合されたヒータをさらに備える自動機械。
【請求項35】
請求項29に記載の自動機械において、
前記機械内で、少なくとも2つの異なるサイズの、ミクロトームにより切片化可能な支持体をハンドリングし包埋することができ、該機械がさらに、
各TECユニットと熱的に結合された第1モールドおよび第2モールドを備え、前記第1モールドが、ミクロトームにより切片化可能な1つの構成の支持体を受けるように構成され、前記第2モールドが、ミクロトームにより切片化可能な異なる構成の支持体を受けるように構成され、該機械がさらに、
前記ミクロトームにより切片化可能な支持体の前記構成を検出するように動作するセンサを備え、前記キャリアアセンブリが、前記センサによって検出された前記構成に応答して、前記ミクロトームにより切片化可能な支持体の1つを、前記第1モールドまたは前記第2モールドのいずれかに移す自動機械。
【請求項36】
請求項29に記載の自動機械において、
前記包埋材料がパラフィンを含み、該機械がさらに、
前記分注器に流体連通するように結合され、かつ液体の形態の前記パラフィンを保持し加熱するように構成された貯留器をさらに備える自動機械。
【請求項37】
請求項29に記載の自動機械において、
前記キャリアが、前記ミクロトームにより切片化可能な支持体の1つの両側を掴むように構成された1対のフィンガをさらに備える自動機械。
【請求項38】
請求項29に記載の自動機械において、
前記TECユニット、前記電動キャリアアセンブリ、および前記分注器を収容する内部を有するキャビネット構造をさらに備え、
前記入力部材および前記出力部材を、前記キャビネット構造の外側から開くことができ、それによって前記ミクロトームにより切片化可能な支持体を、前記入力部材内に装填することができ、前記組織標本を準備した後で、前記出力部材から取り出すことができる自動機械。
【請求項39】
請求項38に記載の自動機械において、
前記入力および出力部材がそれぞれ、前記キャビネット構造のヒンジ式の扉を備える自動機械。
【請求項40】
ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項41】
請求項40に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項42】
請求項40に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項43】
フレーム部材内に収容された、ミクロトームにより切片化可能な支持体上で組織標本を包埋する自動化された方法であって、
それぞれ組織標本を上に有する、前記ミクロトームにより切片化可能な複数の支持体を入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能な支持体を連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップと、
前記組織標本が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各支持体およびその上に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能な支持体を載置するステップと、
前記それぞれのモールド内に液体包埋材料を導入するステップと、
各モールド内で前記液体包埋材料を、前記組織標本および関連するミクロトームにより切片化可能な支持体が前記各モールド内に少なくとも部分的に収容された状態で硬化させるステップと、
前記モールドから、前記ミクロトームにより切片化可能な支持体および包埋された組織標本を取り出すステップとを含む方法。
【請求項44】
請求項43に記載の方法において、
前記ミクロトームにより切片化可能な支持体が、ミクロトームにより切片化可能な、異なる構成を有する第1および第2の支持体をさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2の支持体に対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2の支持体の少なくともいずれかとして、前記ミクロトームにより切片化可能な支持体の前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能な支持体を装填するステップとを含む方法。
【請求項45】
請求項43に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能な支持体を加熱するステップをさらに含む方法。
【請求項46】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を取り出すステップとを含む方法。
【請求項47】
請求項46に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項48】
請求項46に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項49】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを入力装置内に装填するステップと、
電動キャリアを使用して、前記入力装置から前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記キャリアを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置装置を使用して、前記それぞれのモールドに移動し、前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に収容された状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項50】
請求項49に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項51】
請求項49に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項52】
フレーム部材内に収容された、ミクロトームにより切片化可能なカセット上で組織標本を包埋する自動化された方法であって、
それぞれ中に収容された組織標本を有する、前記ミクロトームにより切片化可能な複数のカセットを穴あき入力バスケット内に装填するステップと、
電動キャリア上のグリップフィンガを使用して、前記入力バスケットから前記ミクロトームにより切片化可能なカセットを連続して取り出すステップと、
前記グリップフィンガを使用して、複数のそれぞれのモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップと、
電動化した載置/充填装置を前記それぞれのモールドに隣接して移動させるステップと、
前記組織標本および前記カセットの一部が少なくとも部分的に前記フレームの外側に露出されるように、ミクロトームにより切片化可能な各カセットおよびその中に収容された前記組織標本を前記フレームを貫通して移動させることによって、前記載置/充填装置により前記それぞれのモールド内に前記ミクロトームにより切片化可能なカセットを載置するステップと、
前記載置/充填装置から、前記それぞれのモールド内に液体パラフィンを導入するステップと、
各モールド内で前記液体パラフィンを、前記組織標本および関連するミクロトームにより切片化可能なカセットが前記各モールド内に少なくとも部分的に含まれる状態で冷却するステップと、
前記モールドから、前記ミクロトームにより切片化可能なカセットおよび包埋された組織標本を、前記ミクロトームにより切片化可能な複数のカセットおよび包埋された組織標本を保持するように構成された出力装置内に取り出すステップとを含む方法。
【請求項53】
請求項52に記載の方法において、
前記ミクロトームにより切片化可能なカセットが、ミクロトームにより切片化可能な、異なる構成を有する第1および第2のカセットをさらに含み、前記モールドが、前記ミクロトームにより切片化可能な第1および第2のカセットに対応する構成を有する第1および第2のモールドをさらに含み、該方法がさらに、
前記ミクロトームにより切片化可能な第1または第2のカセットの少なくともいずれかとして、前記ミクロトームにより切片化可能なカセットの前記構成を検出するステップと、
前記検出された構成に応じて、前記第1または第2のモールド内に前記ミクロトームにより切片化可能なカセットを装填するステップとを含む方法。
【請求項54】
請求項52に記載の方法において、
前記液体包埋材料を硬化させる前に、まず、前記モールド内で前記ミクロトームにより切片化可能なカセットを加熱するステップをさらに含む方法。
【請求項55】
組織標本を保持するためのカセットであって、
底壁と、前記組織標本を受け取るための内部空間を規定するように前記底壁に対して上向きに延びる少なくとも1つの側壁とを含む本体と;
前記本体に関連する感知要素であって自動感知システムが該カセットの少なくとも1つの特徴を判定できるように構成された感知要素と;を備えるカセット。
【請求項56】
請求項55に記載のカセットにおいて、
前記感知要素が1つまたは複数の穴をさらに備えるカセット。
【請求項57】
請求項55に記載のカセットにおいて、
前記感知要素が機械により読取り可能であるカセット。
【請求項58】
請求項55に記載のカセットにおいて、
前記感知要素が機械により読取り可能な印を備えるカセット。
【図1】


【図2】
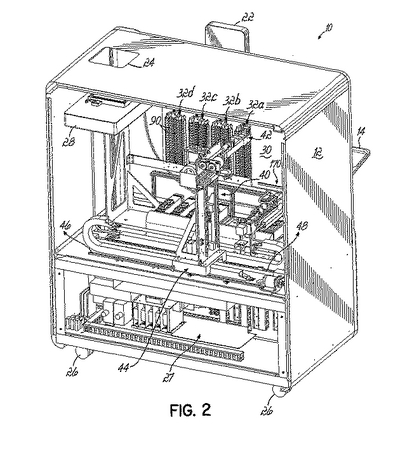
【図3】
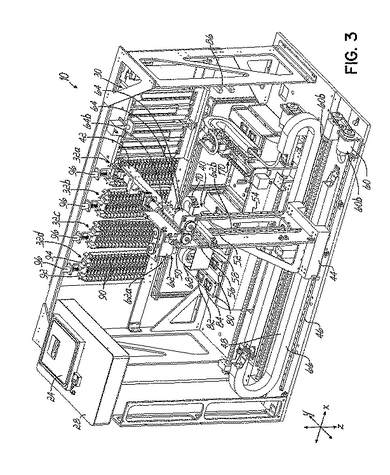
【図4】

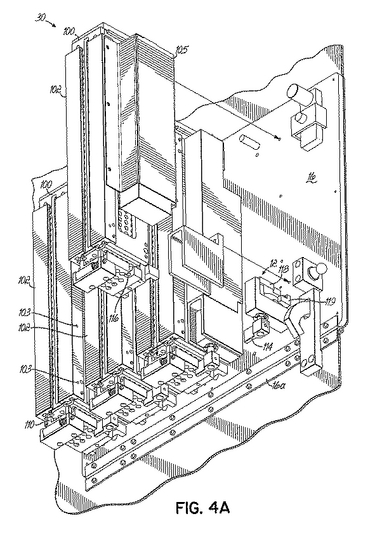

【図5】

【図6】
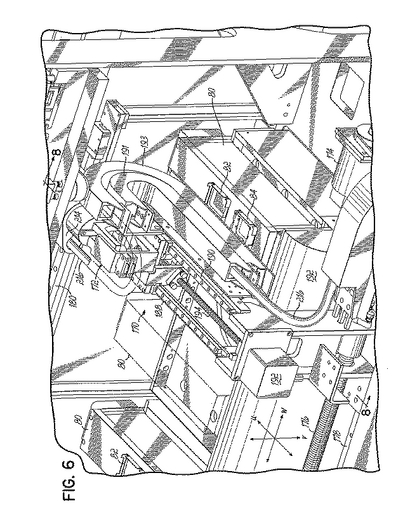
【図7】

【図8】
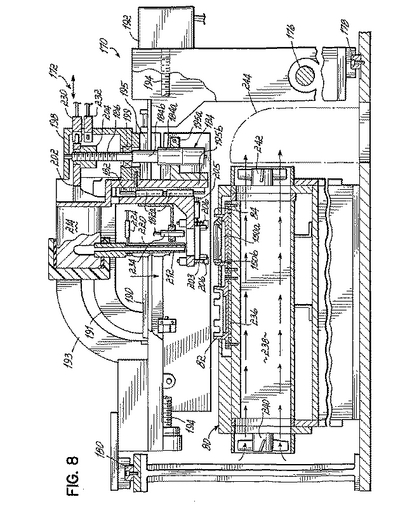
【図9】
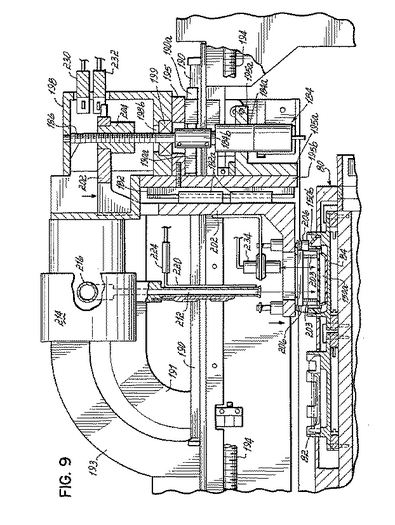
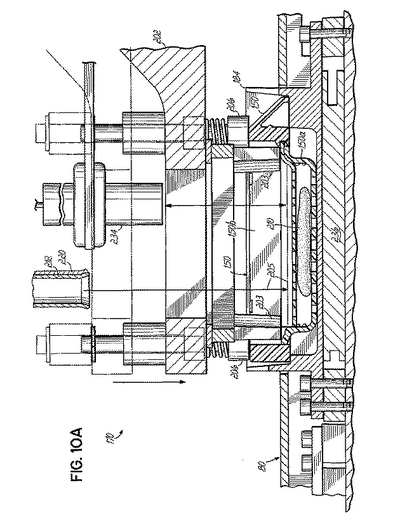


【図12】

【図13】
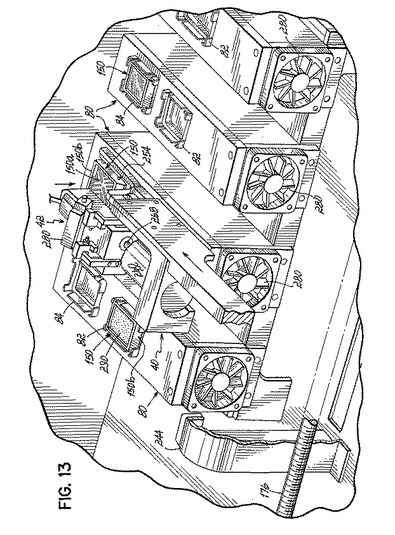
【図14】

【図15】
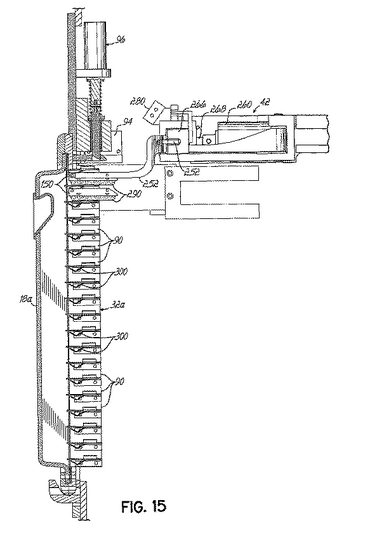
【図16】
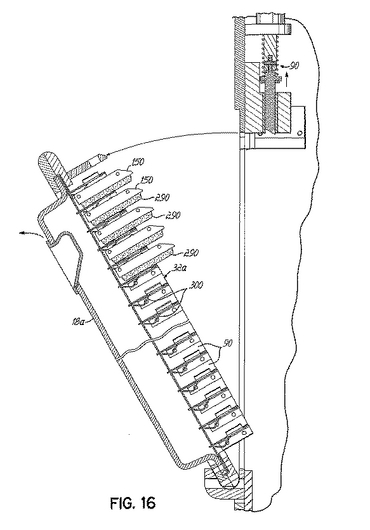
【図17】
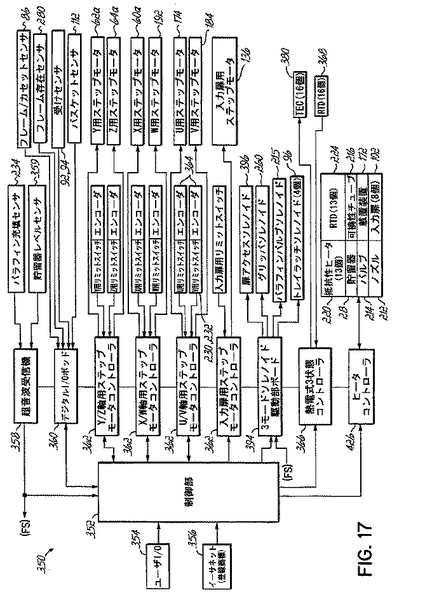
【図18】
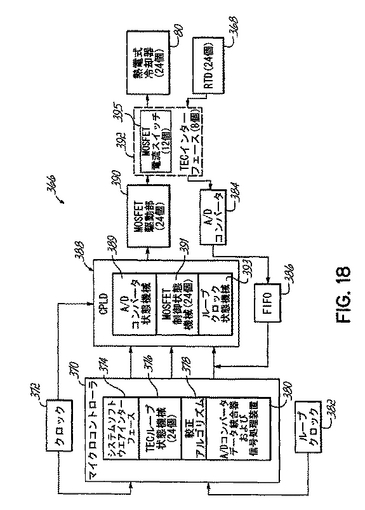
【図19】

【図20】
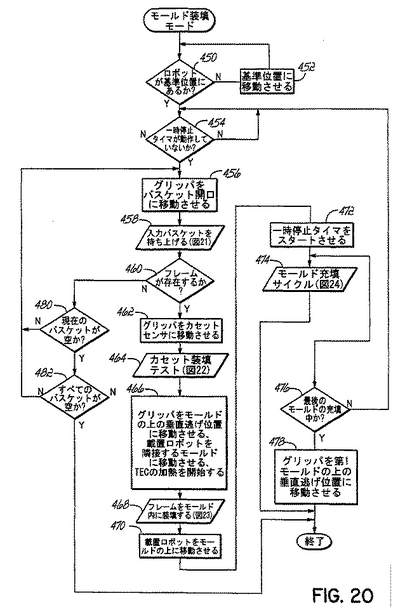
【図21】

【図22】

【図23】
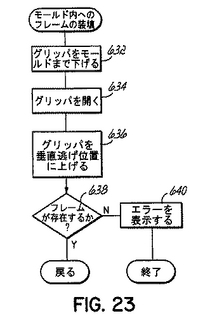
【図24】

【図25】

【図26】
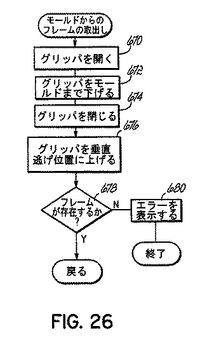
【図27】

【図28】
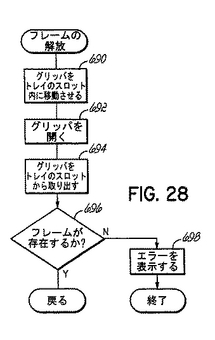
【図29】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公表番号】特表2006−500585(P2006−500585A)
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−539747(P2004−539747)
【出願日】平成14年9月26日(2002.9.26)
【国際出願番号】PCT/US2002/030779
【国際公開番号】WO2004/029584
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(505077404)バイオパス・オートメーション・エル・エル・シー (8)
【Fターム(参考)】
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成14年9月26日(2002.9.26)
【国際出願番号】PCT/US2002/030779
【国際公開番号】WO2004/029584
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(505077404)バイオパス・オートメーション・エル・エル・シー (8)
【Fターム(参考)】
[ Back to top ]