
脊柱の2つの椎体間の固定のための椎間インプラントおよび対応する位置決め機器
【課題】改良された、腰椎柱セグメントの経椎間孔椎間固定術用のインプラントを提供する。
【解決手段】脊柱の2つの椎体間の固定のため椎間インプラント1であって、2つの相対する表面3を有し、骨が成長する間、充填するための孔5または空洞6を含む本体と、位置決め機器の把持端部を受け入れるための係合部7であって、前記本体の開口部8を通して接近可能なスプライン状シャフト9として成形される係合部7とを備える椎間インプラント1に関する。有利には、さらに前述の脊椎インプラント1を移植するための位置決め機器に関する。
【解決手段】脊柱の2つの椎体間の固定のため椎間インプラント1であって、2つの相対する表面3を有し、骨が成長する間、充填するための孔5または空洞6を含む本体と、位置決め機器の把持端部を受け入れるための係合部7であって、前記本体の開口部8を通して接近可能なスプライン状シャフト9として成形される係合部7とを備える椎間インプラント1に関する。有利には、さらに前述の脊椎インプラント1を移植するための位置決め機器に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、脊柱の2つの椎体間の固定を可能にする椎間インプラント(intervertebral implant)に関する。
【0002】
より具体的には、本発明は、腰椎柱セグメントの経椎間孔椎体間固定術(TLIF)(Transforaminal Interbody Fusion)用のインプラントに関し、以下の記述では、単にその開示を簡単にするために、この特定の技術分野に焦点をあてる。
【背景技術】
【0003】
この特定の技術分野ではよく知られているように、脊椎手術に最小侵襲性外科術を用いるために様々な試みが行われてきた。
【0004】
この点に関して、いわゆるPLIF(後側方椎体間固定術(Posterior Lateral Interbody Fusion))と呼ばれる手術技術が開発されてきた。そうした手術技術によれば、椎間円板が後部の進入路を通して除かれ、椎間の空間が自己由来の骨で満たされる。
【0005】
このPLIF技術のさらなる発展が、椎間孔経由の進入に基づく、いわゆるTLIF手術技術の利用につながった。この技術によって、自己由来の骨で満たされたチタン製カップ(いわゆる、ケージ)を背側の椎間孔経由で導入することが可能になる。同時に、背側における機器使用および安定化がもたらされる。
【0006】
簡単に述べた方法の利点は、さらに腹腔経由の進入または後腹膜進入を用いる必要がないことである。
【0007】
周知の従来技術の手法が、インプラントおよび導入システムを含む、隣接する頸椎間での脊椎固定を実施するためのシステムに関する特許文献1に記載されている。
【0008】
導入システムは、フォーク状部材および通常の管状係止部材(lock member)を備える。機器の端部のねじ機構が、回転移動を直線移動に変換する。直線移動によって、フォーク状部材の変形、したがって、機器とインプラントの係合が生じる。インプラントと機器の係止はねじ部材によって行われるが、ねじ部材は、簡単なねじ山に比べて作業ステップを簡易化するものではない。
【0009】
90°の係止の場合、必要な操作ステップは少なくなるが、機器によって、インプラントの機器に対する角度調整が可能になるわけではない。
【0010】
他の従来技術の解決策が、円板の空間に椎体スペーサを届けるための方法を記載する特許文献2に開示されている。機器は2つのフィンガを有し、フィンガは相互に移動可能であり、シャフトを動かしてフィンガを作動させるとスペーサを把持するように適合されている。ハンドル部はグリップを備え、そのグリップに向かう引き金(trigger)がフィンガを互いに向かって移動させる。インプラントを、その場(in−situ)で角度調整することはできない。固定は直線移動によって行われる。 他の手法が、脊椎円板の空間内で隣接する椎骨間に脊椎インプラントを位置決めするためのインプラント、機器および方法に関連する特許文献3に記載されている。そのインプラントは、ヒンジ式の鉗子(forceps)先端によって固定される。鉗子先端は、インプラントに対して角度調整することが可能であり、機器は永久的にインプラントに接続される。この解決策は、90°の係止/係止解除機構の代わりに、複雑な機器係止機構を有するが、機器をその場(in−situ)で係合することはできない。
【0011】
他の解決策が、一端に把持デバイスを有するインプラント挿入デバイスに関連する特許文献4に開示されている。顎部が、把持要素間でインプラントを把握する把持位置と、インプラントを解放する解放位置との間を移動することができる。顎部を一斉に把持位置の方に押し進めるために、顎部の上に中空スリーブが摺動可能に配設される。インプラントの固定はスリーブの直線移動によって行われるが、この直線移動は組織に損傷を与える恐れがあり、また90°の係止ほど簡単ではない。
【0012】
他の解決策が、特許文献5に記載されている。その発明は、椎間インプラントに関するものである。機器が、ヒンジ要素によってインプラントに接続される。機器の軸方向のスリーブの回転によって、シャフトの軸方向の移動が生じる。この移動がスペーサを旋回させる。機器をその場(in−situ)で係合することはできない。角度測定は、主に一方向においてのみ可能である。係合/係合解除機構は複雑であるため、90°の係止機構に比べて劣っている。
【0013】
他の従来技術は、腰椎柱セグメントの経椎間孔椎体間固定術用のインプラントに関する発明に関連する特許文献6である。機器への取り付け部は、スロットとして構成される。このスロットの中に、機器を係合することができる。機器は、インプラントに対して様々な角度で固定することができる。インターフェースは、ポジティブ・ロック(positive lock)と比べると安定性に劣る摩擦ロック(friction lock)である。固定はねじ機構によって行われる。係合/係合解除機構は、複数の作業ステップが必要になるため、90°の係止機構に比べて劣っている。
【0014】
他の従来技術が、腰椎柱セグメントの経椎間孔椎体間固定術用のインプラントに関する特許文献7に開示されている。機器への取り付け部は、回転ジョイントとして構成される。回転ジョイントの中に、機器に対するインターフェースとしてねじ山が存在する。機器は、インプラントに対して様々な角度で固定することができる。インターフェースは、ポジティブ・ロックと比べると安定性に劣る摩擦ロックである。さらに、ねじ山によってその場(in−situ)で係合することはできない。インプラントの機器に対する固定は、90°の係止機器に比べるとより困難である。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第6,923,814号明細書
【特許文献2】米国特許第6,159,215号明細書
【特許文献3】米国特許出願公開第2006/0235426号明細書
【特許文献4】米国特許第066174号明細書
【特許文献5】米国特許出願公開第2004/0153065号明細書
【特許文献6】米国特許出願公開第2005/0096745号明細書
【特許文献7】欧州特許第1841385号明細書
【発明の概要】
【発明が解決しようとする課題】
【0016】
上記内容に基づき、本発明の目的は、改良された、腰椎柱セグメントの経椎間孔椎間固定術用のインプラントを提供することである。
【0017】
そうしたインプラントは、高い一次安定性を有しまた使用時には簡単な手術手順を可能にするものでなければならない。
【0018】
さらにインプラントは、きわめて単純な構造を有し、低コストで経済的なものであることを要する。
【課題を解決するための手段】
【0019】
本発明の解決策の概念は、位置決め機器の把持端部を受け入れるための係合部を有する、脊柱の2つの椎体間の固定のための改良されたインプラントを提供し、係合部の特定の形状によって、そうした把持端部のきわめて強く、かつ安定した把持を可能にすることである。
【0020】
この解決策の概念によれば、前述の技術的な問題は、脊柱の2つの椎体間の固定のための椎間インプラントであって、
−2つの相対する表面を有し、骨が成長する間、充填するための孔または空洞を含む本体と、
−位置決め機器の把持端部を受け入れるための係合部であって、前記本体の開口部を通して接近可能なスプライン状シャフトとして成形された係合部と
を備える椎間インプラントによって解決される。
【0021】
インプラント本体およびスプライン状シャフトは、例えば射出成形によって、生体適合性かつ放射線透過性の合成材料で一体構造として製造される。代替方法として、前記スプライン状シャフトは、生体適合性の金属または金属合金によって実現することができ、インプラント本体を形成する生体適合性かつ放射線透過性の合成材料の内側で合体させ、これによって、前記把持端部と係合部のより強い係合が可能になる。
【0022】
有利には、スプライン状シャフトは、前記相対する表面の間で前記本体に埋め込まれる。より詳細には、スプライン状シャフトは、軸が前記相対する表面に実質的に垂直な状態で前記本体に埋め込まれる。
【0023】
さらに、スプライン状シャフトは、ギヤのように規則的な角度間隔に配置された複数の周縁リブを有する。
【0024】
より詳細には、スプライン状シャフトは、規則的な比較的小さいピッチを有する溝(groove)と規則的に交互に配置されてシャフトのギヤ形状を形成する、複数のリブを有する。この特定の形状によって、埋め込まれた部分をインプラント本体によって強く把持することが可能になり、その結果、インプラント本体とスプライン状シャフトの間には、それらが異なる材料で製造されている場合、強い機械的な一体化および固定が得られる。
【0025】
スプライン状シャフトへの接近を可能にする開口部は、少なくとも1つの横方向の壁によって境界を定められ、前記横方向の壁は、位置決め機器の把持端部について実施可能な角度方向付けに対する横方向の抑止物になることに留意すべきである。したがって、スプライン状シャフトは、その横周縁部の約270°にわたる前記開口部を通して接近することができる。
【0026】
インプラント本体は一端に、いわゆる挿入用突出部(insertion nose)を有し、前記スプライン状シャフトは、前記挿入用突出部に対して反対側の端部から接近することができる。
【0027】
スプライン状シャフトがインプラント本体の一端の近くに存在することによって、前記インプラント本体内の、前記挿入用突出部の端部の近くにのみマーカが埋め込まれる。
【0028】
前記相対する表面は、わずかにドーム状の形状を呈する。
【0029】
本発明は、また、請求項1に記載のインプラントのための位置決め機器であって、
−近位端および遠位端を有するハンドルと、
−前記ハンドルの前記遠位端から延在する係止シャフトと、
−前記シャフトの遠位端に位置する把握ヘッドと
を備える位置決め機器であり、、
前記係止シャフトはカニューレ状であり、ハンドルを貫通するカニューレ状シャフトの内側にステムが収容され、
前記シャフトは、前記ステムの上で回転可能であり、
前記把握ヘッドは前記ステムの遠位端に形成され、1対のクランプが前記ステムの角回転に応じて開閉することを特徴とする位置決め機器に関する。
【0030】
有利には、前記カニューレ状の係止シャフトは、内部の楕円形断面を有する。
【0031】
本発明のインプラントおよび位置決め機器の他の特徴および利点は、図面を参照すれば、非限定的な例として示される以下の記述から明らかになるであろう。
【図面の簡単な説明】
【0032】
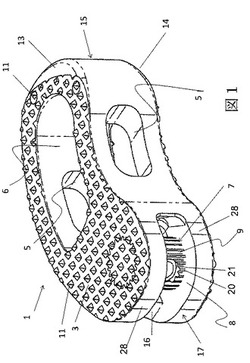
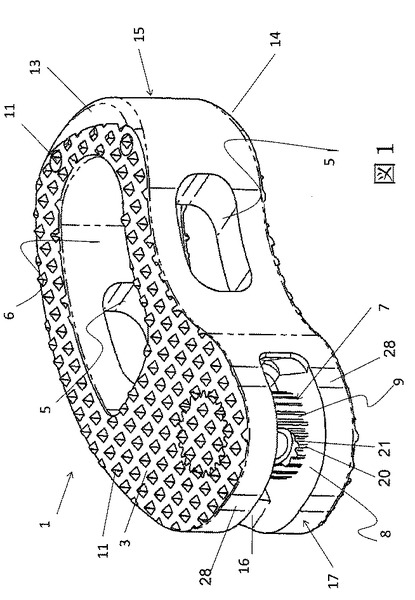
【図1】本発明による脊柱の2つの椎体間の固定のためのインプラントの斜視図である。
【図2】図1のインプラントの側面図である。
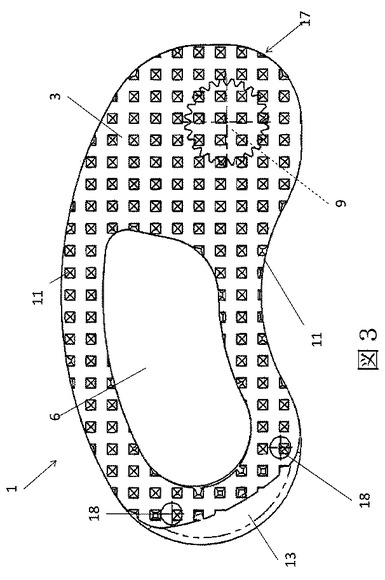
【図3】図1のインプラントの上面図である。
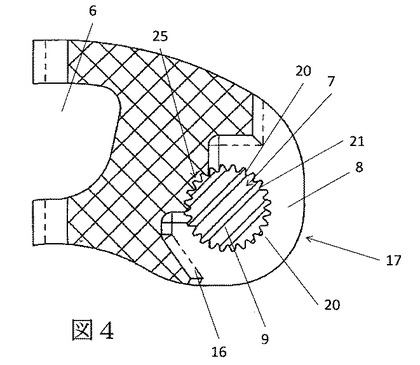
【図4】A−A線に沿って得られる図1のインプラントの側部の部分断面図である。
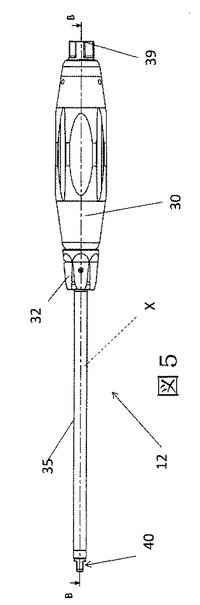
【図5】図1のインプラントを移植するために用いることができる位置決め機器の側面図である。
【図6】B−B線に沿って得られる図5の機器の断面図である。
【図7】図5の機器の斜視図である。
【図8】図5および7に示す機器の遠位部の斜視図である。
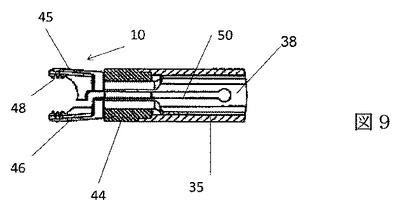
【図9】図8の遠位部の断面図である。
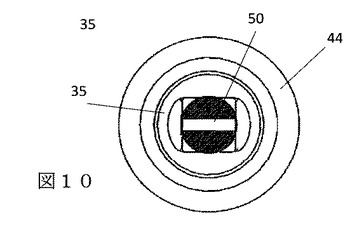
【図10】図6のF−F線に沿って得られる機器の遠位部の断面図である。
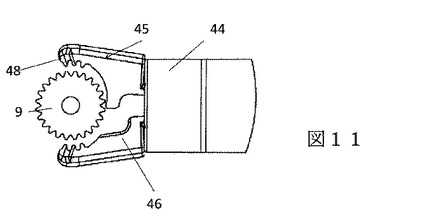
【図11】一手術状態における機器の遠位部の側面図である。
【図12】別の手術状態における機器の遠位部の側面図である。
【図13】図5および7の機器の別個の部分の斜視図である。
【図14】図13の細部の斜視図である。
【図15】本発明の機器の細部の正面図である。
【図16】本発明の機器の他の細部の斜視図である。
【図17】一手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
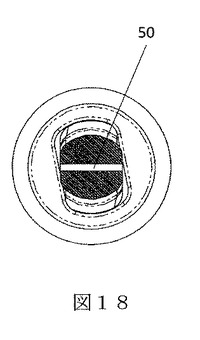
【図18】別の手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
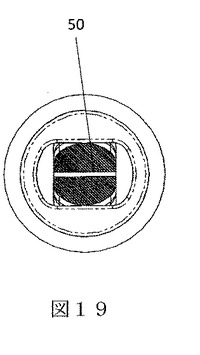
【図19】さらに別の手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
【発明を実施するための形態】
【0033】
図面を参照すると、脊柱の2つの椎体間の固定を可能にするために本発明によって実現される椎間インプラントが、包括的に1で示されている。インプラント1は、具体的には椎体間固定デバイスとして使用するためのものである。
【0034】
インプラント1は、具体的には、最新の最小侵襲性外科術の必要に応じた椎骨手術を可能にするために実現されたものである。インプラント1は主に、TLIF(経椎間孔腰椎椎間固定術(Transforaminal Lombar Intervertebral Fusion))の外科術での使用に専用のものであるが、PLIFまたはOILFなどの他の外科技術でも問題なく採用することができる。
【0035】
インプラント1は、生体適合性かつ放射線透過性の合成材料、例えば好適な弾性係数を有するポリエーテルエーテルケトン(PEEK)構造によって実現された本体2を有する。
【0036】
しかしながら、例えばチタンコーティングの有無にかかわらず、他の適切なインプラント材料を用いることもできる。
【0037】
本体2はインゲンマメ(Kidney−bead)のような形をしており、複数の異なる高さ、幅および長さで利用することができる。
【0038】
この合成材料がX線を透過するため、インプラント本体2の生体適合性の合成材料には従来からいくつかのマーカ18が組み込まれ、取り付け時に外科医がインプラントを識別することを可能にする。例えば、いわゆる後方または前方マーカピン28を本体2の構造の内側で合体させ、インプラントがはっきりと容易に見えるようにすることができる。
【0039】
こうしたX線マーカの例が、図1および3に数字18および28で示されている。しかしながら、こうしたマーカ18、28の数はさらに多くてもよく、またインプラント本体2の主軸に従って、またはそうした軸に交差するように向きを定めることができる。マーカは互いに平行にすること、または重なり合う軸が一点に集まるようにすることができる。
【0040】
本体2は、椎骨終板の解剖学的構造に適合するように、脊柱と直接接触する2つの対向する表面3および4を有する。本体2は、骨の成長(例えば自己生成の移植骨)を可能にするという目的を満たすために、孔5または空洞6を含む。例えば、孔5はAP骨の成長のために設けられ、空洞6は尾部−頭部の骨の成長のために設けられる。
【0041】
表面3および4はそれぞれ、わずかにドーム状の形をしている。
【0042】
表面3、4にはそれぞれ、インプラント1が移植されるとき、最初に安定化させ、また椎骨終板の対応する当接面(abutting surface)に対するこれらの表面3、4の把持また付着を改善するために、複数の歯11が設けられる。歯11は、表面3および4のそれぞれの上に規則的に分散させる。
【0043】
全体として図2の上面図に示すように、本体2はわずかに湾曲した形を有し、両端部は丸い縁部を有する。一方の端部15は挿入用突出部と呼ばれ、本体2の表面3および4は、自己転向(self−distracting)機能をもたらし挿入を助けるものとして働く、前記端部15に対応するテーパ部13および14を呈し、挿入を容易にする。
【0044】
有利には、本発明に従って、本体2には位置決め機器12の把持端部10を受け入れるための係合部7が設けられる。
【0045】
係合部7は、本体2の横方向の開口部8を通って接近することができる、ギヤと同様のスプライン状シャフト9である。このスプライン状シャフト9は、表面3および4の平面に実質的に垂直な軸を有する。
【0046】
図4の断面図に明確に示されるように、スプライン状シャフト9の一部25は本体2に埋め込まれているが、それに対して、大部分は開口部8を通して接近可能である。
【0047】
この接近可能なまたは露出した部分25は、180°から320°の間の開度を伴うことができる。
【0048】
この部分25は、具体的には、インプラント本体2とスプライン状シャフト9が異なる材料で実現されるときには射出成形で設けることができ、その他の場合には、その部分25は一体構造としてインプラント本体2と簡単に一体成形される。有利には、スプライン状シャフト9は、その周縁面に沿って複数のリブ20を呈する実質的に円筒形の形状を有する。そうしたリブ20は、溝21によってギヤのように規則的な角度間隔に配置され、10から80個までの様々な数で設けられる。
【0049】
より詳細には、スプライン状シャフト9は、規則的な比較的小さいピッチを有する溝21と規則的に交互に配置されてシャフトのギヤ形状を形成する、複数のリブ20を有する。この特定の形状によって、インプラント本体2が埋め込まれた部分25を強く把持することが可能になり、その結果、インプラント本体2とスプライン状シャフト9との間には、それらが異なる材料で製造されている場合、強い機械的な一体化および固定が存在するようになる。
【0050】
インプラント本体およびスプライン状シャフトが一体構造で得られる場合には、プライン状シャフト9の接近可能な部分25が、交互に配置されたリブ20および溝21からなる部分的に円筒形の突起を呈するようになることに留意すべきである。
【0051】
インプラント1は、機器12の把持端部によって、スプライン状シャフト9を介してクランプすることができるが、このクランプ動作は、以下において理解されるように、接近可能な部分25の様々な部分で実施することができる。
【0052】
スプライン状シャフト9は、機器12の捕捉ヘッド10とインプラント1との間のポジティブ・ロックをもたらす。
【0053】
開口部8は、少なくとも1つの横方向の壁16によって境界を定められ、横方向の壁16は、捕捉ヘッド10がスプライン状シャフト9と係合しているとき、機器12の捕捉ヘッド10について実施可能な角度方向付けに対する横方向の抑止物になる。
【0054】
この機械的な抑止物16は、位置決めまたは挿入用の機器12に対するインプラント1の位置のフィードバックを与える。
【0055】
スプライン状シャフト9によって、インプラント1に対する複数の予め定められた位置に機器12の捕捉ヘッド10を固定することが可能になる。
【0056】
さらに、インターフェースによって、機器とインプラントの間で最大量のトルクならびに高い軸力(axial force)を伝えることが可能になる。
【0057】
これまでに言及したように、インプラント本体2を実現する材料は、スプライン状シャフト9を実現する材料と同じものとすることができる。代替方法として、2つの材料が有利には異なってもよい。
【0058】
例えば出願人の権利を制限することなく、インプラント1の本体2をPEEKで製造し、スプライン状シャフト9を適切な生体適合性合金、例えばチタンまたはチタン合金によって製造することができる。
【0059】
そうした材料の組み合わせによって、引張りならびにねじりに関する機器/インプラントのインターフェースの強度が、実現可能な純粋なPEEKのインターフェースに比べてずっと強くなる。 さらに、金属のスプライン状シャフト9が存在することによって、好ましくは開口部8に対してインプラント1の反対側に、すなわち挿入用突出部15の近くに配置された、ただ1対のマーカ18を採用することが可能になる。これは、スプライン状シャフト9の形状により、例えば反対側に配置されたただ1対のマーカ18と組み合わせて、インプラント1の位置を簡単に識別することが可能になるためである。
【0060】
スプライン状シャフト9は、既存のインターフェースシステムと比べると、より高い剛性のインターフェース、ならびに処理に対するより高い自由度をもたらし、その場(in situ)でインプラントを回転させるのに必要なトルクの伝達を可能にする。
【0061】
従来技術には、既存のインプラントと比べて優れた処理の可能性をもたらす、PEEKの本体2およびチタンのスプライン状シャフト9を用いたハイブリッド型のインプラントは記載されていない。
【0062】
本発明のインプラントは多くの利点を有しており、例えばそれはきわめて単純で低コストの構成を有し、インプラントを、隣接する椎骨間の椎間腔の中に挿入する、または椎間腔から取り除くための機器によって、簡単にかつしっかりと処理することができる。 インプラントの構造によって、機器はその場(in−situ)での操作に、従来技術のすべての処理および係止機構よりもずっと小さい空間しか必要としないが、その空間は、外科医による切開の大きさを決めるため重大である。この機能により、インプラントを最小断面の方向に挿入し、その場(in situ)で正確な位置に回転させることができるようになるため、最小侵襲性の移植が可能になる。
【0063】
さらに機器とインプラントとの間の安定した係止によって、インプラントのその場(in−situ)での完全に制御された角度調整性が可能になる。
【0064】
次に、図5から19の例を参照して、前述のインプラント1の処理に用いられる位置決め機器12について以下に詳しく開示する。
【0065】
本発明は、脊柱内でインプラント1のような椎間インプラントを位置決めするように構成された機器12にも関する。
【0066】
機器12によって、インプラント1のようなインプラントを、機器の捕捉ヘッドおよび迅速な90°の楕円形の係止機構によって簡単に把握することが可能になる。
【0067】
接続は、インプラント1内のスプライン状シャフト9のリブおよび溝、ならびに機器に対するある予め決められた位置における固定、または複数の予め決められた位置における固定を可能にする捕捉ヘッド10を形成する、クランプ45、46の対応する歯によって可能になる。
【0068】
従来技術には異なる捕捉機構が記載されているが、そうした機器はすべて、インプラントを機器に固定するための複数回の回転、もしくは機器に対するかなりの直線移動、または複雑なヒンジ機構を必要とする。
【0069】
以下において理解されるように、機器のサムホイールの単純な90°の回転によって、インプラント1または同様のインプラント構造体の係合および係合解除を著しく簡易にする係止機構がもたらされる。
【0070】
さらに、かなりの軸方向の変位を伴う周知の機器は、組織の損傷を引き起こす恐れがある。プライヤ(pliers)状の機器は通常、過大な空間を必要とするが、その空間は、機器がより大きい切開を必要とするため、そうした用途において重大であり、通常は、プライヤ状の機器を最小侵襲性外科術に使用することができない。
【0071】
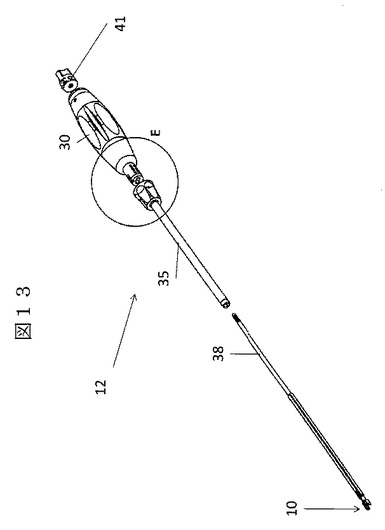
TLIFインプラント用の位置決め機器12は、様々な構成要素を備える。
【0072】
ハンドル30は、機器12をしっかり保持することを可能にする。ハンドルの内側には、細長いスリーブ31が収容されている。このスリーブ31の遠位端33は、ハンドル30の同じ軸と整列させたX軸に沿って延在する係止シャフト35に接続されている。
【0073】
係止シャフト35は、捕捉ヘッド10を含む遠位端部で終了する。
【0074】
係止シャフト35の遠位端にはつば(collar)部44が取り付けられ、捕捉ヘッド10は前記鍔部44の外側に延在する。
【0075】
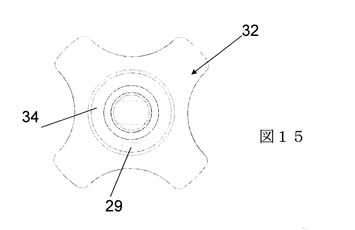
係止シャフト35はハンドル30より長く、シャフト35とスリーブ31の遠位端との間の接続は、サムホイール32によって保護される。サムホイール32とスリーブ31の遠位端33との間の接続は、様々な方法で得ることができるが、この実施形態では、図14に示すように差し込み結合34が好ましい。
【0076】
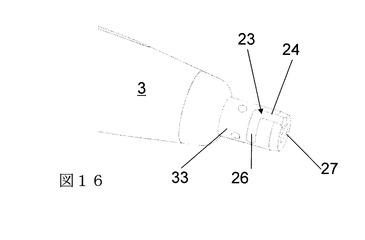
さらに詳細には、図15および16に示すように、スリーブ31の遠位端33には、L字形を有する溝23が設けられている。この溝の第1の部分24は、シャフト35の軸X−Xに平行に延び、この溝23の第2の部分26は、第1の溝部分24に垂直に、用途の必要性に応じて10°から130°まで変化することができる所定の角度範囲にわたって延びる。
【0077】
サムホイール32の空洞34の内側に、ピン29を突出させる。
【0078】
このピン29は、サムホイール32がスリーブ31の遠位端33に取り付けられるとき、第1の溝部分24に挿入される。次いで、ピン29は、L字形の溝23の第2の溝部分26に捉えられ、第2の溝部分26の角度偏位(angular excursion)の長さに応じたサムホイール32の角度偏位が可能になる。
【0079】
係止シャフト35はカニューレ状であり、ステム38が、シャフト35およびスリーブ31の内側のハンドル30の近位端まで挿入される。カニューレ状の通路を形成する長手方向の孔は、図10の断面図から理解することができるように、先端または遠位端の対応、すなわちつば部44の対応においてのみ、楕円形断面を有する。
【0080】
シャフト35の残りの部分は、図13および14の斜視図から理解することができるように円筒形であるが、やはりスリーブの通路も楕円形断面27を示す。代替方法として、カニューレ状の通路は、縁部が丸い長方形断面を有することができる。
【0081】
ステム38は、大部分が円筒形断面を有する。
【0082】
このステム38の近位端は、図6に明確に示すように、終端の締結ナット39の締結を可能にするためのねじ部37を備える。ナット39は、使用時に機器が分解するのを防止する。
【0083】
ステム38およびハンドル30は、ハンドルの遠位端にあるそれらのインターフェースでは部分的に長方形の断面を有する。これは、ステム38がハンドル30に対して回転できないことを意味する。この実施形態では、係止シャフト35を、サムホイール32によってステム38およびハンドル30に対して回転させることのみが可能である。しかしながら、組み立て段階の間は、ハンドル30内の長方形の対応部を見つけるためにステムを回転させることができる。
【0084】
当業者は、代替的構造が、係止機能をもたらすために、ハンドルに固定された係止シャフトおよび係止シャフトに対して自由に回転できるステムを備えることが可能であることを理解することができる。
【0085】
この実施可能な代替的構造によって、処理をあまり容易にすることはできないが、この解決策は、本発明の原理に沿って問題なく採用される。
【0086】
この実施形態では、カニューレ状シャフト35は、ステム38に対して回転することができる。
【0087】
ボール状の位置決め器43が、締結ナット39がハンドル30から落下するのを防止する。
【0088】
図8および9の例をさらに詳しく参照して、機器12の遠位端部の構造について開示する。
【0089】
捕捉ヘッド10はステム38の遠位の終端部であり、1対の向かい合ったクランプ45、46によって形成される。両クランプは、歯の付いた部分48を有する内側に湾曲した表面を呈し、リブおよび溝は、スプライン状シャフト9のリブ20および溝21の形状に実質的に一致している。
【0090】
ステム38の遠位端には、短い範囲にカット部50が設けられ、したがって2つのクランプ45、46を分離し、それらの間での相互の弾力的な移動を可能にする。カット部50は、シャフトの遠位の楕円形断面の範囲より大きく延びている。
【0091】
2つのクランプ45、46が、カット部50との整列によって生じ得る溝が存在しないように、わずかに異なる構造を有し、非対称であることにも留意すべきである。これによって、インプラント1のスプライン状シャフト9を、常に決まった位置で捉えることが可能になる。
【0092】
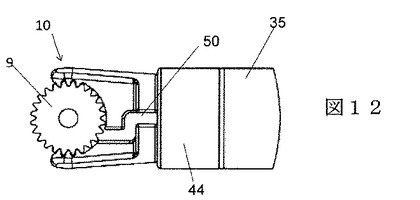
図11および12は、2つの異なる手術位置における位置決め機器12の捕捉ヘッド10を示しており、図11では、インプラント1のスプライン状シャフト9に近付き、図12では、クランプ45、46がスプライン状シャフト9のギヤ形状の上で閉じた状態で、そうしたスプライン状シャフト9を把持している。
【0093】
図17、18および19には、内部の楕円形断面を有するカニューレ状の係止シャフト35の内側における、ステム38の異なる相対位置を示す。
【0094】
図17では、カット部50は、2つのクランプ45、46が互いから遠い静止位置にあることを示している。図17および18では、ステム38の2つの末端部が、一方または他方の+/−90°の角度位置におけるシャフト35の回転によって一方が他方に近付くため、カット部50内のエアギャップが低減されている。しかしながら、さらに小さいわずか10°の角度移動だけでも、クランプ45、46を形成するステムの2つの末端部が近付く移動を開始することができる。
【0095】
把握ヘッド10を係止するための回転移動は、10°から130°の間とすることができる。90°の移動が係止に好ましい選択であるが、機器の構造によって、シャフト35とステム38の間で、連続した0°から130°の間の自由な相対回転を可能にすることができる。
【0096】
清浄化および殺菌のために、機器12のすべての重要な部品を分解することが可能であることに留意すべきである。
【0097】
機器の係止機能は、係止シャフト35の一部であるサムホイール32の助けによって動作する。サムホイールを+/−90°の間で回転させることによって、カニューレ状シャフト35ではステム38に対する相対移動が得られる。10°から90°の間の角度偏位によって、2つのクランプ45、46の把持動作の実施を可能にすることができる。
【0098】
機器12の中心的な要素はステム38であり、ステム38は、ステムの近位端のねじ部37にねじ込まれた締結ナット39の助けによって、ハンドル30の内側に固定することが可能であり、また回転可能なシャフト35を支持する。
【0099】
係止シャフト35は、しっかり締められた差し込み結合33の助けによって、軸方向に沿って機器12上に固定される。
【0100】
インプラント1のスプライン状シャフト9を把持する準備ができた状態である機器12の開放位置を与えるために、静止位置におけるステム38の捕捉ヘッド10を、通常は予め変形させる。
【0101】
シャフト35は、ステム38の上で+/−90°にわたって転向または回転させることが可能であり、カニューレ状シャフト35の楕円形断面によって、均等な回転移動の実施が可能になる。この回転によって、図13および14に示すように、一方を他方に近づける捕捉ヘッド10の2つのクランプ45、46を閉じる移動が生じ、インプラント1のスプライン状シャフト9が把持される。
【0102】
係止シャフト35の内部の楕円形断面は、捕捉ヘッド10を形成し、かつカット部50によって分離されたステム38の2つの遠位部を、図12に示す係止位置に押し進める。
【0103】
この機能は、インプラント1のスプライン状シャフト9を捕捉または解放するために用いられ、複数の角度でインプラントを保持/操作することを可能にする。機器を係止するとき、リブ20が係合され、インプラントをその場(in situ)で操作し正確に位置決めするために、トルクの伝達を可能にする。
【0104】
インプラントと機器の間の角度が少なくとも60°に達すると、機械的な抑止物16は、機器のクランプ45または46の停止面と接触するため、角度がさらに大きくならないようにする。
【0105】
これによって、機器に対するインプラントの位置のフィードバックが与えられる。
【技術分野】
【0001】
本発明は、脊柱の2つの椎体間の固定を可能にする椎間インプラント(intervertebral implant)に関する。
【0002】
より具体的には、本発明は、腰椎柱セグメントの経椎間孔椎体間固定術(TLIF)(Transforaminal Interbody Fusion)用のインプラントに関し、以下の記述では、単にその開示を簡単にするために、この特定の技術分野に焦点をあてる。
【背景技術】
【0003】
この特定の技術分野ではよく知られているように、脊椎手術に最小侵襲性外科術を用いるために様々な試みが行われてきた。
【0004】
この点に関して、いわゆるPLIF(後側方椎体間固定術(Posterior Lateral Interbody Fusion))と呼ばれる手術技術が開発されてきた。そうした手術技術によれば、椎間円板が後部の進入路を通して除かれ、椎間の空間が自己由来の骨で満たされる。
【0005】
このPLIF技術のさらなる発展が、椎間孔経由の進入に基づく、いわゆるTLIF手術技術の利用につながった。この技術によって、自己由来の骨で満たされたチタン製カップ(いわゆる、ケージ)を背側の椎間孔経由で導入することが可能になる。同時に、背側における機器使用および安定化がもたらされる。
【0006】
簡単に述べた方法の利点は、さらに腹腔経由の進入または後腹膜進入を用いる必要がないことである。
【0007】
周知の従来技術の手法が、インプラントおよび導入システムを含む、隣接する頸椎間での脊椎固定を実施するためのシステムに関する特許文献1に記載されている。
【0008】
導入システムは、フォーク状部材および通常の管状係止部材(lock member)を備える。機器の端部のねじ機構が、回転移動を直線移動に変換する。直線移動によって、フォーク状部材の変形、したがって、機器とインプラントの係合が生じる。インプラントと機器の係止はねじ部材によって行われるが、ねじ部材は、簡単なねじ山に比べて作業ステップを簡易化するものではない。
【0009】
90°の係止の場合、必要な操作ステップは少なくなるが、機器によって、インプラントの機器に対する角度調整が可能になるわけではない。
【0010】
他の従来技術の解決策が、円板の空間に椎体スペーサを届けるための方法を記載する特許文献2に開示されている。機器は2つのフィンガを有し、フィンガは相互に移動可能であり、シャフトを動かしてフィンガを作動させるとスペーサを把持するように適合されている。ハンドル部はグリップを備え、そのグリップに向かう引き金(trigger)がフィンガを互いに向かって移動させる。インプラントを、その場(in−situ)で角度調整することはできない。固定は直線移動によって行われる。 他の手法が、脊椎円板の空間内で隣接する椎骨間に脊椎インプラントを位置決めするためのインプラント、機器および方法に関連する特許文献3に記載されている。そのインプラントは、ヒンジ式の鉗子(forceps)先端によって固定される。鉗子先端は、インプラントに対して角度調整することが可能であり、機器は永久的にインプラントに接続される。この解決策は、90°の係止/係止解除機構の代わりに、複雑な機器係止機構を有するが、機器をその場(in−situ)で係合することはできない。
【0011】
他の解決策が、一端に把持デバイスを有するインプラント挿入デバイスに関連する特許文献4に開示されている。顎部が、把持要素間でインプラントを把握する把持位置と、インプラントを解放する解放位置との間を移動することができる。顎部を一斉に把持位置の方に押し進めるために、顎部の上に中空スリーブが摺動可能に配設される。インプラントの固定はスリーブの直線移動によって行われるが、この直線移動は組織に損傷を与える恐れがあり、また90°の係止ほど簡単ではない。
【0012】
他の解決策が、特許文献5に記載されている。その発明は、椎間インプラントに関するものである。機器が、ヒンジ要素によってインプラントに接続される。機器の軸方向のスリーブの回転によって、シャフトの軸方向の移動が生じる。この移動がスペーサを旋回させる。機器をその場(in−situ)で係合することはできない。角度測定は、主に一方向においてのみ可能である。係合/係合解除機構は複雑であるため、90°の係止機構に比べて劣っている。
【0013】
他の従来技術は、腰椎柱セグメントの経椎間孔椎体間固定術用のインプラントに関する発明に関連する特許文献6である。機器への取り付け部は、スロットとして構成される。このスロットの中に、機器を係合することができる。機器は、インプラントに対して様々な角度で固定することができる。インターフェースは、ポジティブ・ロック(positive lock)と比べると安定性に劣る摩擦ロック(friction lock)である。固定はねじ機構によって行われる。係合/係合解除機構は、複数の作業ステップが必要になるため、90°の係止機構に比べて劣っている。
【0014】
他の従来技術が、腰椎柱セグメントの経椎間孔椎体間固定術用のインプラントに関する特許文献7に開示されている。機器への取り付け部は、回転ジョイントとして構成される。回転ジョイントの中に、機器に対するインターフェースとしてねじ山が存在する。機器は、インプラントに対して様々な角度で固定することができる。インターフェースは、ポジティブ・ロックと比べると安定性に劣る摩擦ロックである。さらに、ねじ山によってその場(in−situ)で係合することはできない。インプラントの機器に対する固定は、90°の係止機器に比べるとより困難である。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第6,923,814号明細書
【特許文献2】米国特許第6,159,215号明細書
【特許文献3】米国特許出願公開第2006/0235426号明細書
【特許文献4】米国特許第066174号明細書
【特許文献5】米国特許出願公開第2004/0153065号明細書
【特許文献6】米国特許出願公開第2005/0096745号明細書
【特許文献7】欧州特許第1841385号明細書
【発明の概要】
【発明が解決しようとする課題】
【0016】
上記内容に基づき、本発明の目的は、改良された、腰椎柱セグメントの経椎間孔椎間固定術用のインプラントを提供することである。
【0017】
そうしたインプラントは、高い一次安定性を有しまた使用時には簡単な手術手順を可能にするものでなければならない。
【0018】
さらにインプラントは、きわめて単純な構造を有し、低コストで経済的なものであることを要する。
【課題を解決するための手段】
【0019】
本発明の解決策の概念は、位置決め機器の把持端部を受け入れるための係合部を有する、脊柱の2つの椎体間の固定のための改良されたインプラントを提供し、係合部の特定の形状によって、そうした把持端部のきわめて強く、かつ安定した把持を可能にすることである。
【0020】
この解決策の概念によれば、前述の技術的な問題は、脊柱の2つの椎体間の固定のための椎間インプラントであって、
−2つの相対する表面を有し、骨が成長する間、充填するための孔または空洞を含む本体と、
−位置決め機器の把持端部を受け入れるための係合部であって、前記本体の開口部を通して接近可能なスプライン状シャフトとして成形された係合部と
を備える椎間インプラントによって解決される。
【0021】
インプラント本体およびスプライン状シャフトは、例えば射出成形によって、生体適合性かつ放射線透過性の合成材料で一体構造として製造される。代替方法として、前記スプライン状シャフトは、生体適合性の金属または金属合金によって実現することができ、インプラント本体を形成する生体適合性かつ放射線透過性の合成材料の内側で合体させ、これによって、前記把持端部と係合部のより強い係合が可能になる。
【0022】
有利には、スプライン状シャフトは、前記相対する表面の間で前記本体に埋め込まれる。より詳細には、スプライン状シャフトは、軸が前記相対する表面に実質的に垂直な状態で前記本体に埋め込まれる。
【0023】
さらに、スプライン状シャフトは、ギヤのように規則的な角度間隔に配置された複数の周縁リブを有する。
【0024】
より詳細には、スプライン状シャフトは、規則的な比較的小さいピッチを有する溝(groove)と規則的に交互に配置されてシャフトのギヤ形状を形成する、複数のリブを有する。この特定の形状によって、埋め込まれた部分をインプラント本体によって強く把持することが可能になり、その結果、インプラント本体とスプライン状シャフトの間には、それらが異なる材料で製造されている場合、強い機械的な一体化および固定が得られる。
【0025】
スプライン状シャフトへの接近を可能にする開口部は、少なくとも1つの横方向の壁によって境界を定められ、前記横方向の壁は、位置決め機器の把持端部について実施可能な角度方向付けに対する横方向の抑止物になることに留意すべきである。したがって、スプライン状シャフトは、その横周縁部の約270°にわたる前記開口部を通して接近することができる。
【0026】
インプラント本体は一端に、いわゆる挿入用突出部(insertion nose)を有し、前記スプライン状シャフトは、前記挿入用突出部に対して反対側の端部から接近することができる。
【0027】
スプライン状シャフトがインプラント本体の一端の近くに存在することによって、前記インプラント本体内の、前記挿入用突出部の端部の近くにのみマーカが埋め込まれる。
【0028】
前記相対する表面は、わずかにドーム状の形状を呈する。
【0029】
本発明は、また、請求項1に記載のインプラントのための位置決め機器であって、
−近位端および遠位端を有するハンドルと、
−前記ハンドルの前記遠位端から延在する係止シャフトと、
−前記シャフトの遠位端に位置する把握ヘッドと
を備える位置決め機器であり、、
前記係止シャフトはカニューレ状であり、ハンドルを貫通するカニューレ状シャフトの内側にステムが収容され、
前記シャフトは、前記ステムの上で回転可能であり、
前記把握ヘッドは前記ステムの遠位端に形成され、1対のクランプが前記ステムの角回転に応じて開閉することを特徴とする位置決め機器に関する。
【0030】
有利には、前記カニューレ状の係止シャフトは、内部の楕円形断面を有する。
【0031】
本発明のインプラントおよび位置決め機器の他の特徴および利点は、図面を参照すれば、非限定的な例として示される以下の記述から明らかになるであろう。
【図面の簡単な説明】
【0032】
【図1】本発明による脊柱の2つの椎体間の固定のためのインプラントの斜視図である。
【図2】図1のインプラントの側面図である。
【図3】図1のインプラントの上面図である。
【図4】A−A線に沿って得られる図1のインプラントの側部の部分断面図である。
【図5】図1のインプラントを移植するために用いることができる位置決め機器の側面図である。
【図6】B−B線に沿って得られる図5の機器の断面図である。
【図7】図5の機器の斜視図である。
【図8】図5および7に示す機器の遠位部の斜視図である。
【図9】図8の遠位部の断面図である。
【図10】図6のF−F線に沿って得られる機器の遠位部の断面図である。
【図11】一手術状態における機器の遠位部の側面図である。
【図12】別の手術状態における機器の遠位部の側面図である。
【図13】図5および7の機器の別個の部分の斜視図である。
【図14】図13の細部の斜視図である。
【図15】本発明の機器の細部の正面図である。
【図16】本発明の機器の他の細部の斜視図である。
【図17】一手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
【図18】別の手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
【図19】さらに別の手術状態における、図6のF−F線に沿って得られる機器の遠位部の断面図である。
【発明を実施するための形態】
【0033】
図面を参照すると、脊柱の2つの椎体間の固定を可能にするために本発明によって実現される椎間インプラントが、包括的に1で示されている。インプラント1は、具体的には椎体間固定デバイスとして使用するためのものである。
【0034】
インプラント1は、具体的には、最新の最小侵襲性外科術の必要に応じた椎骨手術を可能にするために実現されたものである。インプラント1は主に、TLIF(経椎間孔腰椎椎間固定術(Transforaminal Lombar Intervertebral Fusion))の外科術での使用に専用のものであるが、PLIFまたはOILFなどの他の外科技術でも問題なく採用することができる。
【0035】
インプラント1は、生体適合性かつ放射線透過性の合成材料、例えば好適な弾性係数を有するポリエーテルエーテルケトン(PEEK)構造によって実現された本体2を有する。
【0036】
しかしながら、例えばチタンコーティングの有無にかかわらず、他の適切なインプラント材料を用いることもできる。
【0037】
本体2はインゲンマメ(Kidney−bead)のような形をしており、複数の異なる高さ、幅および長さで利用することができる。
【0038】
この合成材料がX線を透過するため、インプラント本体2の生体適合性の合成材料には従来からいくつかのマーカ18が組み込まれ、取り付け時に外科医がインプラントを識別することを可能にする。例えば、いわゆる後方または前方マーカピン28を本体2の構造の内側で合体させ、インプラントがはっきりと容易に見えるようにすることができる。
【0039】
こうしたX線マーカの例が、図1および3に数字18および28で示されている。しかしながら、こうしたマーカ18、28の数はさらに多くてもよく、またインプラント本体2の主軸に従って、またはそうした軸に交差するように向きを定めることができる。マーカは互いに平行にすること、または重なり合う軸が一点に集まるようにすることができる。
【0040】
本体2は、椎骨終板の解剖学的構造に適合するように、脊柱と直接接触する2つの対向する表面3および4を有する。本体2は、骨の成長(例えば自己生成の移植骨)を可能にするという目的を満たすために、孔5または空洞6を含む。例えば、孔5はAP骨の成長のために設けられ、空洞6は尾部−頭部の骨の成長のために設けられる。
【0041】
表面3および4はそれぞれ、わずかにドーム状の形をしている。
【0042】
表面3、4にはそれぞれ、インプラント1が移植されるとき、最初に安定化させ、また椎骨終板の対応する当接面(abutting surface)に対するこれらの表面3、4の把持また付着を改善するために、複数の歯11が設けられる。歯11は、表面3および4のそれぞれの上に規則的に分散させる。
【0043】
全体として図2の上面図に示すように、本体2はわずかに湾曲した形を有し、両端部は丸い縁部を有する。一方の端部15は挿入用突出部と呼ばれ、本体2の表面3および4は、自己転向(self−distracting)機能をもたらし挿入を助けるものとして働く、前記端部15に対応するテーパ部13および14を呈し、挿入を容易にする。
【0044】
有利には、本発明に従って、本体2には位置決め機器12の把持端部10を受け入れるための係合部7が設けられる。
【0045】
係合部7は、本体2の横方向の開口部8を通って接近することができる、ギヤと同様のスプライン状シャフト9である。このスプライン状シャフト9は、表面3および4の平面に実質的に垂直な軸を有する。
【0046】
図4の断面図に明確に示されるように、スプライン状シャフト9の一部25は本体2に埋め込まれているが、それに対して、大部分は開口部8を通して接近可能である。
【0047】
この接近可能なまたは露出した部分25は、180°から320°の間の開度を伴うことができる。
【0048】
この部分25は、具体的には、インプラント本体2とスプライン状シャフト9が異なる材料で実現されるときには射出成形で設けることができ、その他の場合には、その部分25は一体構造としてインプラント本体2と簡単に一体成形される。有利には、スプライン状シャフト9は、その周縁面に沿って複数のリブ20を呈する実質的に円筒形の形状を有する。そうしたリブ20は、溝21によってギヤのように規則的な角度間隔に配置され、10から80個までの様々な数で設けられる。
【0049】
より詳細には、スプライン状シャフト9は、規則的な比較的小さいピッチを有する溝21と規則的に交互に配置されてシャフトのギヤ形状を形成する、複数のリブ20を有する。この特定の形状によって、インプラント本体2が埋め込まれた部分25を強く把持することが可能になり、その結果、インプラント本体2とスプライン状シャフト9との間には、それらが異なる材料で製造されている場合、強い機械的な一体化および固定が存在するようになる。
【0050】
インプラント本体およびスプライン状シャフトが一体構造で得られる場合には、プライン状シャフト9の接近可能な部分25が、交互に配置されたリブ20および溝21からなる部分的に円筒形の突起を呈するようになることに留意すべきである。
【0051】
インプラント1は、機器12の把持端部によって、スプライン状シャフト9を介してクランプすることができるが、このクランプ動作は、以下において理解されるように、接近可能な部分25の様々な部分で実施することができる。
【0052】
スプライン状シャフト9は、機器12の捕捉ヘッド10とインプラント1との間のポジティブ・ロックをもたらす。
【0053】
開口部8は、少なくとも1つの横方向の壁16によって境界を定められ、横方向の壁16は、捕捉ヘッド10がスプライン状シャフト9と係合しているとき、機器12の捕捉ヘッド10について実施可能な角度方向付けに対する横方向の抑止物になる。
【0054】
この機械的な抑止物16は、位置決めまたは挿入用の機器12に対するインプラント1の位置のフィードバックを与える。
【0055】
スプライン状シャフト9によって、インプラント1に対する複数の予め定められた位置に機器12の捕捉ヘッド10を固定することが可能になる。
【0056】
さらに、インターフェースによって、機器とインプラントの間で最大量のトルクならびに高い軸力(axial force)を伝えることが可能になる。
【0057】
これまでに言及したように、インプラント本体2を実現する材料は、スプライン状シャフト9を実現する材料と同じものとすることができる。代替方法として、2つの材料が有利には異なってもよい。
【0058】
例えば出願人の権利を制限することなく、インプラント1の本体2をPEEKで製造し、スプライン状シャフト9を適切な生体適合性合金、例えばチタンまたはチタン合金によって製造することができる。
【0059】
そうした材料の組み合わせによって、引張りならびにねじりに関する機器/インプラントのインターフェースの強度が、実現可能な純粋なPEEKのインターフェースに比べてずっと強くなる。 さらに、金属のスプライン状シャフト9が存在することによって、好ましくは開口部8に対してインプラント1の反対側に、すなわち挿入用突出部15の近くに配置された、ただ1対のマーカ18を採用することが可能になる。これは、スプライン状シャフト9の形状により、例えば反対側に配置されたただ1対のマーカ18と組み合わせて、インプラント1の位置を簡単に識別することが可能になるためである。
【0060】
スプライン状シャフト9は、既存のインターフェースシステムと比べると、より高い剛性のインターフェース、ならびに処理に対するより高い自由度をもたらし、その場(in situ)でインプラントを回転させるのに必要なトルクの伝達を可能にする。
【0061】
従来技術には、既存のインプラントと比べて優れた処理の可能性をもたらす、PEEKの本体2およびチタンのスプライン状シャフト9を用いたハイブリッド型のインプラントは記載されていない。
【0062】
本発明のインプラントは多くの利点を有しており、例えばそれはきわめて単純で低コストの構成を有し、インプラントを、隣接する椎骨間の椎間腔の中に挿入する、または椎間腔から取り除くための機器によって、簡単にかつしっかりと処理することができる。 インプラントの構造によって、機器はその場(in−situ)での操作に、従来技術のすべての処理および係止機構よりもずっと小さい空間しか必要としないが、その空間は、外科医による切開の大きさを決めるため重大である。この機能により、インプラントを最小断面の方向に挿入し、その場(in situ)で正確な位置に回転させることができるようになるため、最小侵襲性の移植が可能になる。
【0063】
さらに機器とインプラントとの間の安定した係止によって、インプラントのその場(in−situ)での完全に制御された角度調整性が可能になる。
【0064】
次に、図5から19の例を参照して、前述のインプラント1の処理に用いられる位置決め機器12について以下に詳しく開示する。
【0065】
本発明は、脊柱内でインプラント1のような椎間インプラントを位置決めするように構成された機器12にも関する。
【0066】
機器12によって、インプラント1のようなインプラントを、機器の捕捉ヘッドおよび迅速な90°の楕円形の係止機構によって簡単に把握することが可能になる。
【0067】
接続は、インプラント1内のスプライン状シャフト9のリブおよび溝、ならびに機器に対するある予め決められた位置における固定、または複数の予め決められた位置における固定を可能にする捕捉ヘッド10を形成する、クランプ45、46の対応する歯によって可能になる。
【0068】
従来技術には異なる捕捉機構が記載されているが、そうした機器はすべて、インプラントを機器に固定するための複数回の回転、もしくは機器に対するかなりの直線移動、または複雑なヒンジ機構を必要とする。
【0069】
以下において理解されるように、機器のサムホイールの単純な90°の回転によって、インプラント1または同様のインプラント構造体の係合および係合解除を著しく簡易にする係止機構がもたらされる。
【0070】
さらに、かなりの軸方向の変位を伴う周知の機器は、組織の損傷を引き起こす恐れがある。プライヤ(pliers)状の機器は通常、過大な空間を必要とするが、その空間は、機器がより大きい切開を必要とするため、そうした用途において重大であり、通常は、プライヤ状の機器を最小侵襲性外科術に使用することができない。
【0071】
TLIFインプラント用の位置決め機器12は、様々な構成要素を備える。
【0072】
ハンドル30は、機器12をしっかり保持することを可能にする。ハンドルの内側には、細長いスリーブ31が収容されている。このスリーブ31の遠位端33は、ハンドル30の同じ軸と整列させたX軸に沿って延在する係止シャフト35に接続されている。
【0073】
係止シャフト35は、捕捉ヘッド10を含む遠位端部で終了する。
【0074】
係止シャフト35の遠位端にはつば(collar)部44が取り付けられ、捕捉ヘッド10は前記鍔部44の外側に延在する。
【0075】
係止シャフト35はハンドル30より長く、シャフト35とスリーブ31の遠位端との間の接続は、サムホイール32によって保護される。サムホイール32とスリーブ31の遠位端33との間の接続は、様々な方法で得ることができるが、この実施形態では、図14に示すように差し込み結合34が好ましい。
【0076】
さらに詳細には、図15および16に示すように、スリーブ31の遠位端33には、L字形を有する溝23が設けられている。この溝の第1の部分24は、シャフト35の軸X−Xに平行に延び、この溝23の第2の部分26は、第1の溝部分24に垂直に、用途の必要性に応じて10°から130°まで変化することができる所定の角度範囲にわたって延びる。
【0077】
サムホイール32の空洞34の内側に、ピン29を突出させる。
【0078】
このピン29は、サムホイール32がスリーブ31の遠位端33に取り付けられるとき、第1の溝部分24に挿入される。次いで、ピン29は、L字形の溝23の第2の溝部分26に捉えられ、第2の溝部分26の角度偏位(angular excursion)の長さに応じたサムホイール32の角度偏位が可能になる。
【0079】
係止シャフト35はカニューレ状であり、ステム38が、シャフト35およびスリーブ31の内側のハンドル30の近位端まで挿入される。カニューレ状の通路を形成する長手方向の孔は、図10の断面図から理解することができるように、先端または遠位端の対応、すなわちつば部44の対応においてのみ、楕円形断面を有する。
【0080】
シャフト35の残りの部分は、図13および14の斜視図から理解することができるように円筒形であるが、やはりスリーブの通路も楕円形断面27を示す。代替方法として、カニューレ状の通路は、縁部が丸い長方形断面を有することができる。
【0081】
ステム38は、大部分が円筒形断面を有する。
【0082】
このステム38の近位端は、図6に明確に示すように、終端の締結ナット39の締結を可能にするためのねじ部37を備える。ナット39は、使用時に機器が分解するのを防止する。
【0083】
ステム38およびハンドル30は、ハンドルの遠位端にあるそれらのインターフェースでは部分的に長方形の断面を有する。これは、ステム38がハンドル30に対して回転できないことを意味する。この実施形態では、係止シャフト35を、サムホイール32によってステム38およびハンドル30に対して回転させることのみが可能である。しかしながら、組み立て段階の間は、ハンドル30内の長方形の対応部を見つけるためにステムを回転させることができる。
【0084】
当業者は、代替的構造が、係止機能をもたらすために、ハンドルに固定された係止シャフトおよび係止シャフトに対して自由に回転できるステムを備えることが可能であることを理解することができる。
【0085】
この実施可能な代替的構造によって、処理をあまり容易にすることはできないが、この解決策は、本発明の原理に沿って問題なく採用される。
【0086】
この実施形態では、カニューレ状シャフト35は、ステム38に対して回転することができる。
【0087】
ボール状の位置決め器43が、締結ナット39がハンドル30から落下するのを防止する。
【0088】
図8および9の例をさらに詳しく参照して、機器12の遠位端部の構造について開示する。
【0089】
捕捉ヘッド10はステム38の遠位の終端部であり、1対の向かい合ったクランプ45、46によって形成される。両クランプは、歯の付いた部分48を有する内側に湾曲した表面を呈し、リブおよび溝は、スプライン状シャフト9のリブ20および溝21の形状に実質的に一致している。
【0090】
ステム38の遠位端には、短い範囲にカット部50が設けられ、したがって2つのクランプ45、46を分離し、それらの間での相互の弾力的な移動を可能にする。カット部50は、シャフトの遠位の楕円形断面の範囲より大きく延びている。
【0091】
2つのクランプ45、46が、カット部50との整列によって生じ得る溝が存在しないように、わずかに異なる構造を有し、非対称であることにも留意すべきである。これによって、インプラント1のスプライン状シャフト9を、常に決まった位置で捉えることが可能になる。
【0092】
図11および12は、2つの異なる手術位置における位置決め機器12の捕捉ヘッド10を示しており、図11では、インプラント1のスプライン状シャフト9に近付き、図12では、クランプ45、46がスプライン状シャフト9のギヤ形状の上で閉じた状態で、そうしたスプライン状シャフト9を把持している。
【0093】
図17、18および19には、内部の楕円形断面を有するカニューレ状の係止シャフト35の内側における、ステム38の異なる相対位置を示す。
【0094】
図17では、カット部50は、2つのクランプ45、46が互いから遠い静止位置にあることを示している。図17および18では、ステム38の2つの末端部が、一方または他方の+/−90°の角度位置におけるシャフト35の回転によって一方が他方に近付くため、カット部50内のエアギャップが低減されている。しかしながら、さらに小さいわずか10°の角度移動だけでも、クランプ45、46を形成するステムの2つの末端部が近付く移動を開始することができる。
【0095】
把握ヘッド10を係止するための回転移動は、10°から130°の間とすることができる。90°の移動が係止に好ましい選択であるが、機器の構造によって、シャフト35とステム38の間で、連続した0°から130°の間の自由な相対回転を可能にすることができる。
【0096】
清浄化および殺菌のために、機器12のすべての重要な部品を分解することが可能であることに留意すべきである。
【0097】
機器の係止機能は、係止シャフト35の一部であるサムホイール32の助けによって動作する。サムホイールを+/−90°の間で回転させることによって、カニューレ状シャフト35ではステム38に対する相対移動が得られる。10°から90°の間の角度偏位によって、2つのクランプ45、46の把持動作の実施を可能にすることができる。
【0098】
機器12の中心的な要素はステム38であり、ステム38は、ステムの近位端のねじ部37にねじ込まれた締結ナット39の助けによって、ハンドル30の内側に固定することが可能であり、また回転可能なシャフト35を支持する。
【0099】
係止シャフト35は、しっかり締められた差し込み結合33の助けによって、軸方向に沿って機器12上に固定される。
【0100】
インプラント1のスプライン状シャフト9を把持する準備ができた状態である機器12の開放位置を与えるために、静止位置におけるステム38の捕捉ヘッド10を、通常は予め変形させる。
【0101】
シャフト35は、ステム38の上で+/−90°にわたって転向または回転させることが可能であり、カニューレ状シャフト35の楕円形断面によって、均等な回転移動の実施が可能になる。この回転によって、図13および14に示すように、一方を他方に近づける捕捉ヘッド10の2つのクランプ45、46を閉じる移動が生じ、インプラント1のスプライン状シャフト9が把持される。
【0102】
係止シャフト35の内部の楕円形断面は、捕捉ヘッド10を形成し、かつカット部50によって分離されたステム38の2つの遠位部を、図12に示す係止位置に押し進める。
【0103】
この機能は、インプラント1のスプライン状シャフト9を捕捉または解放するために用いられ、複数の角度でインプラントを保持/操作することを可能にする。機器を係止するとき、リブ20が係合され、インプラントをその場(in situ)で操作し正確に位置決めするために、トルクの伝達を可能にする。
【0104】
インプラントと機器の間の角度が少なくとも60°に達すると、機械的な抑止物16は、機器のクランプ45または46の停止面と接触するため、角度がさらに大きくならないようにする。
【0105】
これによって、機器に対するインプラントの位置のフィードバックが与えられる。
【特許請求の範囲】
【請求項1】
脊柱の2つの椎体間の固定のための椎間インプラント(1)であって、
2つの相対する表面(3、4)を有し、骨が成長する間に充填するための孔(5)または空洞(6)を含む本体(2)と、
位置決め機器(12)の把持端部(10)を受け入れるための係合部(7)であって、前記本体(2)の開口部(8)を通して接近可能なスプライン状シャフト(9)として成形された係合部(7)と
を備え、
前記スプライン状シャフト(9)は、ギヤのように溝(21)によって規則的な角度間隔に配置された複数の周縁リブ(20)を有することを特徴とする椎間インプラント(1)。
【請求項2】
前記本体(2)および前記スプライン状シャフト(9)はどちらも、生体適合性かつ放射線透過性の合成材料によって一体構造として製造されていることを特徴とする請求項1に記載のインプラント。
【請求項3】
前記本体(2)は、生体適合性かつ放射線透過性の合成材料で製造され、
前記係合部のスプライン状シャフト(9)は、生体適合性の金属または金属合金によって実現されていることを特徴とする請求項1に記載のインプラント。
【請求項4】
前記スプライン状シャフト(9)は、軸が前記相対する表面(3、4)に対して実質的に垂直な状態で、前記インプラント本体(2)に埋め込まれていることを特徴とする請求項1に記載のインプラント。
【請求項5】
前記開口部(8)は、180°から320°の間の角度範囲で実現することができ、
前記開口部の少なくとも1つの横方向の壁(16)は、前記位置決め機器(12)の前記把持端部(10)について実施可能な角度方向付けに対する横方向の抑止物になることを特徴とする請求項1に記載のインプラント。
【請求項6】
前記インプラント本体(2)は、一端に挿入用突出部(15)を有し、
前記スプライン状シャフト(9)は、前記挿入用突出部(15)に対して反対側の端部から接近可能であることを特徴とする請求項1に記載のインプラント。
【請求項7】
前記インプラント本体(2)内の前記挿入用突出部の端部(15)の近くにのみ、マーカ(18、19)が埋め込まれていることを特徴とする請求項1に記載のインプラント。
【請求項8】
近位端および遠位端を有するハンドル(30)と、
前記ハンドル(30)の前記遠位端から延在する係止シャフト(35)と、
前記機器(12)の前記遠位端にある把握ヘッド(10)と
を備える、請求項1から7のいずれかに記載のインプラントのための位置決め機器(12)であって
、
前記係止シャフト(35)はカニューレ状であり、前記カニューレ状シャフト(35)の内側にステム(38)が収容され、前記ハンドル(30)に固定され、
前記シャフト(35)は、前記ステム(38)に対して自由に回転可能であり、
前記把握ヘッド(10)は、前記ステム(38)の前記遠位端に形成され、1対のクランプ(45、46)が、前記ステム(38)に対する前記シャフト(35)の相対的な角回転に応じて開閉することを特徴とする位置決め機器。
【請求項9】
前記カニューレ状の係止シャフト(35)は、その遠位端に内部の楕円形断面を有し、相対的な角回転の間、前記ステムに干渉することを特徴とする請求項8に記載の位置決め機器。
【請求項10】
前記ステム(38)の前記遠位端にカット部(50)が設けられ、前記2つのクランプ(45、46)を分離し、前記2つのクランプ(45、46)の間での相互の弾力的な移動を可能にすることを特徴とする請求項8に記載の位置決め機器。
【請求項11】
前記ハンドル(30)の内側に、遠位端(31)が前記ハンドル(30)から突出するスリーブ(31)が組み込まれ、
前記シャフト(35)は、サムホイール(32)によって前記遠位端(33)に回転可能に取り付けられていることを特徴とする請求項8に記載の位置決め機器。
【請求項12】
前記カット部(50)は、前記シャフトの内部の楕円形断面の範囲より大きく延びていることを特徴とする請求項9に記載の位置決め機器。
【請求項13】
係止動作は、前記係止シャフト(35)または前記ステム(38)の前記ハンドル(30)に対する、10°から130°の間の相対的な角度移動によって実行されることを特徴とする請求項9に記載の位置決め機器。
【請求項14】
前記クランプ(45、46)は非対称であり、歯の付いた部分(48)を有する内側に湾曲した表面を呈し、リブおよび溝は、前記スプライン状シャフト(9)の前記リブ(20)および前記溝(21)の形状に実質的に一致していることを特徴とする請求項10に記載の位置決め機器。
【請求項15】
前記ステム(38)は、前記ハンドルに固定された係止シャフト(35)に対して回転可能であることを特徴とする請求項8に記載の位置決め機器。
【請求項1】
脊柱の2つの椎体間の固定のための椎間インプラント(1)であって、
2つの相対する表面(3、4)を有し、骨が成長する間に充填するための孔(5)または空洞(6)を含む本体(2)と、
位置決め機器(12)の把持端部(10)を受け入れるための係合部(7)であって、前記本体(2)の開口部(8)を通して接近可能なスプライン状シャフト(9)として成形された係合部(7)と
を備え、
前記スプライン状シャフト(9)は、ギヤのように溝(21)によって規則的な角度間隔に配置された複数の周縁リブ(20)を有することを特徴とする椎間インプラント(1)。
【請求項2】
前記本体(2)および前記スプライン状シャフト(9)はどちらも、生体適合性かつ放射線透過性の合成材料によって一体構造として製造されていることを特徴とする請求項1に記載のインプラント。
【請求項3】
前記本体(2)は、生体適合性かつ放射線透過性の合成材料で製造され、
前記係合部のスプライン状シャフト(9)は、生体適合性の金属または金属合金によって実現されていることを特徴とする請求項1に記載のインプラント。
【請求項4】
前記スプライン状シャフト(9)は、軸が前記相対する表面(3、4)に対して実質的に垂直な状態で、前記インプラント本体(2)に埋め込まれていることを特徴とする請求項1に記載のインプラント。
【請求項5】
前記開口部(8)は、180°から320°の間の角度範囲で実現することができ、
前記開口部の少なくとも1つの横方向の壁(16)は、前記位置決め機器(12)の前記把持端部(10)について実施可能な角度方向付けに対する横方向の抑止物になることを特徴とする請求項1に記載のインプラント。
【請求項6】
前記インプラント本体(2)は、一端に挿入用突出部(15)を有し、
前記スプライン状シャフト(9)は、前記挿入用突出部(15)に対して反対側の端部から接近可能であることを特徴とする請求項1に記載のインプラント。
【請求項7】
前記インプラント本体(2)内の前記挿入用突出部の端部(15)の近くにのみ、マーカ(18、19)が埋め込まれていることを特徴とする請求項1に記載のインプラント。
【請求項8】
近位端および遠位端を有するハンドル(30)と、
前記ハンドル(30)の前記遠位端から延在する係止シャフト(35)と、
前記機器(12)の前記遠位端にある把握ヘッド(10)と
を備える、請求項1から7のいずれかに記載のインプラントのための位置決め機器(12)であって
、
前記係止シャフト(35)はカニューレ状であり、前記カニューレ状シャフト(35)の内側にステム(38)が収容され、前記ハンドル(30)に固定され、
前記シャフト(35)は、前記ステム(38)に対して自由に回転可能であり、
前記把握ヘッド(10)は、前記ステム(38)の前記遠位端に形成され、1対のクランプ(45、46)が、前記ステム(38)に対する前記シャフト(35)の相対的な角回転に応じて開閉することを特徴とする位置決め機器。
【請求項9】
前記カニューレ状の係止シャフト(35)は、その遠位端に内部の楕円形断面を有し、相対的な角回転の間、前記ステムに干渉することを特徴とする請求項8に記載の位置決め機器。
【請求項10】
前記ステム(38)の前記遠位端にカット部(50)が設けられ、前記2つのクランプ(45、46)を分離し、前記2つのクランプ(45、46)の間での相互の弾力的な移動を可能にすることを特徴とする請求項8に記載の位置決め機器。
【請求項11】
前記ハンドル(30)の内側に、遠位端(31)が前記ハンドル(30)から突出するスリーブ(31)が組み込まれ、
前記シャフト(35)は、サムホイール(32)によって前記遠位端(33)に回転可能に取り付けられていることを特徴とする請求項8に記載の位置決め機器。
【請求項12】
前記カット部(50)は、前記シャフトの内部の楕円形断面の範囲より大きく延びていることを特徴とする請求項9に記載の位置決め機器。
【請求項13】
係止動作は、前記係止シャフト(35)または前記ステム(38)の前記ハンドル(30)に対する、10°から130°の間の相対的な角度移動によって実行されることを特徴とする請求項9に記載の位置決め機器。
【請求項14】
前記クランプ(45、46)は非対称であり、歯の付いた部分(48)を有する内側に湾曲した表面を呈し、リブおよび溝は、前記スプライン状シャフト(9)の前記リブ(20)および前記溝(21)の形状に実質的に一致していることを特徴とする請求項10に記載の位置決め機器。
【請求項15】
前記ステム(38)は、前記ハンドルに固定された係止シャフト(35)に対して回転可能であることを特徴とする請求項8に記載の位置決め機器。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】

【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−232124(P2012−232124A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−100502(P2012−100502)
【出願日】平成24年4月26日(2012.4.26)
【出願人】(512073792)メダクタ・インターナショナル・ソシエテ・アノニム (2)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−100502(P2012−100502)
【出願日】平成24年4月26日(2012.4.26)
【出願人】(512073792)メダクタ・インターナショナル・ソシエテ・アノニム (2)
【Fターム(参考)】
[ Back to top ]