
車輪型ロボット

【課題】基体の傾斜や転倒を抑制することが可能な、車輪型ロボットを提供する。
【解決手段】被案内者が把持する把持部を取り付けた基体の水平面に対する傾斜角度を検出する基体傾斜角検出部112と、基体と把持部への入力に応じて基体を移動させる移動部とを、基体傾斜角検出部112が検出した傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構を駆動させるロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部114と、把持部への入力に応じて基体を移動させる駆動輪が走行する走行路の路面と基体との距離である路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪を駆動させる走行用モータの駆動状態を駆動輪が停止するように制御する走行用モータ駆動制御部110を備える。
【解決手段】被案内者が把持する把持部を取り付けた基体の水平面に対する傾斜角度を検出する基体傾斜角検出部112と、基体と把持部への入力に応じて基体を移動させる移動部とを、基体傾斜角検出部112が検出した傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構を駆動させるロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部114と、把持部への入力に応じて基体を移動させる駆動輪が走行する走行路の路面と基体との距離である路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪を駆動させる走行用モータの駆動状態を駆動輪が停止するように制御する走行用モータ駆動制御部110を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪型ロボットに関し、特に、目的地の場所を認識していない被案内者を目的地へ案内したり、目の見えない人の移動をサポートする車輪型ロボットに関する。
【背景技術】
【0002】
従来から、例えば、目的地を初めて訪問する人等、目的地の場所を明確に認識しておらず、目的地までの移動が困難な被案内者を目的地へ案内するための車輪型ロボットとして、例えば、特許文献1に記載の車輪型ロボットがある。
特許文献1に記載の車輪型ロボットは、基体を移動させるために駆動輪を駆動させる走行用モータと、走行用モータの駆動状態を制御するモータ制御部と、基体へ取り付けられた把持部と、被案内者による把持部への入力を検出する入力値検出部を備えている。
そして、特許文献1に記載の車輪型ロボットでは、モータ制御部が、入力値検出部が検出した入力に応じて基体の目標速度を算出し、この算出した目標速度で基体が移動するように、走行用モータの駆動状態を制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010‐271911号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の車輪型ロボットでは、斜面の走行時に、基体が大きく傾斜して不安定になり、被案内者が把持部を把持することが困難となるという問題が発生するおそれがある。
また、特許文献1に記載の車輪型ロボットでは、センサが故障したり、センサが反応しない段差等があった場合に、車輪が走行路から脱輪したり、それに伴い、基体が転倒するという問題が発生するおそれがある。
本発明は、上記のような問題点に着目してなされたもので、斜面の走行時における基体の傾斜や、車輪の脱輪及びそれに伴う基体の転倒を抑制することが可能な、車輪型ロボットを提供することを課題とする。
【課題を解決するための手段】
【0005】
〔発明1〕 上記課題を解決するために、発明1の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御することを特徴とする。
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。
【0006】
〔発明2〕 発明2の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする。
このような構成であれば、車輪型ロボットの進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となる。
【0007】
〔発明3〕 発明3の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御し、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする。
【0008】
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。これに加え、車輪型ロボットの進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となる。
【0009】
〔発明4〕 発明4の車輪型ロボットは、発明1または発明3の車輪型ロボットにおいて、前記ロールピッチ機構は、前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って相対移動可能に連結することを特徴とする。
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、車輪型ロボットの重心の変位を抑制するとともに、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。
【0010】
〔発明5〕 発明5の車輪型ロボットは、発明2または発明3の車輪型ロボットにおいて、前記路車間距離検出部が前記路車間距離を検出する検出方向を、前記路車間距離検出部から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたことを特徴とする。
このような構成であれば、駆動輪が脱落せずに走行可能な溝等が、車輪型ロボットの進行方向に存在している場合に、走行用モータ駆動制御部が、路車間距離が許容距離を超えていると誤判定することを、防止することが可能となる。
【0011】
〔発明6〕 発明6の車輪型ロボットは、発明1から発明5のうちいずれかの車輪型ロボットにおいて、前記車輪型ロボットを支持する複数の車輪と、
前記複数の車輪が前記路面に接地している状態で、前記路面よりも上方に配置されている滑落抑制部と、を備え、
前記滑落抑制部は、前記複数の車輪のうち少なくとも一つを除く車輪が前記路面から脱輪した状態で、前記路面と接触することを特徴とする。
このような構成であれば、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部を路面と接触させることが可能となる。
【0012】
〔発明7〕 発明7の車輪型ロボットは、発明1から発明6のうちいずれかの車輪型ロボットにおいて、前記移動部に対して前記把持部の位置を変化させる把持部位置変化機構と、
前記被案内者が前記把持部を把持していない状態で、前記把持部に対する前記被案内者の手の位置を検出する手掌位置検出部と、
前記把持部位置変化機構を駆動させる把持部位置変化機構駆動部と、
前記把持部位置変化機構駆動部の駆動状態を制御する把持部位置変化機構駆動制御部と、を備え、
前記把持部位置変化機構駆動制御部は、前記手掌位置検出部が位置を検出した前記被案内者の手の下方へ前記把持部が移動するように、前記把持部位置変化機構駆動部の駆動状態を制御することを特徴とする。
このような構成であれば、被案内者の手が把持部から離れていても、被案内者が把持部に手を近づけると、移動部の位置を変化させず、被案内者の手の下方へ把持部が移動するように、移動部に対して把持部の位置を変化させることが可能となる。
【0013】
〔発明8〕 発明8の車輪型ロボットは、発明7の車輪型ロボットにおいて、前記手掌位置検出部は、
互いに並列に接続された複数の第1光センサ素子を有し、且つ複数の前記第1光センサ素子が円環状に配置される第1リング状センサと、
互いに並列に接続された複数の第2光センサ素子を有し、且つ複数の前記第2光センサ素子が円環状に配置される第2リング状センサと、
前記第1リング状センサと前記第2リング状センサとを、前記第1光センサ素子と前記第2光センサ素子とが互いに90度の角度をなし、且つ前記第1光センサ素子が前記第2光センサ素子よりも上に位置するように固定する基台と、
前記基台に固定された状態の前記第1リング状センサ及び前記第2リング状センサから出力された電圧を演算処理し、方位角及び仰角のうち少なくとも一方に基づいて前記被案内者の手の位置を検知する検知処理部と、を備える近接覚センサを有することを特徴とする。
このような構成であれば、二つのリング状センサに対する被案内者の手の位置を、二つのリング状センサを基準とした方位角及び仰角のうち少なくとも一方に基づいて検知することが可能となるため、把持部に対する被案内者の手の位置を検出することが可能となる。
【発明の効果】
【0014】
以上説明したように、発明1の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように相対移動させることが可能となるため、基体の傾斜を抑制することが可能となる。
また、発明2の車輪型ロボットによれば、車輪型ロボットの進行方向に段差等が存在していても、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となるため、車輪の脱輪を抑制することが可能となる。
【0015】
また、発明3の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように相対移動させることが可能となるため、基体の傾斜を抑制することが可能となる。これに加え、車輪型ロボットの進行方向に段差等が存在していても、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となるため、車輪の脱輪及びそれに伴う基体の転倒を抑制することが可能となる。
【0016】
また、発明4の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、車輪型ロボットの重心の変位を抑制するとともに、基体の傾斜を抑制することが可能となる。
また、発明5の車輪型ロボットによれば、走行用モータ駆動制御部が、路車間距離が許容距離を超えていると誤判定することを、防止することが可能となるため、車輪型ロボットの誤動作発生を抑制することが可能となる。
また、発明6の車輪型ロボットによれば、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部を路面と接触させることが可能となるため、車輪型ロボットのうち、少なくとも滑落抑制部を除く部分の損傷を防止することが可能となる。
【0017】
また、発明7の車輪型ロボットによれば、被案内者の手が把持部から離れていても、移動部の位置を変化させず、被案内者の手の下方へ把持部が移動するように、移動部に対して把持部の位置を変化させることが可能となるため、被案内者が把持部を把持するために手を移動させる距離を短縮することが可能となる。
また、発明8の車輪型ロボットによれば、二つのリング状センサを基準とした方位角及び仰角のうち少なくとも一方に基づいて、把持部に対する被案内者の手の位置を検出することが可能となるため、被案内者の手の下方へ把持部を移動させる際に行なう制御の精度を向上させることが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明の第一実施形態の車輪型ロボットの構成を示す図である。
【図2】車輪型ロボットから、ベースカバー部材及びタワーカバー部材を外した状態を示す図である。
【図3】図2のIII線矢視図である。
【図4】基体ベース部及び移動部からベースカバー部材を外した状態を上面から見た斜視図である。
【図5】図1のV線矢視図である。
【図6】移動部の側面図であり、ベースカバー部材を取り外した状態を示す図である。
【図7】図1のVII線矢視図である。
【図8】路車間距離検出部が、路車間距離検出部と路面との距離を検出する状態を示す概略図である。
【図9】車輪型ロボットの走行時において、従動輪または駆動輪が脱輪した状態を示す概略図である。
【図10】ロールピッチ機構の構成を示す図である。
【図11】ロール側駆動部の構成を示す図である。
【図12】ロール側駆動部の作動時における、ロール側案内機構の動作状態を示す図である。
【図13】ピッチ側駆動部の作動時における、ピッチ側案内機構の動作状態を示す図である。
【図14】動作制御部の詳細な構成を示すブロック図である。
【図15】路車間距離検出部と路面との位置関係を示す図である。
【図16】路車間距離検出部と路面との位置関係を示す図である。
【図17】路車間距離検出部と路面との位置関係を示す図である。
【図18】上り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図19】下り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図20】車輪型ロボットの左側から右側への上り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図21】車輪型ロボットの左側から右側への下り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図22】車輪型ロボットの走行時において、従動輪が脱輪した後に滑落を抑制する状態を示す概略図である。
【図23】本発明の第二実施形態の車輪型ロボットが備える把持部の構成を示す図である。
【図24】図23中に示した近接覚センサが被案内者の手を検知する際の座標と、この座標が求められる原理とを説明するための図である。
【図25】第1リング状センサの回路構成を説明するための図である。
【図26】第1リング状センサ及び第2リング状センサを基台に取り付けた状態を示す模式図である。
【図27】図26に示したx座標と実際の方位角φとの対応を示した表である。
【図28】動作制御部の詳細な構成を示すブロック図である。
【発明を実施するための形態】
【0019】
(第一実施形態)
以下、本発明の第一実施形態(以下、「本実施形態」と記載する)について、図面を参照しつつ説明する。
(構成)
まず、図1から図17を用いて、本実施形態の車輪型ロボット1の構成を説明する。
図1は、本実施形態の車輪型ロボット1の構成を示す図であり、車輪型ロボット1の側面図である。
図1中に示すように、本実施形態の車輪型ロボット1は、基体2と、移動部4を備えている。また、車輪型ロボット1は、後述するロールピッチ機構6(図2参照)を備えている。
【0020】
(基体2の構成)
以下、図1を参照しつつ、図2から図5を用いて、基体2の構成を説明する。
基体2は、基体ベース部8と、基体タワー部10を備えている。
(基体ベース部8の構成)
基体ベース部8は、ベースカバー部材12を備えている。
ベースカバー部材12は、上面視で略五角形をなしており、上面及び下面が開口した筒状体により形成されている。なお、ベースカバー部材12の形状は、これに限定するものではなく、例えば、上面視で、円形や、五角形以外の多角形をなす形状に形成してもよい。
【0021】
また、ベースカバー部材12の内部には、図2及び図3中に示すように、ベース部上側プレート14と、ベース部下側プレート16が配置されている。なお、図2は、車輪型ロボット1から、ベースカバー部材12及び後述するタワーカバー部材18を外した状態を示す図であり、車輪型ロボット1の側面図である。また、図3は、図2のIII線矢視図であり、車輪型ロボット1の正面図である。
【0022】
ベース部上側プレート14は、ベースカバー部材12の上面を閉塞する板状部材であり、その下面(図1中における下側の面)には、第一距離センサ20が取り付けられている。
第一距離センサ20の取り付け位置は、具体的に、ベース部上側プレート14の下面のうち、車輪型ロボット1の幅方向(図3中における左右方向)の中心付近であるとともに、ベース部上側プレート14の先端側(図1中では、左側の端部側)である。
【0023】
第一距離センサ20は、例えば、レーザレンジセンサを用いて形成されており、車輪型ロボット1の前進方向(図1中では、左方向)に対し、第一距離センサ20と対象物(障害物等)との距離を検出可能なセンサである。また、第一距離センサ20は、第一距離センサ20と対象物との距離を検出すると、この検出した距離を含む情報信号を、後述する動作制御部22へ出力する。なお、第一距離センサ20が対象物との距離を検出可能な範囲は、例えば、車輪型ロボット1の上面視において、第一距離センサ20から前方へ延在する線を基準として、左右へ約135[°]の範囲である。
【0024】
ベース部下側プレート16は、ベースカバー部材12の内部において、ベース部上側プレート14の下方に配置されており、上下方向に延在する柱状のプレート連結部材24を複数個用いて、ベース部上側プレート14と連結されている。なお、ベース部下側プレート16とベース部上側プレート14は、対向する面同士が平行となっている。
また、ベース部下側プレート16の上面(ベース部上側プレート14と対向する面)には、三軸角度検出部26と、動作制御部22が取り付けられている。
【0025】
三軸角度検出部26は、三軸角度検出部26を交点として互いに直交する三軸の軸回りの加速度(と磁力)を検出可能な三軸センサを用いて形成されており、図4中に示すように、ベース部下側プレート16のうち、車輪型ロボット1の幅方向の中心付近に配置されている。また、三軸角度検出部26は、三軸のうち少なくとも一軸の軸回りの加速度(と磁力)を検出すると、この検出した加速度(と磁力)を含む情報信号を、動作制御部22へ出力する。なお、図4は、基体ベース部8及び移動部4からベースカバー部材12を外した状態を上面から見た斜視図である。
【0026】
本実施形態では、三軸角度検出部26が軸回りの加速度(と磁力)を検出可能な三軸を、車輪型ロボット1の前後方向(図1中における左右方向)に延在する軸(以降の説明では、「x軸」と記載する場合がある)と、車輪型ロボット1の幅方向に延在する軸(以降の説明では、「y軸」と記載する場合がある)と、車輪型ロボット1の上下方向(図1中における上下方向)に延在する軸(以降の説明では、「z軸」と記載する場合がある)とする場合を説明する。
動作制御部22は、CPU(Central Processing Unit)等を用いて形成されており、ベース部下側プレート16のうち、車輪型ロボット1の幅方向の中心付近において、三軸角度検出部26よりも右(図3中における左方向)に配置されている。なお、動作制御部22の詳細な構成は、後述する。
【0027】
(基体タワー部10の構成)
基体タワー部10は、タワーカバー部材18を備えている。
タワーカバー部材18は、柱状部18aと、水平部18bを備えている。
柱状部18aは、中空の角柱状に形成されており、その下端側は、ベース部上側プレート14の上面(図1中における上側の面)において、車輪型ロボット1の前進方向(図1中では、左方向)へオフセットして取り付けられている。また、柱状部18aの軸方向(長手方向)は、鉛直線に対して、車輪型ロボット1の後退方向(図1中では、右方向)へ傾斜している。
【0028】
水平部18bは、柱状部18aの上端側と連続しており、柱状部18aと同様、中空の角柱状に形成されている。また、水平部18bの軸方向(長手方向)は、ベース部下側プレート16及びベース部上側プレート14の面と平行または略平行となっている。
また、タワーカバー部材18の内部には、図2及び図3中に示すように、タワーフレーム部28と、グリップ支持部30が配置されている。
【0029】
タワーフレーム部28は、柱状部18aの内部に配置されており、ベース部上側プレート14の上面に取り付けられているタワー部ブラケット28aと、このタワー部ブラケット28aに取り付けられている複数本のタワー部支柱28bを備えている。
タワー部ブラケット28aの下部には、情報提供部38が配置されている。
情報提供部38は、例えば、音声を出力可能なスピーカを用いて形成されており、車輪型ロボット1を使用する被案内者に対して、案内に必要な音声情報等を提供する。なお、情報提供部38が出力する音声は、例えば、車輪型ロボット1の使用状況等に応じて、動作制御部22により設定される。
【0030】
また、タワーフレーム部28の上端側には、第二距離センサ32と、前方撮影用カメラ34が取り付けられている。
第二距離センサ32は、例えば、レーザレンジセンサを用いて形成されており、柱状部18aから車輪型ロボット1の後退方向へ突出している。
また、第二距離センサ32は、下方に対し、第二距離センサ32と車輪型ロボット1の走行面(路面)との距離(上下方向の距離)を検出可能なセンサである。そして、第二距離センサ32は、第二距離センサ32と障害物等との距離を検出すると、この検出した距離を含む情報信号を、動作制御部22へ出力する。なお、第二距離センサ32が走行面との距離を検出可能な範囲は、例えば、車輪型ロボット1を前後方向から見て、第二距離センサ32から鉛直方向下方へ延在する線を基準として、左右へ約120[°]の範囲である。
【0031】
前方撮影用カメラ34は、例えば、CCD(Charge Coupled Device)カメラを用いて形成されており、鉛直線に対し、柱状部18aの傾斜度合いと略平行に傾斜した状態で、柱状部18aから車輪型ロボット1の前進方向へ突出している。
また、前方撮影用カメラ34は、車輪型ロボット1の前方を撮像可能なカメラである。そして、前方撮影用カメラ34は、車輪型ロボット1の前方の映像を撮像すると、この検出した撮像を含む情報信号を、動作制御部22へ出力する。なお、前方撮影用カメラ34が撮像可能な範囲は、例えば、前方撮影用カメラ34の撮像方向の中心線から約60[°]の円形の範囲である。
【0032】
グリップ支持部30は、水平部18bの内部に配置された板状部材であり、タワーフレーム部28の上端側に取り付けられている取り付け部30aと、この取り付け部から車輪型ロボット1の後退方向へ延在する延在部30bを備えている。
取り付け部30aの上面には、第三距離センサ36が取り付けられている。
第三距離センサ36は、例えば、レーザレンジセンサを用いて形成されており、車輪型ロボット1の前進方向(図1中では、左方向)に対し、第三距離センサ36と対象物(障害物等)との距離を検出可能なセンサである。また、第三距離センサ36は、第三距離センサ36と対象物との距離を検出すると、この検出した距離を含む情報信号を、後述する動作制御部22へ出力する。なお、第三距離センサ36が対象物との距離を検出可能な範囲は、例えば、車輪型ロボット1の上面視において、第三距離センサ36から前方へ延在する線を基準として、左右へ約135[°]の範囲であるとともに、車輪型ロボット1の側面視において、第三距離センサ36から前方へ延在する線を基準として上へ約15[°]、下へ約60[°]の範囲である。
【0033】
なお、第三距離センサ36は、レーザレンジセンサに限定するものではなく、例えば、赤外線センサや超音波センサ等を用いて形成してもよい。これは、第一距離センサ20及び第二距離センサ32に関しても、同様である。
延在部30bは、側面視でベース部上側プレート14と平行となっている。
延在部30bの上面には、把持部40が配置されている。
【0034】
(把持部40の構成)
把持部40は、車輪型ロボット1を使用する被案内者が、車輪型ロボット1の使用時に手で把持する部分であり、入力値検出部42を介して、延在部30bの上面に取り付けられている。すなわち、把持部40は、基体2に取り付けられている。
また、把持部40は、上面視で、直径が100[mm]程度の略円形であるとともに、側面視で、厚さが30[mm]程度の略楕円形に形成されている。把持部40の下面側には、図示しない突起部分が形成されており、この突起部分を介して、把持部40は入力値検出部42に取り付けられている。
【0035】
また、把持部40の外径面のうち、車輪型ロボット1の前進方向及び側方には、図5中に示すように、把持部40の上面から下面へ連続する凹部44が、複数個所設けられている。なお、図5は、図1のV線矢視図であり、把持部40を上方から見た斜視図である。
凹部44は、片手の指よりも多く設ける。本実施形態では、一例として、凹部44を10箇所設ける場合を説明する。
凹部44の深さは、例えば、6[mm]程度に設定されている。また、隣り合う凹部44同士の間隔は、例えば、22[mm]程度に設定されている。これらの値は、被案内者の指の太さに応じて、被案内者の指のうち、第一関節及びその周辺が凹部44に合致しやすい値として設定する。
【0036】
なお、本実施形態では、一例として、把持部40に、図示しない移動モード切り換え操作部が設けられている場合を説明する。
移動モード切り換え操作部は、例えば、ボタンにより形成する。そして、被案内者によるボタン操作により、車輪型ロボット1を目的地まで移動させる案内移動モードと、車輪型ロボット1を把持部40への入力に応じた方向へ移動させる自由移動モードに切り換える。
【0037】
(入力値検出部42の構成)
入力値検出部42は、延在部30bの上面のうち、情報提供部38よりも車輪型ロボット1の後退方向側に取り付けられている。
また、入力値検出部42は、例えば、入力値検出部42を交点として互いに直交する三軸の軸方向に付与される力と、三軸の軸回りのモーメントを検出可能な六軸力センサを用いて形成されている。また、入力値検出部42は、三軸のうち少なくとも一軸の軸方向に付与される力や、三軸のうち少なくとも一軸の軸回りのモーメントを検出すると、この検出した力やモーメントを含む情報信号を、動作制御部22へ出力する。
本実施形態では、入力値検出部42が軸方向に付与される力及び軸回りのモーメントを検出可能な三軸を、上述した「x軸」、「y軸」及び「z軸」とする場合を説明する。
【0038】
(移動部4の構成)
以下、図1から図5を参照しつつ、図6及び図7を用いて、移動部4の詳細な構成を説明する。
移動部4は、基体2の下方に配置されて基体2を下方から支持しており、被案内者による把持部40への入力に応じて、基体2を移動させる。
また、移動部4は、移動部プレート46と、駆動輪48と、従動輪50と、走行用モータ52と、路車間距離検出部54と、滑落抑制部56を備えている。
【0039】
(移動部プレート46の構成)
移動部プレート46は、上面視でベースカバー部材12と重なる板状部材であり、ベースカバー部材12の内部において、ベース部下側プレート16の下方に配置されている。
また、移動部プレート46とベース部上側プレート14は、製造時等、車輪型ロボット1を水平面上に配置した状態で、対向する面同士が平行となっている。
【0040】
(駆動輪48の構成)
駆動輪48は、走行用モータ52が発生する駆動力により回転して基体2を移動させる車輪であり、駆動輪用ブラケット58を介して、移動部プレート46よりも下方へ突出した状態で、移動部プレート46に取り付けられている。
また、駆動輪48は、車輪型ロボット1を前後方向から見て、移動部プレート46の中心よりも左側に配置された左側駆動輪48Lと、移動部プレート46の中心よりも右側に配置された右側駆動輪48Rから形成されている。
【0041】
(従動輪50の構成)
従動輪50は、キャスタ等、上述した「z軸」回りに回動可能な回動部材60を介して、移動部プレート46よりも下方へ突出した状態で、移動部プレート46の下面(図1中における下方向の面)に取り付けられている。なお、従動輪50の外径(タイヤ径)は、駆動輪48の外径と同一または略同一とする。
また、従動輪50は、移動部プレート46の下面において、車輪型ロボット1の幅方向の中心付近であるとともに、駆動輪48よりも車輪型ロボット1の前進方向側に配置されている。
【0042】
なお、移動部プレート46のうち、下面に回動部材60を取り付けている部分は、駆動輪用ブラケット58を取り付けている部分よりも、基体2に近接している。そして、移動部プレート46のうち下面に回動部材60を取り付けている部分は、上下方向に延在する部分を介して、駆動輪用ブラケット58を取り付けている部分と連続して形成されている。
以上により、車輪型ロボット1は、車輪型ロボット1を支持する複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)を備えている。
【0043】
(走行用モータ52の構成)
走行用モータ52は、駆動輪48を回転駆動可能なモータで形成されており、動作制御部22が出力する指令信号に基づいて駆動して、被案内者による把持部40への入力に応じて基体2が移動するように、駆動輪48を駆動させる。また、走行用モータ52が発生させた駆動力は、図示しない駆動用プーリ等を介して、駆動輪48に伝達される。
また、走行用モータ52は、左側駆動輪48Lと右側駆動輪48Rに対し、それぞれ、個別に設けられている。すなわち、本実施形態の車輪型ロボット1は、二つの走行用モータ52を備えている。
【0044】
また、走行用モータ52は、無励磁作動型ブレーキの作動機構を有している。
無励磁作動型ブレーキは、後述するPSDセンサの検出値によって、電流(界磁電流)の供給を停止する回路により作動する機構であり、作動状態において、駆動輪48へ制動力を付与する機構である。このため、動作制御部22に不具合があった場合でも、走行用モータ52を停止させて、輪型案内用ロボット1の移動を止めることが可能である。
【0045】
(路車間距離検出部54の構成)
路車間距離検出部54は、例えば、PSD(Position Sensitive Detector)センサを用いて形成されており、移動部プレート46の下面に取り付けられている。
また、路車間距離検出部54は、予め設定した方向に対し、駆動輪48が走行する走行路の路面と路車間距離検出部54との距離を検出して、駆動輪48が走行する走行路の路面と基体2との距離である路車間距離を検出可能なセンサである。また、路車間距離検出部54は、路車間距離を検出すると、この検出した路車間距離を含む情報信号を、PSDセンサ用回路(図示せず)へ出力する。
【0046】
路車間距離検出部54が、路車間距離を検出する方向は、図6中に示すように、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とする。なお、図6は、移動部4の側面図であり、ベースカバー部材12を取り外した状態を示す図である。
すなわち、本実施形態では、路車間距離検出部54は、車輪型ロボット1の前方のみに対し、路車間距離を検出する。これは、一般的に、車輪型ロボット1は、後退走行の割合が前進走行と比較して非常に少なく、また、後退走行を行う際には、前進走行を行った経路を戻るため、車輪型ロボット1の後方に対して、路車間距離を検出する必要性が少ないためである。
【0047】
また、路車間距離検出部54は、図7中に示すように、移動部プレート46の下面において、複数個所に取り付けられている。なお、図7は、図1のVII線矢視図であり、移動部プレート46の下面を示す図である。
本実施形態では、一例として、移動部プレート46の下面において、五箇所に路車間距離検出部54を取り付けた場合を説明する。したがって、本実施形態の車輪型ロボット1は、五個の路車間距離検出部54を備えている。
【0048】
五個の路車間距離検出部54のうち一つは、従動輪50よりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、従動輪50よりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54a」と記載する。
また、五個の路車間距離検出部54のうち二つは、車輪型ロボット1を後方から見て、従動輪50の左側及び右側に配置されている。なお、図7中及び以降の説明では、従動輪50の左側に配置されている路車間距離検出部54を、「路車間距離検出部54b」と記載し、従動輪50の右側に配置されている路車間距離検出部54を、「路車間距離検出部54c」と記載する。
【0049】
また、五個の路車間距離検出部54のうち残りの二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54d」と記載し、右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54e」と記載する。
【0050】
以下、図1から図7を参照しつつ、図8を用いて、五個の路車間距離検出部54a〜54eが、路車間距離を検出する状態(a〜g)について説明する。なお、図8は、路車間距離検出部54が、路車間距離を検出する状態を示す概略図であり、車輪型ロボット1を上方から俯瞰で見た図である。
a.車輪型ロボット1の前進走行(直進)中に、前方に段差が存在している場合、図8(a)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
【0051】
b.車輪型ロボット1の前進走行(直進)中に、左側駆動輪48Lの前方に段差が存在している場合、図8(b)中に示すように、路車間距離検出部54dが、左側駆動輪48Lの前方に存在している段差に対し、路車間距離を検出する。
c.車輪型ロボット1の前進走行(直進)中に、右側駆動輪48Rの前方に段差が存在している場合、図8(c)中に示すように、路車間距離検出部54eが、右側駆動輪48Rの前方に存在している段差に対し、路車間距離を検出する。
【0052】
d.車輪型ロボット1の左旋回走行中に、左側に段差が存在している場合、図8(d)中に示すように、路車間距離検出部54bが、車輪型ロボット1の左側に存在している段差に対し、路車間距離を検出する。
e.車輪型ロボット1の右旋回走行中に、右側に段差が存在している場合、図8(e)中に示すように、路車間距離検出部54cが、車輪型ロボット1の右側に存在している段差に対し、路車間距離を検出する。
【0053】
f.車輪型ロボット1の前進走行(直進)中に、前方に駆動輪48及び従動輪50が脱落しない幅であり、車輪型ロボット1の前進走行に対して垂直または略垂直に延在する溝62が存在している場合、図8(f)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
g.車輪型ロボット1の前進走行(直進)中に、前方に駆動輪48及び従動輪50が脱落しない幅であり、車輪型ロボット1の前進走行に対して傾斜して延在する溝62が存在している場合、図8(g)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
【0054】
(滑落抑制部56の構成)
滑落抑制部56は、滑落抑制板64と、抑制板取付け部66を備えており、移動部プレート46の下面に取り付けられている。
滑落抑制板64は、板状部材であり、移動部プレート46の下方に配置されている。なお、滑落抑制板64と移動部プレート46は、対向する面同士が平行となっている。
【0055】
また、滑落抑制板64の下面(移動部プレート46と対向する面と反対側の面)には、ゴム等の弾性材料を用いて形成された板状の滑り止め部材68が、接着剤等を用いて取り付けられている。なお、滑り止め部材68の表面(移動部プレート46と対向する面と反対側の面)には、例えば、格子状に複数本の溝を形成してもよい。
抑制板取付け部66は、移動部プレート46の下面から下方へ向けて延在する柱状部材であり、移動部プレート46の下面と滑落抑制板64の上面とを連結して、滑落抑制板64を移動部プレート46に連結している。
【0056】
抑制板取付け部66の長さは、滑落抑制板64の、移動部プレート46の下面からの突出度合いが、駆動輪48及び従動輪50の、移動部プレート46の下面からの突出度合い未満となる長さに設定する。
したがって、滑落抑制部56は、移動部プレート46の下面から突出した状態で、移動部プレート46の下面に取り付けられている。また、滑落抑制部56は、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)が路面に接地している状態で、路面よりも上方に配置されている。
【0057】
また、滑落抑制部56は、図7中に示すように、移動部プレート46の下面において、複数個所に取り付けられている。
本実施形態では、一例として、移動部プレート46の下面において、七箇所に滑落抑制部56を取り付けた場合を説明する。したがって、本実施形態の車輪型ロボット1は、七個の滑落抑制部56を備えている。
【0058】
七個の滑落抑制部56のうち二つは、車輪型ロボット1を後方から見て、従動輪50の左側及び右側に配置されている。なお、図7中及び以降の説明では、従動輪50の左側に配置されている滑落抑制部56を、「滑落抑制部56a」と記載し、従動輪50の右側に配置されている滑落抑制部56を、「滑落抑制部56b」と記載する。
また、七個の滑落抑制部56のうち一つは、従動輪50よりも車輪型ロボット1の後方に配置されている。なお、図7中及び以降の説明では、従動輪50よりも車輪型ロボット1の後方に配置されている滑落抑制部56を、「滑落抑制部56c」と記載する。
【0059】
また、七個の滑落抑制部56のうち二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の前方に配置されている滑落抑制部56を、「滑落抑制部56d」と記載し、右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている滑落抑制部56を、「滑落抑制部56e」と記載する。
また、七個の滑落抑制部56のうち残りの二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の中心側に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の中心側に配置されている滑落抑制部56を、「滑落抑制部56f」と記載し、右側駆動輪48Rよりも車輪型ロボット1の中心側に配置されている滑落抑制部56を、「滑落抑制部56g」と記載する。
【0060】
以下、図1から図7を参照しつつ、図9を用いて、七個の滑落抑制部56a〜56gと従動輪50及び駆動輪48により、段差が存在している面で脱輪した車輪型ロボット1の滑落を抑制する状態(a〜k)について説明する。なお、図9は、車輪型ロボット1の走行時において、従動輪50または駆動輪48が脱輪した状態を示す概略図であり、車輪型ロボット1を上方から俯瞰で見た図である。
【0061】
a.車輪型ロボット1の前進走行(直進)中に、前方に存在している段差(図8(a)参照、以下の説明でも同様)に従動輪50が脱輪した場合、図9(a)中に示すように、滑落抑制部56cが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56cと、左側駆動輪48L及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
b.車輪型ロボット1の右旋回走行中に、右側に存在している段差に従動輪50が脱輪した場合、車輪型ロボット1の走行面から左側駆動輪48Lが離れた状態で、図9(b)中に示すように、滑落抑制部56a及び滑落抑制部56eが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56a及び滑落抑制部56eと、右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
【0062】
c.車輪型ロボット1の左旋回走行中に、左側に存在している段差に従動輪50が脱輪した場合、車輪型ロボット1の走行面から右側駆動輪48Rが離れた状態で、図9(c)中に示すように、滑落抑制部56b及び滑落抑制部56dが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56b及び滑落抑制部56dと、左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
d.車輪型ロボット1の前進走行(直進)中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(d)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0063】
e.車輪型ロボット1の前進走行(直進)中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(e)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
f.車輪型ロボット1の後退走行(直進)中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(f)中に示すように、滑落抑制部56eが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56eと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0064】
g.車輪型ロボット1の後退走行(直進)中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(g)中に示すように、滑落抑制部56dが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56dと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
h.車輪型ロボット1の右旋回走行中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(h)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
【0065】
i.車輪型ロボット1の右旋回走行中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(i)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
j.車輪型ロボット1の左旋回走行中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(j)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0066】
k.車輪型ロボット1の左旋回走行中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(k)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
以上により、移動部プレート46の下面において、七個の滑落抑制部56a〜56gを取り付ける位置は、車輪型ロボット1の形状・重心や、従動輪50及び駆動輪48の位置・形状等に応じて、上述したように、脱輪した車輪型ロボット1の滑落を抑制可能な位置に設定する。
【0067】
同様に、滑落抑制板64の、移動部プレート46の下面からの突出度合いは、車輪型ロボット1の形状・重心や、従動輪50及び駆動輪48の位置・形状等に応じて、上述したように、脱輪した車輪型ロボット1の滑落を抑制可能な位置に設定する。
したがって、滑落抑制部56は、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)のうち少なくとも一つを除く車輪が路面から脱輪した状態で、路面と接触する位置・形状に設定する。
【0068】
(ロールピッチ機構6の構成)
以下、図1から図9を参照しつつ、図10から図13を用いて、ロールピッチ機構6の詳細な構成を説明する。
ロールピッチ機構6は、基体2と移動部4との間に配置されており、基体2と移動部4とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結している。
ここで、ロールピッチ機構6が基体2と移動部4とを相対移動可能に連結する二つの軸は、上述した「x軸」と「y軸」である。
【0069】
また、本実施形態では、ロールピッチ機構6の構成を、一例として、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成とした場合を説明する。なお、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成としては、例えば、(株)日本ベアリング製の「ゴニオウェイ」を二つ用いる。
具体的には、ロールピッチ機構6は、図10中に示すように、ロール側案内機構70と、ピッチ側案内機構72を備えている。なお、図10は、ロールピッチ機構6の構成を示す図であり、図10(a)は、ロールピッチ機構6の上面図、図10(b)は、図10(a)のB線矢視図であり、図10(c)は、図10(a)のC線矢視図、図10(d)は、ロールピッチ機構6を上方から見た斜視図である。
【0070】
(ロール側案内機構70の構成)
ロール側案内機構70は、ロール側ベース軌道台74と、ロール側テーブル軌道台76を備えており、ロール側駆動部78が発生させる駆動力により駆動する。なお、ロール側駆動部78の説明は、後述する。
ロール側ベース軌道台74は、断面が凹部状となるように形成されており、その底面が、図示しないボルト等を用いて、移動部プレート46の上面(図1中における上方向の面)に取り付けられている。
【0071】
また、ロール側ベース軌道台74のうち、底面を挟む二つの壁を形成する部分には、それぞれ、車輪型ロボット1の幅方向に沿って連続するとともに、互いに対向するロール側ベース転走面80が形成されている。
ロール側ベース転走面80は、側面視で、長さ方向の中心部が最も基体2側(上方)に近く、端部へ向かうにつれて基体2から離れるように傾斜する曲線状に形成されている。また、ロール側ベース転走面80は、ロール側ベース転走面80の長さ方向から見たV溝で形成されている。
【0072】
ロール側テーブル軌道台76は、断面が下方へ突出する凸部状となるように形成されており、突出部分がロール側ベース軌道台74と嵌合した状態で、ロール側ベース軌道台74の上方(基体2側)に配置されている。
また、ロール側テーブル軌道台76の突出部分には、ロール側ベース転走面80と対向するロール側テーブル転走面82が形成されている。また、ロール側テーブル転走面82は、ロール側ベース転走面80と同様、ロール側テーブル転走面82の長さ方向から見たV溝で形成されている。
【0073】
また、ロール側テーブル軌道台76のうち、車輪型ロボット1を前進方向から見た右側の面には、後述するロール側接続環84内に挿通させるロール側接続ピン86が取り付けられている。
ロール側接続ピン86は、円柱状に形成されており、ロール側テーブル軌道台76から、車輪型ロボット1を前進方向から見た右側へ突出している。
ロール側ベース転走面80とロール側テーブル転走面82との間には、図示しない複数の転動体(ボール)と、隣り合う転動体間の距離を維持する保持器(図示せず)が介装されている。
【0074】
(ピッチ側案内機構72の構成)
ピッチ側案内機構72は、ピッチ側ベース軌道台88と、ピッチ側テーブル軌道台90を備えており、ピッチ側駆動部92が発生させる駆動力により駆動する。なお、ピッチ側駆動部92の説明は、後述する。
ピッチ側ベース軌道台88は、ロール側ベース軌道台74と同様、断面が凹部状となるように形成されており、その底面が、図示しないボルト等を用いて、ロール側テーブル軌道台76の上面(図1中における上方向の面)に取り付けられている。
【0075】
また、ピッチ側ベース軌道台88のうち、底面を挟む二つの壁を形成する部分には、それぞれ、車輪型ロボット1の前後方向に沿って連続するとともに、互いに対向するピッチ側ベース転走面94が形成されている。
ピッチ側ベース転走面94は、側面視で、長さ方向の中心部が最も基体2側(上方)に近く、端部へ向かうにつれて基体2から離れるように傾斜する曲線状に形成されている。また、ピッチ側ベース転走面94は、ピッチ側ベース転走面94の長さ方向から見たV溝で形成されている。なお、ピッチ側ベース転走面94の曲率は、ロール側ベース転走面80の曲率と同一に設定する。
【0076】
また、ピッチ側ベース軌道台88のうち、車輪型ロボット1を前進方向から見た左側の面には、後述するピッチ側接続環内に挿通させるピッチ側接続ピン96が取り付けられている。
ピッチ側接続ピン96は、円柱状に形成されており、ピッチ側テーブル軌道台90から、車輪型ロボット1を前進方向から見た左側において、下方へ突出している。
ピッチ側テーブル軌道台90は、ロール側テーブル軌道台76と同様、断面が下方へ突出する凸部状となるように形成されており、突出部分がピッチ側ベース軌道台88と嵌合した状態で、ピッチ側ベース軌道台88の上方(基体2側)に配置されている。
【0077】
また、ピッチ側テーブル軌道台90の突出部分には、ピッチ側ベース転走面94と対向するピッチ側テーブル転走面98が形成されている。また、ピッチ側テーブル転走面98は、ピッチ側ベース転走面94と同様、ピッチ側テーブル転走面98の長さ方向から見たV溝で形成されている。
ピッチ側ベース転走面94とピッチ側テーブル転走面98との間には、図示しない複数の転動体(ボール)と、隣り合う転動体間の距離を維持する保持器(図示せず)が介装されている。
【0078】
(ロール側駆動部78の構成)
ロール側駆動部78は、図11中に示すように、ロール側駆動モータ100と、ロール側直動案内機構102を備えている。なお、図11は、ロール側駆動部78の構成を示す図であり、図11(a)は、図2のXI矢視図、図11(b)は、図11(a)のB線矢視図、図11(c)は、図11(a)のC線矢視図である。
ロール側駆動モータ100は、ロール側直動案内機構102を回転駆動可能なモータで形成されており、動作制御部22が出力する指令信号に基づいて駆動する。
【0079】
また、ロール側駆動モータ100は、ベース部下側プレート16の下面とピッチ側テーブル軌道台90の上面とを連結する連結フレーム104に取り付けられている。なお、連結フレーム104は、上面視で略Y字型に形成されており、その一辺は、車輪型ロボット1の前後方向に向いている。
ロール側直動案内機構102は、例えば、ボールねじ等の直動案内装置を用いて形成されており、連結フレーム104に取り付けられている。本実施形態では、ロール側直動案内機構102を、ねじ軸とナットを備えたボールねじを用いて形成した場合を説明する。
【0080】
ロール側直動案内機構102が備えるねじ軸は、その軸方向を、車輪型ロボット1の幅方向に向けており、ロール側駆動モータ100が駆動力を発生させると、この駆動力がプーリ及びベルトを介して伝達されて回転する。また、ねじ軸の外径面には、螺旋状に形成されたねじ軸側転走溝が形成されている。
また、ロール側直動案内機構102が備えるナットは、その内径面が、ねじ軸の外径面と対向している。なお、以降の説明では、ねじ軸の径方向から見て、ナットの中心がねじ軸の中心と重なっている状態を、中立状態と記載する場合がある。
【0081】
ナットの内径面には、ねじ軸側転走溝と対向するナット側転走溝が形成されており、ナットの外径面には、ロール側接続ロッド106の一端が取り付けられている。
ロール側接続ロッド106は、柱状部材であり、その他端には、円環状に形成されたロール側接続環84が固定されている。
そして、ねじ軸側転走溝とナット側転走溝との間に形成される転動体転走路には、複数の転動体が配置されており、ねじ軸が回転すると、複数の転動体の転動を介して、ナットがねじ軸の軸方向へ移動する。
【0082】
ここで、ロール側直動案内機構102は、ナットの移動方向(ねじ軸の軸方向)を、車輪型ロボット1の幅方向に向けている。また、上述したように、ロール側接続環84内には、ロール側接続ピン86が挿通されている。
また、上述したように、ロール側ベース転走面80及びロール側テーブル転走面82は、車輪型ロボット1の幅方向に沿って連続している。
【0083】
したがって、ロール側駆動部78が作動して、ロール側直動案内機構102が備えるナットが車輪型ロボット1の幅方向へ移動すると、ロール側ベース軌道台74とロール側テーブル軌道台76は、複数の転動体の転動を介して、図12中に示すように、上述した「x軸」の軸回り方向へ、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。なお、図12は、ロール側駆動部78の作動時における、ロール側案内機構70の動作状態を示す図であり、図12(a)は、中立状態におけるロール側案内機構70の動作状態を示す図、図12(b)は、ナットが、中立状態から左側駆動輪48L側へ移動した状態における、ロール側案内機構70の動作状態を示す図、図12(c)は、ナットが、中立状態から右側駆動輪48R側へ移動した状態における、ロール側案内機構70の動作状態を示す図である。
【0084】
(ピッチ側駆動部92の構成)
ピッチ側駆動部92は、ピッチ側駆動モータ(図示せず)と、ピッチ側直動案内機構(図示せず)を備えている。
なお、ピッチ側駆動部92の構成は、ピッチ側駆動モータ及びピッチ側直動案内機構が、移動部プレート46の上面に取り付けられている点と、ピッチ側直動案内機構が備えるねじ軸の軸方向及びナットの移動方向を、車輪型ロボット1の前後方向に向けている点を除き、上述したロール側駆動部78と同様であるため、その説明を省略する。
【0085】
したがって、ピッチ側駆動モータが作動して、ピッチ側直動案内機構が備えるねじ軸が回転すると、複数の転動体の転動を介して、ピッチ側直動案内機構が備えるナットが、車輪型ロボット1の前後方向に移動する。
ここで、上述したように、ピッチ側ベース転走面94及びピッチ側テーブル転走面98は、車輪型ロボット1の前後方向に沿って連続している。また、ピッチ側接続環(図示せず)内には、ピッチ側接続ピン96が挿通されている。なお、ピッチ側接続環の構成は、ロール側接続環84と同様である。
【0086】
したがって、ピッチ側駆動部92が作動して、ピッチ側直動案内機構が備えるナットが車輪型ロボット1の前後方向へ移動すると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90は、複数の転動体の転動を介して、図13中に示すように、上述した「y軸」の軸回り方向へ、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。なお、図13は、ピッチ側駆動部92の作動時における、ピッチ側案内機構72の動作状態を示す図であり、図13(a)は、中立状態におけるピッチ側案内機構72の動作状態を示す図、図13(b)は、ナットが、中立状態から車輪型ロボット1の前進方向へ移動した状態における、ピッチ側案内機構72の動作状態を示す図、図13(c)は、ナットが、中立状態から車輪型ロボット1の後退方向へ移動した状態における、ピッチ側案内機構72の動作状態を示す図である。
【0087】
(動作制御部22の詳細な構成)
以下、図1から図13を参照しつつ、図14から図17を用いて、動作制御部22の詳細な構成を説明する。
動作制御部22は、図14中に示すように、提供情報生成部108と、走行用モータ駆動制御部110と、基体傾斜角検出部112と、ロールピッチ機構駆動制御部114を備えている。なお、図14は、動作制御部22の詳細な構成を示すブロック図である。
【0088】
・提供情報生成部108の構成
提供情報生成部108は、第一距離センサ20と、第二距離センサ32と、前方撮影用カメラ34と、第三距離センサ36と、入力値検出部42と、移動モード切り換え操作部から、情報信号の入力を受け、情報提供部38へ出力する指令信号を生成する。
情報提供部38へ出力する指令信号は、例えば、車輪型ロボット1の進行方向や周辺に障害物等が存在している内容を示す音声や、車輪型ロボット1を後退させる内容を示す音声や、従動輪50または駆動輪48が脱輪した内容を示す音声を出力するための指令信号である。また、車輪型ロボット1の移動モードが案内移動モードである場合では、車輪型ロボット1の移動を開始する内容を示す音声や、目的地へ到着した内容を示す音声や、左右へ大きく旋回する内容を示す音声である。
なお、車輪型ロボット1の進行方向や周辺に障害物等が存在している状態は、例えば、第一距離センサ20、第二距離センサ32、前方撮影用カメラ34、第三距離センサ36から入力された情報信号に基づいて検出する。
【0089】
・走行用モータ駆動制御部110の構成
走行用モータ駆動制御部110は、第一距離センサ20と、第二距離センサ32と、前方撮影用カメラ34と、第三距離センサ36と、入力値検出部42と、路車間距離検出部54から、情報信号の入力を受け、走行用モータ52へ出力する指令信号を生成する。
走行用モータ52へ出力する指令信号は、入力値検出部42が検出した、被案内者による把持部40への入力に応じて、車輪型ロボット1の移動方向(前進・後退・左右への旋回)や、移動速度の変化等を指示するための指令信号である。
【0090】
具体的には、被案内者が把持部40を前方へ傾斜させる動作を行った場合、入力値検出部42が検出した入力の大きさに応じて、走行用モータ52の回転数を変化させる。また、被案内者が把持部40を右側または左側へ傾斜させる動作を行った場合、入力値検出部42が検出した入力の大きさに応じて、左側駆動輪48Lを駆動させる走行用モータ52と、右側駆動輪48Rを駆動させる走行用モータ52の回転数や回転方向を、個別に変化させる。
【0091】
また、車輪型ロボット1の進行方向や周辺に障害物等が存在している状態を検出すると、検出した障害物等との接触を回避するように、走行用モータ52の回転数や回転方向を変化させる。
また、走行用モータ駆動制御部110は、路車間距離検出部54から入力された情報信号に含まれている路車間距離を参照し、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えているか否かを判定する。そして、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えていると判定すると、走行用モータ52の動作を停止させる指令信号を、走行用モータ52へ出力する。なお、許容距離Arは、予め設定し、走行用モータ駆動制御部110に記憶させておく。
【0092】
以上により、走行用モータ駆動制御部110は、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御する。
また、上述した無励磁作動型ブレーキも、同様の方法で、動作制御部22から独立した回路により、制御される。
【0093】
・許容距離の設定
以下、図1から図14を参照しつつ、図15及び図16を用いて、許容距離の設定について説明する。なお、図15及び図16は、路車間距離検出部54と路面との位置関係を示す図である。
許容距離は、駆動輪48及び従動輪50の外径等に基づき、駆動輪48及び従動輪50が脱落しない幅の溝が路面に存在している状態に応じて算出した増加距離に基づいて設定する。
【0094】
具体的には、図15中に示す、路面に、駆動輪48及び従動輪50が脱落しない幅の溝62が存在する場合における、路車間距離検出部54と溝62の内壁面との距離を、許容距離Arとして設定する。
これにより、例えば、図16(a)中に示すように、路面が、車輪型ロボット1が走行面と同一面である場合、路車間距離検出部54は、許容距離Arを超えていない路車間距離を検出する。
また、例えば、図16(b)中に示すように、車輪型ロボット1の周辺に段差等が存在して、路面が、車輪型ロボット1が走行している面よりも低い場合、路車間距離検出部54は、許容距離Arを超えている路車間距離を検出する。
【0095】
次に、図1から図16を参照しつつ、図17を用いて、路車間距離検出部54が路車間距離を検出する方向を、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とした理由を説明する。なお、図17は、路車間距離検出部54と路面との位置関係を示す図である。
図17中に示すように、路面に、駆動輪48及び従動輪50が脱落しない幅の溝62が存在する場合、路車間距離検出部54が路車間距離を検出する方向を真下に設定、すなわち、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ90[°]傾斜させた方向と設定すると、路車間距離検出部54は、溝62の底面を、路面として認識することとなる。このため、走行用モータ駆動制御部110は、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、路車間距離検出部54と溝62の底面との距離frが許容距離Arを超えていると判定することとなる。なお、図17中に示す溝62は、例えば、エレベータの乗降口に形成されている溝であり、駆動輪48及び従動輪50が脱落しない幅の溝である。
【0096】
これに対し、本実施形態のように、路車間距離検出部54が路車間距離を検出する方向を、上記の方向(45[°]傾斜させた方向)と設定することにより、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能となる。
【0097】
・基体傾斜角検出部112の構成
基体傾斜角検出部112は、予め、車輪型ロボット1を水平面上に載置した状態であり、ベース部下側プレート16と水平面が平行、すなわち、水平面に対するベース部下側プレート16の傾斜角度が「0[°]」である状態の、「x軸」の軸回りのモーメントと「y軸」の軸回りのモーメントを記憶させてある。
また、基体傾斜角検出部112は、三軸角度検出部26から情報信号の入力を受け、水平面を基準とした「x軸」の軸回りのモーメントを検出し、この検出した水平面に対する「x軸」の軸回りのモーメントの変化量を含む情報信号を、ロールピッチ機構駆動制御部114へ出力する。
【0098】
同様に、基体傾斜角検出部112は、三軸角度検出部26から情報信号の入力を受け、水平面を基準とした「y軸」の軸回りのモーメントを検出し、この検出した水平面に対する「y軸」の軸回りのモーメントの変化量を含む情報信号を、ロールピッチ機構駆動制御部114へ出力する。
以上により、基体傾斜角検出部112は、水平面に対する基体2の傾斜角度を検出する。
【0099】
・ロールピッチ機構駆動制御部114の構成
ロールピッチ機構駆動制御部114は、基体傾斜角検出部112から情報信号の入力を受け、ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号を生成する。
ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号は、基体傾斜角検出部112から入力された情報信号に基づき、水平面に対するベース部下側プレート16の傾斜角度を検出して生成する。
【0100】
具体的には、基体傾斜角検出部112から入力された情報信号に基づき、水平面に対する「x軸」及び「y軸」の軸回りのモーメントを検出して、水平面に対するベース部下側プレート16の傾斜角度を算出する。そして、算出したベース部下側プレート16の傾斜角度を、水平面に対する基体2の傾斜角度として参照し、水平面に対する基体2の傾斜角度が減少して、ベース部下側プレート16が水平面と平行になるような、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態(ナットの移動量)を算出する。
【0101】
さらに、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態を、ベース部下側プレート16が水平面と平行になるような動作状態とするために、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。そして、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
以上により、ロールピッチ機構駆動制御部114は、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78とピッチ側駆動部92の駆動状態を制御する。
【0102】
(動作)
以下、図1から図17を参照しつつ、図18から図22を用いて、本実施形態の車輪型ロボット1が行う動作について説明する。
車輪型ロボット1の使用時には、被案内者が、車輪型ロボット1の移動モードを、案内移動モードまたは自由移動モードに切り換え、把持部40を把持する。
このとき、走行用モータ駆動制御部110は、車輪型ロボット1の移動方向や移動速度が、被案内者による把持部40への入力に応じた値となるように、二つの走行用モータ52の回転数や回転方向を変化させる指令信号を生成して、走行用モータ52へ出力する。これにより、車輪型ロボット1は、被案内者による把持部40への入力に応じて走行(移動)する。
【0103】
・傾斜した路面の走行における動作
車輪型ロボット1が走行する路面(走行路)が傾斜した路面である場合、ロールピッチ機構駆動制御部114は、基体傾斜角検出部112から入力された情報信号に基づき、ベース部下側プレート16を水平面と平行にするための、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。さらに、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
【0104】
車輪型ロボット1が走行する路面が、上り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ピッチ側駆動モータ110を駆動させて、ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の前進方向へ移動させる(図13(b)参照)。
ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の前進方向へ移動させると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90は、複数の転動体の転動を介して、上述した「y軸」の軸回り方向へ、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。
【0105】
これにより、ピッチ側テーブル軌道台90に連結されている連結フレーム104を介して、ベース部下側プレート16が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って移動し、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図18中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、上り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図18は、上り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0106】
一方、車輪型ロボット1が走行する路面が、下り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ピッチ側駆動モータ110を駆動させて、ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の後退方向へ移動させる(図13(c)参照)。
ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の後退方向へ移動させると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。これにより、ベース部下側プレート16が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って移動して、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
【0107】
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図19中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、下り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図19は、下り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0108】
また、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ロール側駆動モータ100を駆動させて、ロール側直動案内機構102が備えるナットを、中立状態から左側駆動輪48L側へ移動させる(図12(b)参照)。
ロール側直動案内機構102が備えるナットを、中立状態から左側駆動輪48L側へ移動させると、ロール側ベース軌道台74とロール側テーブル軌道台76は、複数の転動体の転動を介して、上述した「x軸」の軸回り方向へ、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。
【0109】
これにより、ロール側テーブル軌道台76に連結されている連結フレーム104を介して、ベース部下側プレート16が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って移動し、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図20中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図20は、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0110】
一方、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ロール側駆動モータ100を駆動させて、ロール側直動案内機構102が備えるナットを、中立状態から右側駆動輪48R側へ移動させる(図12(c)参照)。
ロール側直動案内機構102が備えるナットを、中立状態から右側駆動輪48R側へ移動させると、ロール側ベース軌道台74とロール側テーブル軌道台76が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。これにより、ベース部下側プレート16が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って移動して、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
【0111】
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図21中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図21は、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0112】
・脱輪を防止する動作
車輪型ロボット1の走行中(移動中)には、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が許容距離Arを超えているか否かの判定を行う。そして、路車間距離が許容距離Arを超えていると判定すると、走行用モータ駆動制御部110は、走行用モータ52の動作を停止させる指令信号を生成し、走行用モータ52へ出力する。
動作を停止させる指令信号の入力を受けた走行用モータ52は、無励磁作動型ブレーキを作動させて、駆動輪48へ制動力を付与する。これにより、車輪型ロボット1の走行(移動)を停止させて、従動輪50や駆動輪48の脱輪を防止する。
【0113】
・脱輪時の動作
車輪型ロボット1の走行中に、従動輪50または駆動輪48が脱輪した場合、脱輪した車輪以外の車輪と滑落抑制部56により、車輪型ロボット1を支持して、滑落を抑制する。
なお、車輪型ロボット1の走行中に、従動輪50または駆動輪48が脱輪する状況とは、例えば、路車間距離検出部54の故障等により、路車間距離の検出が誤っている状況、走行用モータ52の故障等により、走行用モータ52の無励磁作動型ブレーキが正常に作動しなかった状況、走行用モータ52の無励磁作動型ブレーキが正常に作動したが、被案内者が車輪型ロボット1を押した状況等である。
【0114】
例えば、車輪型ロボット1の左旋回走行中に、左側に存在している段差に従動輪50が脱輪した場合、図22中に示すように、車輪型ロボット1の走行面から右側駆動輪48Rが離れた状態で、滑落抑制部56b及び滑落抑制部56dが、車輪型ロボット1の走行面と接触する。なお、図22は、車輪型ロボット1の走行時において、従動輪50が脱輪した後に滑落を抑制する状態を示す概略図であり、図22(a)は、車輪型ロボット1を上方から見た図、図22(b)は、図22(a)のB線矢視図、図22(c)は、図22(a)のC線矢視図である。
【0115】
これにより、移動部プレート46が走行面に接触していない状態で、左側駆動輪48Lと滑落抑制部56b及び滑落抑制部56dが走行面に接触することなり、車輪型ロボット1のうち、左側駆動輪48Lと滑落抑制部56b及び滑落抑制部56dを除く部分の損傷を防止するとともに、車輪型ロボット1を支持して、滑落を抑制する。
また、滑落抑制部56が備える滑落抑制板64の下面には、弾性材料を用いて形成された板状の滑り止め部材68が取り付けられているため、滑落抑制部56が走行面に接触すると、滑り止め部材68により、車輪型ロボット1の移動が抑制されて、滑落が抑制される。
なお、ロール側駆動部78とピッチ側駆動部92は、ロールピッチ機構6を駆動させるロールピッチ機構駆動部に対応している。
【0116】
(第一実施形態の効果)
以下、本実施形態の効果を列挙する。
(1)本実施形態の車輪型ロボット1では、ロールピッチ機構駆動制御部114が、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78及びピッチ側駆動部92の駆動状態を制御する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、水平面に対する基体2の傾斜角度が減少するように、平面視で直交する二つの軸回り方向である、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。
その結果、斜面の走行時において、基体2の傾斜を抑制することが可能となるため、被案内者が把持部40を把持することが困難な状況の発生を抑制することが可能となり、車輪型ロボット1の操作性を向上させることが可能となる。
【0117】
(2)本実施形態の車輪型ロボット1では、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように走行用モータ52の駆動状態を制御する。
このため、車輪型ロボット1の進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御することが可能となる。
その結果、車輪型ロボット1の進行方向に段差等が存在していても、車輪の脱輪時における基体2の転倒を抑制することが可能となるため、車輪型ロボット1の使用時における安全性を向上させることが可能となる。
【0118】
(3)本実施形態の車輪型ロボット1では、ロールピッチ機構駆動制御部114が、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78及びピッチ側駆動部92の駆動状態を制御する。これに加え、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように走行用モータ52の駆動状態を制御する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、水平面に対する基体2の傾斜角度が減少するように、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。これに加え、車輪型ロボット1の進行方向に存在する段差等に対して検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御することが可能となる。
【0119】
その結果、斜面の走行時において、基体2の傾斜を抑制することが可能となるため、被案内者が把持部40を把持することが困難な状況の発生を抑制することが可能となる。これに加え、車輪型ロボット1の進行方向に段差等が存在していても、車輪の脱輪時における基体2の転倒を抑制することが可能となる
これにより、車輪型ロボット1の操作性を向上させることが可能となるとともに、車輪型ロボット1の使用時における安全性を向上させることが可能となる。
【0120】
(4)本実施形態の車輪型ロボット1では、ロールピッチ機構6が、基体2と移動部4とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って、相対移動可能に連結する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、車輪型ロボット1の重心の変位を抑制するとともに、水平面に対する基体2の傾斜角度が減少するように、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。
その結果、斜面の走行時における、車輪型ロボット1の安定性を向上させることが可能となるため、斜面の走行時における車輪型ロボット1の安全性を向上させることが可能となる。
【0121】
(5)本実施形態の車輪型ロボット1では、路車間距離検出部54が路車間距離を検出する検出方向を、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とする。
このため、車輪が脱落せずに走行可能な溝等が、車輪型ロボット1の進行方向に存在している場合に、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能となる。
その結果、車輪が脱落せずに走行可能な溝等が、車輪型ロボット1の進行方向に存在している場合において、車輪型ロボット1の誤動作発生を抑制することが可能となるため、車輪型ロボット1の安定性を向上させることが可能となる。
【0122】
(6)本実施形態の車輪型ロボット1では、滑落抑制部56が、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)のうち少なくとも一つを除く車輪が路面から脱輪した状態で、路面と接触する。
このため、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部56を路面と接触させることが可能となる。
その結果、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、車輪型ロボット1のうち、少なくとも滑落抑制部56を除く部分の損傷を防止することが可能となる。
【0123】
(変形例)
以下、本実施形態の変形例を列挙する。
(1)本実施形態の車輪型ロボット1では、ロールピッチ機構6の構成を、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成としたが、ロールピッチ機構6の構成は、これに限定するものではない。すなわち、ロールピッチ機構6の構成を、例えば、ナットの移動方向を「x軸」に向けたボールねじと、ナットの移動方向を「y軸」に向けたボールねじと、ナットの移動方向を「z軸」に向けたボールねじを備える構成としてもよい。
【0124】
(2)本実施形態の車輪型ロボット1では、路車間距離検出部54が路車間距離を検出する方向を、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたが、路車間距離検出部54が路車間距離を検出する方向は、これに限定するものではない。すなわち、路車間距離検出部54が路車間距離を検出する方向を、例えば、路車間距離検出部54から前方へ水平に延在する線から下方へ60[°]から15[°]までの範囲内で任意に傾斜させた方向としてもよい。要は、路車間距離検出部54が路車間距離を検出する方向は、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能な方向であればよい。
【0125】
(3)本実施形態の車輪型ロボット1では、移動部プレート46の下面に、七個の滑落抑制部56a〜56gを取り付けたが、脱輪した車輪型ロボット1の滑落が抑制可能であれば、滑落抑制部56の個数・形状は限定するものではない。
(4)本実施形態の車輪型ロボット1では、路車間距離検出部54が、車輪型ロボット1の前方のみに対し、路車間距離を検出するが、路車間距離検出部54の構成は、これに限定するものではない。すなわち、路車間距離検出部54が、路車間距離を検出する方向は、車輪型ロボット1の前方に加え、車輪型ロボット1の後方や側方としてもよい。
(5)本実施形態の車輪型ロボット1では、三軸角度検出部26を、ベース部下側プレート16に取り付けたが、これに限定するものではなく、三軸角度検出部26を、移動部プレート46に取り付けてもよい。
【0126】
(第二実施形態)
以下、本発明の第二実施形態(以下、「本実施形態」と記載する)について、図面を参照しつつ説明する。
(構成)
まず、図1から図22を参照しつつ、図23から図28を用いて、本実施形態の車輪型ロボット1の構成を説明する。なお、図中及び以降の説明では、上述した第一実施形態と同様の構成について、同一の符合を付して示す。
本実施形態の車輪型ロボット1の構成は、動作制御部22と、把持部40の構成を除き、上述した第一実施形態と同様であるため、以降の説明は、動作制御部22及び把持部40を中心に行なう。また、以降の説明では、上述した第一実施形態と同様の構成について、説明を省略する場合がある。
【0127】
(把持部40の構成)
図23は、本実施形態の車輪型ロボット1が備える把持部40の構成を示す図であり、把持部40を上方から見た斜視図である。
本実施形態の把持部40は、上述した第一実施形態と同様、車輪型ロボット1を使用する被案内者が、車輪型ロボット1の使用時に手で把持する部分であり、入力値検出部42を介して、延在部30bの上面に取り付けられている。
また、把持部40は、近接覚センサ120と、把持部カバー122を備えている。
【0128】
近接覚センサ120は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手の位置を検出する。そして、近接覚センサ120は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手の位置を検出すると、この検出した位置を含む情報信号を、動作制御部22へ出力する。
また、近接覚センサ120は、複数のリング状センサと、基台124と、検知処理部(図示せず)を備えている。なお、本実施形態では、一例として、近接覚センサ120が、二つのリング状センサ(以降の説明及び図中では、第1リング状センサRS1、第2リング状センサRS2と記載する場合がある)を備えている場合を説明する。
【0129】
第1リング状センサRS1は、互いに並列に接続されており、等間隔で円環状に配置された複数の第1光センサ素子OSE1を有している。なお、本実施形態では、一例として、第1リング状センサRS1が、12個の第1光センサ素子OSE1を有している場合を説明する。
各第1光センサ素子OSE1は、フォトリフレクタセンサを用いて形成されている。フォトリフレクタセンサは、フォトリフレクタセンサ自身から出力される赤外線の反射光を読み取るセンサであり、フォトリフレクタセンサによって読みとられた反射光の強度は、アナログ値、または、デジタル値として出力される。そして、フォトリフレクタセンサから出射された赤外線が被案内者の手等で反射すると、その反射光は、フォトリフレクタセンサで受光される。
【0130】
第2リング状センサRS2は、第1リング状センサRS1と同様、互いに並列に接続されており、等間隔で円環状に配置された複数の第2光センサ素子OSE2を有している。なお、本実施形態では、一例として、第1リング状センサRS1と同様、第2リング状センサRS2が、12個の第2光センサ素子OSE2を有している場合を説明する。
また、円環状に配置された複数の第2光センサ素子OSE2で形成される円の外径は、円環状に配置された複数の第1光センサ素子OSE1で形成される円の外径よりも大きい。
【0131】
また、第2リング状センサRS2は、一つの第1光センサ素子OSE1の下方に一つの第2光センサ素子OSE2を配置した状態で、第1リング状センサRS1の下方に配置されている。さらに、第2リング状センサRS2は、複数の第2光センサ素子OSE2で形成される円の中心軸と複数の第1光センサ素子OSE1で形成される円の中心軸とを同軸として、第1リング状センサRS1の下方に配置されている。
【0132】
基台124は、円板状に形成されており、上側の面に、第1リング状センサRS1及び第2リング状センサRS2が取り付けられている。
また、基台124の下側の面には、図示しない突起部分が形成されており、この突起部分を介して、把持部40は入力値検出部42に取り付けられている。
検知処理部の説明は、後述する。
【0133】
把持部カバー122は、上面視で略円形であるとともに、側面視で略楕円形に形成されている。
また、把持部カバー122は、基台124の上側の面に取り付けられた状態の第1リング状センサRS1及び第2リング状センサRS2を、上方及び側方から覆うように、基台124に取り付けられている。
【0134】
また、把持部カバー122の外径面のうち、車輪型ロボット1の前進方向及び側方には、上述した第一実施形態と同様、複数個所の凹部44が設けられている。
凹部44は、片手の指よりも多く設ける。本実施形態では、一例として、凹部44を7箇所設ける場合を説明する。
また、把持部カバー122には、複数の孔部126が形成されている。
【0135】
各孔部126は、フォトリフレクタセンサから出射された赤外線が出射可能であるとともに、出射されて被案内者の手等で反射した反射光が入射可能な形状及び位置に配置されている。したがって、本実施形態では、把持部カバー122に24箇所の孔部126を形成した場合を説明する。
また、把持部カバー122の上面には、予め設定した案内用ロボット1の移動方向を示す位置に形状に形成した方向指示用突起部128が設けられている。
【0136】
本実施形態では、一例として、予め設定した案内用ロボット1の移動方向を、案内用ロボット1の前進方向とした場合を説明する。
具体的には、方向指示用突起部128は、把持部カバー122の上面において、案内用ロボット1の後退方向から前進方向へ向けて二等辺間の幅が縮小する二等辺三角形の形状に形成されている。
【0137】
[近接覚センサ120の作動原理]
以下、図1から図23を参照しつつ、図24を用いて、近接覚センサ120の作動原理を説明する。
図24は、図23中に示した近接覚センサ120が被案内者の手を検知する際の座標と、この座標が求められる原理とを説明するための図である。具体的には、図24(a)は、図23に示した近接覚センサ120が被案内者の手Hを検知する際の座標を説明するための図であり、図24(b)は、上記の座標が第1リング状センサRS1及び第2リング状センサRS2によって検知できることを説明するための図である。
【0138】
なお、図24(a)、(b)中に示した「o」は、いずれも第1リング状センサRS1によって形成される円環の中心点、第2リング状センサRS2によって形成される円環の中心点を示す。また、中心点oは、第1リング状センサRS1と第2リング状センサRS2とで一致しているため、近接覚センサ120によって検出される座標は、この中心点oを中心にして定められる。
【0139】
図24(a)中に示すように、近接覚センサ1は、被案内者の手Hからの反射光量の重心を、角度(以下、方位角と記す)「φ」、角度(以下、仰角と記す)「θ」、反射光強度「P」の三つの要素で表し、被案内者の手Hの位置を示す。なお、以降の説明及び図中では、3つの要素を、(φ、θ、P)と記載する場合がある。また、以降の説明では、上記のような座標を、「球座標」と記載する場合がある。
また、図24(a)中では、第1リング状センサRS1及び第2リング状センサRS2は、それぞれがx軸を有している。
【0140】
x軸には、第1リング状センサRS1のx軸1と、第2リング状センサRS2のx軸2とがあり、x軸1とx軸2とが90度の角度をなしているのは、第1リング状センサRS1と第2リング状センサRS2とが、その方位角φが90度の角度をなすように、基台124に取り付けられているためである。このような第1リング状センサRS1と第2リング状センサRS2との配置を、以降の説明では、「リング状センサの位相が90度ずれている」と記載する場合がある。
【0141】
また、図24(b)中に示すように、高さが異なるように基台124に取り付けられている第1リング状センサRS1と第2リング状センサRS2は、その赤外線の出射、入射の仰角θの範囲が相違する。
なお、図24(b)中では、第1光センサ素子OSE1の出射、入射の仰角範囲を範囲Bで示し、第2光センサ素子OSE2の出射、入射の仰角範囲を範囲Cで示している。図また、24(b)中に示した範囲Dは、範囲Bと範囲Cとが重なる部分であり、近接覚センサ1が被案内者の手Hを検知可能な範囲である。
第1リング状センサRS1と第2リング状センサRS2は、赤外線の出射、入射の範囲の相違により、被案内者の手Hに対する仰角θが相違する。このため、第1リング状センサRS1と第2リング状センサRS2の取り付け位置、または、取り付け角度の相違によって、被案内者の手Hの方位角φ、仰角θを検知することが可能である。
【0142】
[リング状センサ(第1リング状センサRS1と第2リング状センサRS2)の回路構成]
以下、図1から図24を参照しつつ、図25を用いて、第1リング状センサRS1及び第2リング状センサRS2の回路構成を説明する。
図25は、第1リング状センサRS1の回路構成を説明するための図である。なお、第2リング状センサRS2の構成は、第1リング状センサRS1と同様であるため、第2リング状センサRS2は、その回路構成の図示及び説明を省略する。
【0143】
なお、図25中に示した第1リング状センサRS1は、m×n個のセンサ素子が2次元に分布する既存のセンサの、mまたはnを1個としたものと等価である。このため、近接覚センサ120は、1次元の近接覚センサということができる。これにより、本実施形態の近接覚センサ120は、1次元の近接覚センサを用いて構成されることとなるため、比較的簡易な演算処理によって、被案内者の手Hの位置を極座標で表すことが可能となる。
【0144】
第1リング状センサRS1は、複数の第1光センサ素子によって構成されている。なお、図25中では、説明のために、第1光センサ素子OSE1を、第1光センサ素子311〜316と示す。
すなわち、第1リング状センサRS1は、第1光センサ素子311a〜316aと、311b〜316b(以降の説明では、第1光センサ素子311a、311b〜316a、316bと記載する場合がある。)を備えている。
【0145】
上述したように、第1光センサ素子311a、311b〜316a、316bは、いずれもフォトリフレクタセンサを用いて形成されており、フォトリフレクタセンサは、その抵抗値が反射光の強度によって変化する可変抵抗素子である。また、本実施形態では、可変抵抗素子としてフォトトランジスタを使用する。フォトトランジスタでは、反射光の強度によってエミッタ、コレクタ間の抵抗値が変化する。
【0146】
また、第1リング状センサRS1においては、第1光センサ素子316bと第1光センサ素子311aとの間に、抵抗値が一定の抵抗素子321aが接続されている。また、第1光センサ素子311bと第1光センサ素子312aとの間に抵抗素子321bが、第1光センサ素子312bと第1光センサ素子313aとの間に抵抗素子321cが、第1光センサ素子313bと第1光センサ素子314aとの間に抵抗素子321dが、第1光センサ素子314bと第1光センサ素子315aとの間に抵抗素子321eが、第1光センサ素子315bと第1光センサ素子316aとの間に抵抗素子321fがそれぞれ接続されている。
【0147】
さらに、抵抗素子321gは第1光センサ素子316bと直列に接続され、抵抗素子321hは第1光センサ素子316aと直列に接続される。以上の第1光センサ素子311a、316a〜311b、316bと、抵抗素子321a〜321hとは、図示しない電源の電源端子331と基準電圧(GND)端子332との間に接続されている。
また、直列に接続される抵抗素子321a〜321fの一端を第1リング状センサRS1の一方の端子301とし、他方の一端を端子302とする。さらに、端子301から出力される電圧の電圧値をV1とし、端子302から出力される電圧の電圧値をV2とする。
【0148】
[検知処理部の構成]
以下、図1から図25を参照しつつ、図26及び図27を用いて、検知処理部340の構成を説明する。
検知処理部340は、第1リング状センサRS1及び第2リング状センサRS2に接続されており、第1リング状センサRS1及び第2リング状センサRS2から入力された電圧値V1及び電圧値V2に基づき、被案内者の手Hの座標を算出する処理を行う。
検知処理部340が被案内者の手Hの座標を算出する処理では、方位角φ及び仰角θのうち少なくとも一方を用いる。これに加え、検知処理部340が被案内者の手Hの座標を算出する処理では、反射光強度Pを用いる場合もある。
【0149】
以下、方位角φ、仰角θ及び反射光強度Pを算出する処理について説明する。
すなわち、検知処理部340は、基台124に固定された状態の第1リング状センサRS1及び第2リング状センサRS2から出力された電圧を演算処理し、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する。
【0150】
・方位角φを算出する処理
図25中に示した、第1リング状センサRS1を流れる全電流Iall1は、以下の式(1)によって求められる。
Iall1=a(V1+V2) … (1)
また、全電流Iall1の分布のx軸まわりの一次モーメントIx1は、以下の式(2)によって求められる。
Ix1=b(V1−V2) … (2)
なお、上記の式(1)及び(2)中における「a」と「b」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0151】
上記の式(1)、(2)から、第1リング状センサRS1の各第1光センサ素子311a〜316a、311b〜316bに流れる電流の分布の中心位置を示す座標xc1が、以下の式(3)によって求められる。なお、電流分布の中心を示す座標がx座標だけで表されるのは、上述したように、近接覚センサ120が、光センサ素子(第1光センサ素子、第2光センサ素子)を一次元に配置した構成を有するためである。
xc1=Ix/Iall1 … (3)
【0152】
図26は、第1リング状センサRS1及び第2リング状センサRS2を基台124に取り付けた状態を示す模式図である。具体的には、図26(a)は、基台124に取り付けた状態の第1リング状センサRS1を示し、図26(b)は、第1リング状センサRS1と位相が90度ずれた状態で基台124に取り付けた状態の第2リング状センサRS2を示している。なお、図26(b)中には、第2リング状センサRS2が備える第2光センサ素子に対し、対応する第1光センサ素子と同じ数字及び英字の符合を付した上で、さらに、記号「’」を付している。
【0153】
図26(a)及び(b)中に示すように、第1リング状センサRS1と第2リング状センサRS2の位相が90度ずれた状態とは、第1リング状センサRS1のx軸(図26(a)中に示す「x1」、以降の説明では、「第1x軸x1」と記載する場合がある)と、第2リング状センサRS2のx軸(図26(b)中に示す「x2」、以降の説明では、「第2x軸x2」と記載する場合がある)とが、90度の角度をなす状態を示す。
【0154】
なお、本実施形態では、第1リング状センサRS1を基台124に固定した状態において、第1光センサ素子316aと第1光センサ素子316bとを結んだ直線の延長線を、第1x軸x1とする。これに伴い、本実施形態では、第2リング状センサRS2を基台124に固定した状態において、第2光センサ素子316a’と第2光センサ素子316b’とを結んだ直線の延長線を、第2x軸x2とする。
【0155】
そして、第1x軸x1では、第1光センサ素子316aと第1光センサ素子316bとを結んだ直線を二等分する点を、中心点oとする。同様に第2x軸x2では、第2光センサ素子316a’と第2光センサ素子316b’とを結んだ直線を二等分する点を、中心点oとする。
また、図26(a)中に破線で示した円c1は、第1光センサ素子311a、311b〜316a、316bが、全て中心点oから等しい距離にあることを示すための仮想的な線である。同様に、図26(b)中に破線で示した円c1’は、第2光センサ素子311a’、311b’〜316a’、316b’が、全て中心点oから等しい距離にあることを示すための仮想的な線である。
【0156】
また、図26(a)及び(b)中に破線で示した円c2は、近接覚センサ120によって被案内者の手Hが検知される範囲を示す。
図27は、図26に示したx座標と実際の方位角φとの対応を示した表である。具体的には、図27(a)は、図26(a)中に示す第1リング状センサRS1で検出されたx座標xc1を方位角φに変換するためのグラフであり、図27(b)は、図26(b)中に示す第2リング状センサRS2で検出されたx座標xc2を方位角φに変換するためのグラフである。
【0157】
図27(a)、(b)のいずれにおいても、縦軸はx座標xc1またはx座標xc2を示し、横軸は方位角φを示す。図27(a)によれば、x座標xc1が「1」であるとき方位角は0度であり、x座標xc1が「−1」であるとき方位角は180度であることが分かる。また、図27(b)によれば、x座標xc2が「1」であるとき方位角は90度であり、x座標xc2が「−1」であるとき方位角は270度であることが分かる。
【0158】
また、図24(a)中に示したように、x座標xc1はcos(φ)に相当し、x座標xc2はsin(φ)に相当する。このため、方位角φは、以下の式(4)によって求められる。
φ=atan2(xc2,xc1) … (4)
以上説明したように、検知処理部340が方位角φを算出する処理は、第1リング状センサRS1から出力された電圧を、第1リング状センサRS1の中心点oに対する被案内者の手Hの方位角である方位角φの余弦成分cosφに変換し、第1リング状センサRS1から出力された電圧を方位角φの正弦成分sinφに変換し、cosφとsinφとから、方位角φを算出するものである。
【0159】
・仰角θを算出する処理
第2リング状センサRS2を流れる全電流Iall2は、上記の式(1)により、全電流Iall1と同様に求められる。
したがって、検知処理部340は、全電流Iall1と全電流Iall2を用い、以下の式(5)によって、第1リング状センサRS1及び第2リング状センサRS2に対する被案内者の手Hの仰角θを算出する。
θ=c(Iall1−Iall2)/(Iall1+Iall2)+d … (5)
なお、上記の式(5)中における「c」と「d」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0160】
上記の式(5)において、(Iall1−Iall2)は、第1リング状センサRS1と被案内者の手Hとの距離と、第2リング状センサRS2と被案内者の手Hとの距離との差に関係する量を示す。
以上説明したように、検知処理部340が仰角θを算出する処理は、(Iall1−Iall2)を(Iall1+Iall2)で除算することにより、被案内者の手Hの反射率に依存しない無次元量として、第1リング状センサRS1及び第2リング状センサRS2の中心点oと被案内者の手Hとの距離を扱って求めることが可能である。
【0161】
・反射光強度Pを算出する処理
第1リング状センサRS1及び第2リング状センサRS2によって受光される反射光強度Pは、以下の式(6)によって求められる。
P=e(Iall1+Iall2) … (6)
なお、式(6)中における「e」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0162】
[近接覚センサ120が実施可能な他の処理]
近接覚センサ120は、被案内者の手Hの反射率pが既知である場合、以下の式(7)によって、第1リング状センサRS1及び第2リング状センサRS2の中心点oと被案内者の手Hとの距離rを算出することが可能である。
r= f・sqrt(p) … (7)
なお、式(7)中における「f」は、被案内者の手Hの材質や表面状態等によって決定される定数である。また、式(7)中における「sqrt」は、スクエアルートを示す。
なお、中心点oと被案内者の手Hとの距離rは、式(7)によって求められるものに限定されるものでなく、例えば、変換テーブルによって実測値を変換して求めることもできる。
【0163】
(動作制御部22の構成)
以下、図1から図27を参照しつつ、図28を用いて、動作制御部22の構成を説明する。
動作制御部22は、図28中に示すように、提供情報生成部108と、走行用モータ駆動制御部110と、基体傾斜角検出部112と、ロールピッチ機構駆動制御部114と、手掌位置検出部130と、把持部位置変化機構駆動制御部132を備えている。なお、図28は、動作制御部22の詳細な構成を示すブロック図である。
提供情報生成部108、走行用モータ駆動制御部110、基体傾斜角検出部112及びロールピッチ機構駆動制御部114の構成は、上述した第一実施形態と同様であるため、その説明を省略する。
【0164】
・手掌位置検出部130の構成
手掌位置検出部130は、近接覚センサ120から情報信号の入力を受け、把持部位置変化機構駆動制御部132へ出力する情報信号を生成し、この生成した情報信号を把持部位置変化機構駆動制御部132へ出力する。
すなわち、手掌位置検出部130は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出し、この検出した被案内者の手Hの位置を示す情報信号を生成して出力する。
【0165】
・把持部位置変化機構駆動制御部132の構成
把持部位置変化機構駆動制御部132は、手掌位置検出部130から情報信号の入力を受け、ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号を生成する。
ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号は、手掌位置検出部130から入力された情報信号に基づき、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置を算出して生成する。
【0166】
具体的には、手掌位置検出部130から入力された情報信号に基づき、把持部40(把持部40の上面の中心)を基準とした被案内者の手Hの位置に対応する方位角φ及び仰角θを算出する。ここで、方位角φは、車輪型ロボット1の前進方向を「0」として算出する。また、仰角θは、把持部40の上面の中心を基準とした鉛直上方を「0」として算出する。
【0167】
そして、算出した方位角φ及び仰角θから、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置を、X軸方向(車輪型ロボット1の前後方向)成分と、Y軸方向(車輪型ロボット1の左右方向)成分に分離する。
上記のX軸方向成分は以下の式(8)によって算出する。
dx=θcosφ … (8)
なお、式(8)中における「dx」は、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置の、車輪型ロボット1の前後方向への偏差(ずれ量)である。
【0168】
また、上記のY軸方向成分は以下の式(9)によって算出する。
dy=θsinφ … (9)
なお、式(9)中における「dy」は、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置の、車輪型ロボット1の左右方向への偏差(ずれ量)である。
【0169】
そして、把持部位置変化機構駆動制御部132は、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するような、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態(ナットの移動量)を算出する。
さらに、把持部位置変化機構駆動制御部132は、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態を、被案内者の手Hの下方へ把持部40が移動するような動作状態とするために、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。そして、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
【0170】
以上により、把持部位置変化機構駆動制御部132は、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、ロール側駆動部78とピッチ側駆動部92の駆動状態を制御する。
また、上述したように、ロールピッチ機構6(ロール側案内機構70、ピッチ側案内機構72)は、移動部4に対して把持部40の位置を変化させる把持部位置変化機構に対応している。
また、上述したように、ロール側駆動部78とピッチ側駆動部92は、把持部位置変化機構(ロールピッチ機構6)を駆動させる把持部位置変化機構駆動部に対応している。
【0171】
(動作)
以下、図1から図28を用いて、本実施形態の車輪型ロボット1が行う動作について説明する。
【0172】
車輪型ロボット1の使用時には、被案内者が、車輪型ロボット1の移動モードを、案内移動モードまたは自由移動モードに切り換え、把持部40を把持する。
このとき、被案内者は、把持部40を把持するために、手Hを把持部40へ近づける動作を行なう。しかしながら、例えば、被案内者の視覚が弱い場合等には、被案内者が、確実に把持部40を把持することが困難である状況が発生する。
【0173】
これに対し、本実施形態の車輪型ロボット1では、手掌位置検出部130が、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出する。これに加え、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御する。
【0174】
このため、被案内者の手Hが把持部40から離れていても、被案内者が把持部40に手を近づけると、移動部4の位置を変化させず、被案内者の手Hの下方へ把持部40が移動するように、移動部4に対して把持部40の位置を変化させることが可能となる。
これにより、車輪型ロボット1を使用する被案内者は、把持部40の視認が困難な状況であっても、手Hの下方に移動した把持部40を把持することが容易となる。
【0175】
(第二実施形態の効果)
以下、本実施形態の効果を列挙する。
(1)本実施形態の車輪型ロボット1では、手掌位置検出部130が、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出する。これに加え、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御する。
【0176】
このため、車輪型ロボット1の使用時に、被案内者の手Hが把持部40から離れていても、被案内者が把持部40に手を近づけると、移動部4の位置を変化させず、被案内者の手Hの下方へ把持部40が移動するように、移動部4に対して把持部40の位置を変化させることが可能となる。
その結果、車輪型ロボット1の使用時に、被案内者の手Hが把持部40から離れていても、被案内者が把持部40を把持するために手を移動させる距離を短縮することが可能となる。
【0177】
(2)本実施形態の車輪型ロボット1では、手掌位置検出部130が有する近接覚センサ120が、第1リング状センサRS1と第2リング状センサRS2とを、第1光センサ素子OSE1と第2光センサ素子OSE2とが互いに90度の角度をなし、且つ第1光センサ素子OSE1が第2光センサ素子OSE2よりも上に位置するように固定する基台124を備える。これに加え、近接覚センサ120が、基台124に固定された状態の第1リング状センサRS1及び第2リング状センサRS2から出力された電圧を演算処理し、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する検知処理部340を備える。
【0178】
このため、第1リング状センサRS1及び第2リング状センサRS2に対する被案内者の手Hの位置を、第1リング状センサRS1と第2リング状センサRS2を基準とした方位角及び仰角のうち少なくとも一方に基づいて検知することが可能となるため、把持部40に対する被案内者の手Hの位置を検出することが可能となる。
その結果、把持部位置変化機構駆動制御部132が、被案内者の手Hの下方へ把持部40を移動させる際に行なう制御の精度を向上させることが可能となる。
また、把持部位置変化機構駆動制御部132に対して、近接覚センサ120によって検出された球座標をダイレクトに出力することが可能となる。これにより、把持部位置変化機構駆動制御部132が行なう制御に関する構成を簡易化、小型化することに有利となる。
【0179】
(変形例)
以下、本実施形態の変形例を列挙する。
(1)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、所定の抵抗値を有する抵抗素子等で接続した一組のノードからなるノードペアをマトリックス状に配置して形成した二次元平面状のセンサを備え、二次元平面状のセンサから出力された情報であり、仰角θを含んでいない情報を用いて、被案内者の手Hの位置を検知する構成としてもよい。
【0180】
(2)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、把持部40の周辺を撮像可能なカメラを有する構成とし、カメラで撮像した画像から肌色の部分を抽出して、この抽出した部分を用いて被案内者の手Hの位置を検知する構成としてもよい。この場合、カメラで撮像した画像から抽出した肌色の部分を、検知処理部340で行なう処理に用い、被案内者の手Hの位置を検知する処理を補正する構成としてもよい。
すなわち、車輪型ロボット1の構成を、被案内者の手Hを撮像可能な手掌撮像部(カメラ)を備える構成とし、手掌位置検出部130の構成を、手掌撮像部が撮像した被案内者の手Hの画像を用いて、把持部40に対する被案内者の手Hの位置を検出する構成としてもよい。
【0181】
(3)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、把持部40の周辺の温度を感知可能な熱感知センサを有する構成とし、熱感知センサで感知した熱の位置を用いて、被案内者の手Hの位置を検知する構成としてもよい。この場合、熱感知センサで感知した熱の位置を、検知処理部340で行なう処理に用い、被案内者の手Hの位置を検知する処理を補正する構成としてもよい。
【0182】
(4)本実施形態の車輪型ロボット1では、移動部4に対して把持部40の位置を変化させる把持部位置変化機構を、ロールピッチ機構6により形成したが、把持部位置変化機構の構成は、これに限定するものではない。すなわち、把持部位置変化機構を、例えば、ナットの移動方向を「x軸」(例えば、図4参照)に向けたボールねじと、ナットの移動方向を「y軸」(例えば、図4参照)に向けたボールねじを備える構成としてもよい。この場合、例えば、入力値検出部42及び把持部40を、移動部4に対して「x軸」及び「y軸」へ移動可能な構成としてもよい。
【0183】
すなわち、把持部位置変化機構の構成を、移動部4に対する把持部40の位置を、平面視で直交する二つの軸方向へ変化させる構成としてもよい。
これに加え、さらに、把持部位置変化機構を、ナットの移動方向を「z軸」(例えば、図4参照)に向けたボールねじを備える構成としてもよい。
この場合、ナットの移動方向を「z軸」に向けたボールねじを、例えば、基体タワー部10に備える構成とし、さらに、基体タワー部10の構成を、上下方向に二分割した構成とする。そして、把持部位置変化機構駆動制御部132は、被案内者の手Hの下方へ把持部40を移動させる制御を行なった後、さらに、基体タワー部10のうち二分割した上側の部分を上昇させて、把持部40を、被案内者の手Hが接触するまで上昇させる制御を行なってもよい。なお、このような制御は、把持部位置変化機構をロールピッチ機構6により形成した場合にも適用可能である。
【0184】
すなわち、把持部位置変化機構の構成を、移動部4に対する把持部40の高さ位置を変化させる把持部高さ位置変化機構と、把持部高さ位置変化機構を駆動させる把持部高さ位置変化機構駆動部を備える構成とする。これに加え、把持部位置変化機構駆動制御部132の構成を、手掌位置検出部130が位置を検出した被案内者の手Hと把持部40が接触するように、把持部高さ位置変化機構駆動部の駆動状態を制御する構成とする。
【0185】
(5)本実施形態の車輪型ロボット1では、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御するが、これに限定するものではない。すなわち、例えば、入力値検出部42が動作制御部22へ出力した情報信号に基づき、被案内者の手Hと把持部40との接触を検出する。そして、被案内者の手Hと把持部40との接触を検出すると、把持部位置変化機構駆動部の駆動状態を制御して、移動部4に対する把持部40の位置が初期位置となるように、把持部位置変化機構駆動部の駆動状態を制御してもよい。なお、このような制御は、把持部位置変化機構を、移動部4に対して把持部40を「x軸」及び「y軸」へ移動可能な構成とした場合にも適用可能である。
【0186】
すなわち、車輪型ロボット1の構成を、被案内者による把持部40への入力を検出する入力値検出部42を備える構成とし、手掌位置検出部130の構成を、入力値検出部42が被案内者による把持部40への入力を検出すると、把持部40に対する被案内者の手Hの位置の検出を停止する構成とする。これに加え、把持部位置変化機構駆動制御部132の構成を、手掌位置検出部130が把持部40に対する被案内者の手Hの位置の検出を停止すると、移動部4に対する把持部40の位置が初期位置となるように、把持部位置変化機構駆動部の駆動状態を制御する構成とする。
【0187】
(6)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、被案内者の手Hの表面に、手Hの表面よりも光の反射率が高い反射マーカー部が配置されている場合は、手掌位置検出部130の構成を、反射マーカー部で反射した光であるマーカー反射光を検出する反射光検出部を備え、反射光検出部が検出したマーカー反射光を用いて、把持部40に対する被案内者の手Hの位置を検出する構成としてもよい。なお、反射マーカー部としては、例えば、再帰性反射マーカーやカラーマーカーを塗布した手袋や、手Hや指に装着可能なゴムバンド等を用いることが可能である。
【0188】
(7)本実施形態の車輪型ロボット1では、1つのリング状センサがセンサ素子を12個備える構成としたが、これに限定するものではない。すなわち、例えば、リング状センサは任意の数(例えば6個)のセンサ素子を備えるものであってもよい。また、抵抗素子321a〜321fが2つのセンサ素子を挟んで設けられる構成に限定されるものではなく、センサ素子の間の任意の位置に設けられるものであってもよい。
【符号の説明】
【0189】
1 車輪型ロボット
2 基体
4 移動部
6 ロールピッチ機構
8 基体ベース部
10 基体タワー部
12 ベースカバー部材
14 ベース部上側プレート
16 ベース部下側プレート
18 タワーカバー部材
20 第一距離センサ
22 動作制御部
24 プレート連結部材
26 三軸角度検出部
28 タワーフレーム部
30 グリップ支持部
32 第二距離センサ
34 前方撮影用カメラ
36 第三距離センサ
38 情報提供部
40 把持部
42 入力値検出部
44 凹部
46 移動部プレート
48 駆動輪
50 従動輪
52 走行用モータ
54 路車間距離検出部
56 滑落抑制部
58 駆動輪用ブラケット
60 回動部材
62 溝
64 滑落抑制板
66 抑制板取付け部
68 滑り止め部材
70 ロール側案内機構
72 ピッチ側案内機構
74 ロール側ベース軌道台
76 ロール側テーブル軌道台
78 ロール側駆動部
80 ロール側ベース転走面
82 ロール側テーブル転走面
84 ロール側接続環
86 ロール側接続ピン
88 ピッチ側ベース軌道台
90 ピッチ側テーブル軌道台
92 ピッチ側駆動部
94 ピッチ側ベース転走面
96 ピッチ側接続ピン
98 ピッチ側テーブル転走面
100 ロール側駆動モータ
102 ロール側直動案内機構
104 連結フレーム
106 ロール側接続ロッド
108 提供情報生成部
110 走行用モータ駆動制御部
112 基体傾斜角検出部
114 ロールピッチ機構駆動制御部
120 近接覚センサ
122 把持部カバー
124 基台
126 孔部
128 方向指示用突起部
130 手掌位置検出部
132 把持部位置変化機構駆動制御部
301 第1リング状センサRS1の一方の端子
302 第1リング状センサRS1の他方の端子
321 抵抗素子
331 電源端子
332 基準電圧(GND)端子
340 検知処理部
Ar 許容距離
fr 路車間距離検出部と溝の底面との距離
RS1 第1リング状センサ
RS2 第2リング状センサ
OSE1 第1光センサ素子
OSE2 第2光センサ素子
H 被案内者の手
V1 端子301から出力される電圧の電圧値
V2 端子302から出力される電圧の電圧値
【技術分野】
【0001】
本発明は、車輪型ロボットに関し、特に、目的地の場所を認識していない被案内者を目的地へ案内したり、目の見えない人の移動をサポートする車輪型ロボットに関する。
【背景技術】
【0002】
従来から、例えば、目的地を初めて訪問する人等、目的地の場所を明確に認識しておらず、目的地までの移動が困難な被案内者を目的地へ案内するための車輪型ロボットとして、例えば、特許文献1に記載の車輪型ロボットがある。
特許文献1に記載の車輪型ロボットは、基体を移動させるために駆動輪を駆動させる走行用モータと、走行用モータの駆動状態を制御するモータ制御部と、基体へ取り付けられた把持部と、被案内者による把持部への入力を検出する入力値検出部を備えている。
そして、特許文献1に記載の車輪型ロボットでは、モータ制御部が、入力値検出部が検出した入力に応じて基体の目標速度を算出し、この算出した目標速度で基体が移動するように、走行用モータの駆動状態を制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010‐271911号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の車輪型ロボットでは、斜面の走行時に、基体が大きく傾斜して不安定になり、被案内者が把持部を把持することが困難となるという問題が発生するおそれがある。
また、特許文献1に記載の車輪型ロボットでは、センサが故障したり、センサが反応しない段差等があった場合に、車輪が走行路から脱輪したり、それに伴い、基体が転倒するという問題が発生するおそれがある。
本発明は、上記のような問題点に着目してなされたもので、斜面の走行時における基体の傾斜や、車輪の脱輪及びそれに伴う基体の転倒を抑制することが可能な、車輪型ロボットを提供することを課題とする。
【課題を解決するための手段】
【0005】
〔発明1〕 上記課題を解決するために、発明1の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御することを特徴とする。
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。
【0006】
〔発明2〕 発明2の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする。
このような構成であれば、車輪型ロボットの進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となる。
【0007】
〔発明3〕 発明3の車輪型ロボットは、被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御し、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする。
【0008】
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。これに加え、車輪型ロボットの進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となる。
【0009】
〔発明4〕 発明4の車輪型ロボットは、発明1または発明3の車輪型ロボットにおいて、前記ロールピッチ機構は、前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って相対移動可能に連結することを特徴とする。
このような構成であれば、水平面に対して基体が傾斜していても、基体と移動部とを、車輪型ロボットの重心の変位を抑制するとともに、水平面に対する基体の傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動させることが可能となる。
【0010】
〔発明5〕 発明5の車輪型ロボットは、発明2または発明3の車輪型ロボットにおいて、前記路車間距離検出部が前記路車間距離を検出する検出方向を、前記路車間距離検出部から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたことを特徴とする。
このような構成であれば、駆動輪が脱落せずに走行可能な溝等が、車輪型ロボットの進行方向に存在している場合に、走行用モータ駆動制御部が、路車間距離が許容距離を超えていると誤判定することを、防止することが可能となる。
【0011】
〔発明6〕 発明6の車輪型ロボットは、発明1から発明5のうちいずれかの車輪型ロボットにおいて、前記車輪型ロボットを支持する複数の車輪と、
前記複数の車輪が前記路面に接地している状態で、前記路面よりも上方に配置されている滑落抑制部と、を備え、
前記滑落抑制部は、前記複数の車輪のうち少なくとも一つを除く車輪が前記路面から脱輪した状態で、前記路面と接触することを特徴とする。
このような構成であれば、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部を路面と接触させることが可能となる。
【0012】
〔発明7〕 発明7の車輪型ロボットは、発明1から発明6のうちいずれかの車輪型ロボットにおいて、前記移動部に対して前記把持部の位置を変化させる把持部位置変化機構と、
前記被案内者が前記把持部を把持していない状態で、前記把持部に対する前記被案内者の手の位置を検出する手掌位置検出部と、
前記把持部位置変化機構を駆動させる把持部位置変化機構駆動部と、
前記把持部位置変化機構駆動部の駆動状態を制御する把持部位置変化機構駆動制御部と、を備え、
前記把持部位置変化機構駆動制御部は、前記手掌位置検出部が位置を検出した前記被案内者の手の下方へ前記把持部が移動するように、前記把持部位置変化機構駆動部の駆動状態を制御することを特徴とする。
このような構成であれば、被案内者の手が把持部から離れていても、被案内者が把持部に手を近づけると、移動部の位置を変化させず、被案内者の手の下方へ把持部が移動するように、移動部に対して把持部の位置を変化させることが可能となる。
【0013】
〔発明8〕 発明8の車輪型ロボットは、発明7の車輪型ロボットにおいて、前記手掌位置検出部は、
互いに並列に接続された複数の第1光センサ素子を有し、且つ複数の前記第1光センサ素子が円環状に配置される第1リング状センサと、
互いに並列に接続された複数の第2光センサ素子を有し、且つ複数の前記第2光センサ素子が円環状に配置される第2リング状センサと、
前記第1リング状センサと前記第2リング状センサとを、前記第1光センサ素子と前記第2光センサ素子とが互いに90度の角度をなし、且つ前記第1光センサ素子が前記第2光センサ素子よりも上に位置するように固定する基台と、
前記基台に固定された状態の前記第1リング状センサ及び前記第2リング状センサから出力された電圧を演算処理し、方位角及び仰角のうち少なくとも一方に基づいて前記被案内者の手の位置を検知する検知処理部と、を備える近接覚センサを有することを特徴とする。
このような構成であれば、二つのリング状センサに対する被案内者の手の位置を、二つのリング状センサを基準とした方位角及び仰角のうち少なくとも一方に基づいて検知することが可能となるため、把持部に対する被案内者の手の位置を検出することが可能となる。
【発明の効果】
【0014】
以上説明したように、発明1の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように相対移動させることが可能となるため、基体の傾斜を抑制することが可能となる。
また、発明2の車輪型ロボットによれば、車輪型ロボットの進行方向に段差等が存在していても、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となるため、車輪の脱輪を抑制することが可能となる。
【0015】
また、発明3の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、水平面に対する基体の傾斜角度が減少するように相対移動させることが可能となるため、基体の傾斜を抑制することが可能となる。これに加え、車輪型ロボットの進行方向に段差等が存在していても、駆動輪が停止するように、走行用モータの駆動状態を制御することが可能となるため、車輪の脱輪及びそれに伴う基体の転倒を抑制することが可能となる。
【0016】
また、発明4の車輪型ロボットによれば、斜面の走行時において、水平面に対して基体が傾斜していても、基体と移動部とを、車輪型ロボットの重心の変位を抑制するとともに、基体の傾斜を抑制することが可能となる。
また、発明5の車輪型ロボットによれば、走行用モータ駆動制御部が、路車間距離が許容距離を超えていると誤判定することを、防止することが可能となるため、車輪型ロボットの誤動作発生を抑制することが可能となる。
また、発明6の車輪型ロボットによれば、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部を路面と接触させることが可能となるため、車輪型ロボットのうち、少なくとも滑落抑制部を除く部分の損傷を防止することが可能となる。
【0017】
また、発明7の車輪型ロボットによれば、被案内者の手が把持部から離れていても、移動部の位置を変化させず、被案内者の手の下方へ把持部が移動するように、移動部に対して把持部の位置を変化させることが可能となるため、被案内者が把持部を把持するために手を移動させる距離を短縮することが可能となる。
また、発明8の車輪型ロボットによれば、二つのリング状センサを基準とした方位角及び仰角のうち少なくとも一方に基づいて、把持部に対する被案内者の手の位置を検出することが可能となるため、被案内者の手の下方へ把持部を移動させる際に行なう制御の精度を向上させることが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明の第一実施形態の車輪型ロボットの構成を示す図である。
【図2】車輪型ロボットから、ベースカバー部材及びタワーカバー部材を外した状態を示す図である。
【図3】図2のIII線矢視図である。
【図4】基体ベース部及び移動部からベースカバー部材を外した状態を上面から見た斜視図である。
【図5】図1のV線矢視図である。
【図6】移動部の側面図であり、ベースカバー部材を取り外した状態を示す図である。
【図7】図1のVII線矢視図である。
【図8】路車間距離検出部が、路車間距離検出部と路面との距離を検出する状態を示す概略図である。
【図9】車輪型ロボットの走行時において、従動輪または駆動輪が脱輪した状態を示す概略図である。
【図10】ロールピッチ機構の構成を示す図である。
【図11】ロール側駆動部の構成を示す図である。
【図12】ロール側駆動部の作動時における、ロール側案内機構の動作状態を示す図である。
【図13】ピッチ側駆動部の作動時における、ピッチ側案内機構の動作状態を示す図である。
【図14】動作制御部の詳細な構成を示すブロック図である。
【図15】路車間距離検出部と路面との位置関係を示す図である。
【図16】路車間距離検出部と路面との位置関係を示す図である。
【図17】路車間距離検出部と路面との位置関係を示す図である。
【図18】上り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図19】下り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図20】車輪型ロボットの左側から右側への上り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図21】車輪型ロボットの左側から右側への下り勾配で傾斜した路面を走行する車輪型ロボットの状態を示す図である。
【図22】車輪型ロボットの走行時において、従動輪が脱輪した後に滑落を抑制する状態を示す概略図である。
【図23】本発明の第二実施形態の車輪型ロボットが備える把持部の構成を示す図である。
【図24】図23中に示した近接覚センサが被案内者の手を検知する際の座標と、この座標が求められる原理とを説明するための図である。
【図25】第1リング状センサの回路構成を説明するための図である。
【図26】第1リング状センサ及び第2リング状センサを基台に取り付けた状態を示す模式図である。
【図27】図26に示したx座標と実際の方位角φとの対応を示した表である。
【図28】動作制御部の詳細な構成を示すブロック図である。
【発明を実施するための形態】
【0019】
(第一実施形態)
以下、本発明の第一実施形態(以下、「本実施形態」と記載する)について、図面を参照しつつ説明する。
(構成)
まず、図1から図17を用いて、本実施形態の車輪型ロボット1の構成を説明する。
図1は、本実施形態の車輪型ロボット1の構成を示す図であり、車輪型ロボット1の側面図である。
図1中に示すように、本実施形態の車輪型ロボット1は、基体2と、移動部4を備えている。また、車輪型ロボット1は、後述するロールピッチ機構6(図2参照)を備えている。
【0020】
(基体2の構成)
以下、図1を参照しつつ、図2から図5を用いて、基体2の構成を説明する。
基体2は、基体ベース部8と、基体タワー部10を備えている。
(基体ベース部8の構成)
基体ベース部8は、ベースカバー部材12を備えている。
ベースカバー部材12は、上面視で略五角形をなしており、上面及び下面が開口した筒状体により形成されている。なお、ベースカバー部材12の形状は、これに限定するものではなく、例えば、上面視で、円形や、五角形以外の多角形をなす形状に形成してもよい。
【0021】
また、ベースカバー部材12の内部には、図2及び図3中に示すように、ベース部上側プレート14と、ベース部下側プレート16が配置されている。なお、図2は、車輪型ロボット1から、ベースカバー部材12及び後述するタワーカバー部材18を外した状態を示す図であり、車輪型ロボット1の側面図である。また、図3は、図2のIII線矢視図であり、車輪型ロボット1の正面図である。
【0022】
ベース部上側プレート14は、ベースカバー部材12の上面を閉塞する板状部材であり、その下面(図1中における下側の面)には、第一距離センサ20が取り付けられている。
第一距離センサ20の取り付け位置は、具体的に、ベース部上側プレート14の下面のうち、車輪型ロボット1の幅方向(図3中における左右方向)の中心付近であるとともに、ベース部上側プレート14の先端側(図1中では、左側の端部側)である。
【0023】
第一距離センサ20は、例えば、レーザレンジセンサを用いて形成されており、車輪型ロボット1の前進方向(図1中では、左方向)に対し、第一距離センサ20と対象物(障害物等)との距離を検出可能なセンサである。また、第一距離センサ20は、第一距離センサ20と対象物との距離を検出すると、この検出した距離を含む情報信号を、後述する動作制御部22へ出力する。なお、第一距離センサ20が対象物との距離を検出可能な範囲は、例えば、車輪型ロボット1の上面視において、第一距離センサ20から前方へ延在する線を基準として、左右へ約135[°]の範囲である。
【0024】
ベース部下側プレート16は、ベースカバー部材12の内部において、ベース部上側プレート14の下方に配置されており、上下方向に延在する柱状のプレート連結部材24を複数個用いて、ベース部上側プレート14と連結されている。なお、ベース部下側プレート16とベース部上側プレート14は、対向する面同士が平行となっている。
また、ベース部下側プレート16の上面(ベース部上側プレート14と対向する面)には、三軸角度検出部26と、動作制御部22が取り付けられている。
【0025】
三軸角度検出部26は、三軸角度検出部26を交点として互いに直交する三軸の軸回りの加速度(と磁力)を検出可能な三軸センサを用いて形成されており、図4中に示すように、ベース部下側プレート16のうち、車輪型ロボット1の幅方向の中心付近に配置されている。また、三軸角度検出部26は、三軸のうち少なくとも一軸の軸回りの加速度(と磁力)を検出すると、この検出した加速度(と磁力)を含む情報信号を、動作制御部22へ出力する。なお、図4は、基体ベース部8及び移動部4からベースカバー部材12を外した状態を上面から見た斜視図である。
【0026】
本実施形態では、三軸角度検出部26が軸回りの加速度(と磁力)を検出可能な三軸を、車輪型ロボット1の前後方向(図1中における左右方向)に延在する軸(以降の説明では、「x軸」と記載する場合がある)と、車輪型ロボット1の幅方向に延在する軸(以降の説明では、「y軸」と記載する場合がある)と、車輪型ロボット1の上下方向(図1中における上下方向)に延在する軸(以降の説明では、「z軸」と記載する場合がある)とする場合を説明する。
動作制御部22は、CPU(Central Processing Unit)等を用いて形成されており、ベース部下側プレート16のうち、車輪型ロボット1の幅方向の中心付近において、三軸角度検出部26よりも右(図3中における左方向)に配置されている。なお、動作制御部22の詳細な構成は、後述する。
【0027】
(基体タワー部10の構成)
基体タワー部10は、タワーカバー部材18を備えている。
タワーカバー部材18は、柱状部18aと、水平部18bを備えている。
柱状部18aは、中空の角柱状に形成されており、その下端側は、ベース部上側プレート14の上面(図1中における上側の面)において、車輪型ロボット1の前進方向(図1中では、左方向)へオフセットして取り付けられている。また、柱状部18aの軸方向(長手方向)は、鉛直線に対して、車輪型ロボット1の後退方向(図1中では、右方向)へ傾斜している。
【0028】
水平部18bは、柱状部18aの上端側と連続しており、柱状部18aと同様、中空の角柱状に形成されている。また、水平部18bの軸方向(長手方向)は、ベース部下側プレート16及びベース部上側プレート14の面と平行または略平行となっている。
また、タワーカバー部材18の内部には、図2及び図3中に示すように、タワーフレーム部28と、グリップ支持部30が配置されている。
【0029】
タワーフレーム部28は、柱状部18aの内部に配置されており、ベース部上側プレート14の上面に取り付けられているタワー部ブラケット28aと、このタワー部ブラケット28aに取り付けられている複数本のタワー部支柱28bを備えている。
タワー部ブラケット28aの下部には、情報提供部38が配置されている。
情報提供部38は、例えば、音声を出力可能なスピーカを用いて形成されており、車輪型ロボット1を使用する被案内者に対して、案内に必要な音声情報等を提供する。なお、情報提供部38が出力する音声は、例えば、車輪型ロボット1の使用状況等に応じて、動作制御部22により設定される。
【0030】
また、タワーフレーム部28の上端側には、第二距離センサ32と、前方撮影用カメラ34が取り付けられている。
第二距離センサ32は、例えば、レーザレンジセンサを用いて形成されており、柱状部18aから車輪型ロボット1の後退方向へ突出している。
また、第二距離センサ32は、下方に対し、第二距離センサ32と車輪型ロボット1の走行面(路面)との距離(上下方向の距離)を検出可能なセンサである。そして、第二距離センサ32は、第二距離センサ32と障害物等との距離を検出すると、この検出した距離を含む情報信号を、動作制御部22へ出力する。なお、第二距離センサ32が走行面との距離を検出可能な範囲は、例えば、車輪型ロボット1を前後方向から見て、第二距離センサ32から鉛直方向下方へ延在する線を基準として、左右へ約120[°]の範囲である。
【0031】
前方撮影用カメラ34は、例えば、CCD(Charge Coupled Device)カメラを用いて形成されており、鉛直線に対し、柱状部18aの傾斜度合いと略平行に傾斜した状態で、柱状部18aから車輪型ロボット1の前進方向へ突出している。
また、前方撮影用カメラ34は、車輪型ロボット1の前方を撮像可能なカメラである。そして、前方撮影用カメラ34は、車輪型ロボット1の前方の映像を撮像すると、この検出した撮像を含む情報信号を、動作制御部22へ出力する。なお、前方撮影用カメラ34が撮像可能な範囲は、例えば、前方撮影用カメラ34の撮像方向の中心線から約60[°]の円形の範囲である。
【0032】
グリップ支持部30は、水平部18bの内部に配置された板状部材であり、タワーフレーム部28の上端側に取り付けられている取り付け部30aと、この取り付け部から車輪型ロボット1の後退方向へ延在する延在部30bを備えている。
取り付け部30aの上面には、第三距離センサ36が取り付けられている。
第三距離センサ36は、例えば、レーザレンジセンサを用いて形成されており、車輪型ロボット1の前進方向(図1中では、左方向)に対し、第三距離センサ36と対象物(障害物等)との距離を検出可能なセンサである。また、第三距離センサ36は、第三距離センサ36と対象物との距離を検出すると、この検出した距離を含む情報信号を、後述する動作制御部22へ出力する。なお、第三距離センサ36が対象物との距離を検出可能な範囲は、例えば、車輪型ロボット1の上面視において、第三距離センサ36から前方へ延在する線を基準として、左右へ約135[°]の範囲であるとともに、車輪型ロボット1の側面視において、第三距離センサ36から前方へ延在する線を基準として上へ約15[°]、下へ約60[°]の範囲である。
【0033】
なお、第三距離センサ36は、レーザレンジセンサに限定するものではなく、例えば、赤外線センサや超音波センサ等を用いて形成してもよい。これは、第一距離センサ20及び第二距離センサ32に関しても、同様である。
延在部30bは、側面視でベース部上側プレート14と平行となっている。
延在部30bの上面には、把持部40が配置されている。
【0034】
(把持部40の構成)
把持部40は、車輪型ロボット1を使用する被案内者が、車輪型ロボット1の使用時に手で把持する部分であり、入力値検出部42を介して、延在部30bの上面に取り付けられている。すなわち、把持部40は、基体2に取り付けられている。
また、把持部40は、上面視で、直径が100[mm]程度の略円形であるとともに、側面視で、厚さが30[mm]程度の略楕円形に形成されている。把持部40の下面側には、図示しない突起部分が形成されており、この突起部分を介して、把持部40は入力値検出部42に取り付けられている。
【0035】
また、把持部40の外径面のうち、車輪型ロボット1の前進方向及び側方には、図5中に示すように、把持部40の上面から下面へ連続する凹部44が、複数個所設けられている。なお、図5は、図1のV線矢視図であり、把持部40を上方から見た斜視図である。
凹部44は、片手の指よりも多く設ける。本実施形態では、一例として、凹部44を10箇所設ける場合を説明する。
凹部44の深さは、例えば、6[mm]程度に設定されている。また、隣り合う凹部44同士の間隔は、例えば、22[mm]程度に設定されている。これらの値は、被案内者の指の太さに応じて、被案内者の指のうち、第一関節及びその周辺が凹部44に合致しやすい値として設定する。
【0036】
なお、本実施形態では、一例として、把持部40に、図示しない移動モード切り換え操作部が設けられている場合を説明する。
移動モード切り換え操作部は、例えば、ボタンにより形成する。そして、被案内者によるボタン操作により、車輪型ロボット1を目的地まで移動させる案内移動モードと、車輪型ロボット1を把持部40への入力に応じた方向へ移動させる自由移動モードに切り換える。
【0037】
(入力値検出部42の構成)
入力値検出部42は、延在部30bの上面のうち、情報提供部38よりも車輪型ロボット1の後退方向側に取り付けられている。
また、入力値検出部42は、例えば、入力値検出部42を交点として互いに直交する三軸の軸方向に付与される力と、三軸の軸回りのモーメントを検出可能な六軸力センサを用いて形成されている。また、入力値検出部42は、三軸のうち少なくとも一軸の軸方向に付与される力や、三軸のうち少なくとも一軸の軸回りのモーメントを検出すると、この検出した力やモーメントを含む情報信号を、動作制御部22へ出力する。
本実施形態では、入力値検出部42が軸方向に付与される力及び軸回りのモーメントを検出可能な三軸を、上述した「x軸」、「y軸」及び「z軸」とする場合を説明する。
【0038】
(移動部4の構成)
以下、図1から図5を参照しつつ、図6及び図7を用いて、移動部4の詳細な構成を説明する。
移動部4は、基体2の下方に配置されて基体2を下方から支持しており、被案内者による把持部40への入力に応じて、基体2を移動させる。
また、移動部4は、移動部プレート46と、駆動輪48と、従動輪50と、走行用モータ52と、路車間距離検出部54と、滑落抑制部56を備えている。
【0039】
(移動部プレート46の構成)
移動部プレート46は、上面視でベースカバー部材12と重なる板状部材であり、ベースカバー部材12の内部において、ベース部下側プレート16の下方に配置されている。
また、移動部プレート46とベース部上側プレート14は、製造時等、車輪型ロボット1を水平面上に配置した状態で、対向する面同士が平行となっている。
【0040】
(駆動輪48の構成)
駆動輪48は、走行用モータ52が発生する駆動力により回転して基体2を移動させる車輪であり、駆動輪用ブラケット58を介して、移動部プレート46よりも下方へ突出した状態で、移動部プレート46に取り付けられている。
また、駆動輪48は、車輪型ロボット1を前後方向から見て、移動部プレート46の中心よりも左側に配置された左側駆動輪48Lと、移動部プレート46の中心よりも右側に配置された右側駆動輪48Rから形成されている。
【0041】
(従動輪50の構成)
従動輪50は、キャスタ等、上述した「z軸」回りに回動可能な回動部材60を介して、移動部プレート46よりも下方へ突出した状態で、移動部プレート46の下面(図1中における下方向の面)に取り付けられている。なお、従動輪50の外径(タイヤ径)は、駆動輪48の外径と同一または略同一とする。
また、従動輪50は、移動部プレート46の下面において、車輪型ロボット1の幅方向の中心付近であるとともに、駆動輪48よりも車輪型ロボット1の前進方向側に配置されている。
【0042】
なお、移動部プレート46のうち、下面に回動部材60を取り付けている部分は、駆動輪用ブラケット58を取り付けている部分よりも、基体2に近接している。そして、移動部プレート46のうち下面に回動部材60を取り付けている部分は、上下方向に延在する部分を介して、駆動輪用ブラケット58を取り付けている部分と連続して形成されている。
以上により、車輪型ロボット1は、車輪型ロボット1を支持する複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)を備えている。
【0043】
(走行用モータ52の構成)
走行用モータ52は、駆動輪48を回転駆動可能なモータで形成されており、動作制御部22が出力する指令信号に基づいて駆動して、被案内者による把持部40への入力に応じて基体2が移動するように、駆動輪48を駆動させる。また、走行用モータ52が発生させた駆動力は、図示しない駆動用プーリ等を介して、駆動輪48に伝達される。
また、走行用モータ52は、左側駆動輪48Lと右側駆動輪48Rに対し、それぞれ、個別に設けられている。すなわち、本実施形態の車輪型ロボット1は、二つの走行用モータ52を備えている。
【0044】
また、走行用モータ52は、無励磁作動型ブレーキの作動機構を有している。
無励磁作動型ブレーキは、後述するPSDセンサの検出値によって、電流(界磁電流)の供給を停止する回路により作動する機構であり、作動状態において、駆動輪48へ制動力を付与する機構である。このため、動作制御部22に不具合があった場合でも、走行用モータ52を停止させて、輪型案内用ロボット1の移動を止めることが可能である。
【0045】
(路車間距離検出部54の構成)
路車間距離検出部54は、例えば、PSD(Position Sensitive Detector)センサを用いて形成されており、移動部プレート46の下面に取り付けられている。
また、路車間距離検出部54は、予め設定した方向に対し、駆動輪48が走行する走行路の路面と路車間距離検出部54との距離を検出して、駆動輪48が走行する走行路の路面と基体2との距離である路車間距離を検出可能なセンサである。また、路車間距離検出部54は、路車間距離を検出すると、この検出した路車間距離を含む情報信号を、PSDセンサ用回路(図示せず)へ出力する。
【0046】
路車間距離検出部54が、路車間距離を検出する方向は、図6中に示すように、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とする。なお、図6は、移動部4の側面図であり、ベースカバー部材12を取り外した状態を示す図である。
すなわち、本実施形態では、路車間距離検出部54は、車輪型ロボット1の前方のみに対し、路車間距離を検出する。これは、一般的に、車輪型ロボット1は、後退走行の割合が前進走行と比較して非常に少なく、また、後退走行を行う際には、前進走行を行った経路を戻るため、車輪型ロボット1の後方に対して、路車間距離を検出する必要性が少ないためである。
【0047】
また、路車間距離検出部54は、図7中に示すように、移動部プレート46の下面において、複数個所に取り付けられている。なお、図7は、図1のVII線矢視図であり、移動部プレート46の下面を示す図である。
本実施形態では、一例として、移動部プレート46の下面において、五箇所に路車間距離検出部54を取り付けた場合を説明する。したがって、本実施形態の車輪型ロボット1は、五個の路車間距離検出部54を備えている。
【0048】
五個の路車間距離検出部54のうち一つは、従動輪50よりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、従動輪50よりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54a」と記載する。
また、五個の路車間距離検出部54のうち二つは、車輪型ロボット1を後方から見て、従動輪50の左側及び右側に配置されている。なお、図7中及び以降の説明では、従動輪50の左側に配置されている路車間距離検出部54を、「路車間距離検出部54b」と記載し、従動輪50の右側に配置されている路車間距離検出部54を、「路車間距離検出部54c」と記載する。
【0049】
また、五個の路車間距離検出部54のうち残りの二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54d」と記載し、右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている路車間距離検出部54を、「路車間距離検出部54e」と記載する。
【0050】
以下、図1から図7を参照しつつ、図8を用いて、五個の路車間距離検出部54a〜54eが、路車間距離を検出する状態(a〜g)について説明する。なお、図8は、路車間距離検出部54が、路車間距離を検出する状態を示す概略図であり、車輪型ロボット1を上方から俯瞰で見た図である。
a.車輪型ロボット1の前進走行(直進)中に、前方に段差が存在している場合、図8(a)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
【0051】
b.車輪型ロボット1の前進走行(直進)中に、左側駆動輪48Lの前方に段差が存在している場合、図8(b)中に示すように、路車間距離検出部54dが、左側駆動輪48Lの前方に存在している段差に対し、路車間距離を検出する。
c.車輪型ロボット1の前進走行(直進)中に、右側駆動輪48Rの前方に段差が存在している場合、図8(c)中に示すように、路車間距離検出部54eが、右側駆動輪48Rの前方に存在している段差に対し、路車間距離を検出する。
【0052】
d.車輪型ロボット1の左旋回走行中に、左側に段差が存在している場合、図8(d)中に示すように、路車間距離検出部54bが、車輪型ロボット1の左側に存在している段差に対し、路車間距離を検出する。
e.車輪型ロボット1の右旋回走行中に、右側に段差が存在している場合、図8(e)中に示すように、路車間距離検出部54cが、車輪型ロボット1の右側に存在している段差に対し、路車間距離を検出する。
【0053】
f.車輪型ロボット1の前進走行(直進)中に、前方に駆動輪48及び従動輪50が脱落しない幅であり、車輪型ロボット1の前進走行に対して垂直または略垂直に延在する溝62が存在している場合、図8(f)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
g.車輪型ロボット1の前進走行(直進)中に、前方に駆動輪48及び従動輪50が脱落しない幅であり、車輪型ロボット1の前進走行に対して傾斜して延在する溝62が存在している場合、図8(g)中に示すように、路車間距離検出部54aが、車輪型ロボット1の前方に存在している段差に対し、路車間距離を検出する。
【0054】
(滑落抑制部56の構成)
滑落抑制部56は、滑落抑制板64と、抑制板取付け部66を備えており、移動部プレート46の下面に取り付けられている。
滑落抑制板64は、板状部材であり、移動部プレート46の下方に配置されている。なお、滑落抑制板64と移動部プレート46は、対向する面同士が平行となっている。
【0055】
また、滑落抑制板64の下面(移動部プレート46と対向する面と反対側の面)には、ゴム等の弾性材料を用いて形成された板状の滑り止め部材68が、接着剤等を用いて取り付けられている。なお、滑り止め部材68の表面(移動部プレート46と対向する面と反対側の面)には、例えば、格子状に複数本の溝を形成してもよい。
抑制板取付け部66は、移動部プレート46の下面から下方へ向けて延在する柱状部材であり、移動部プレート46の下面と滑落抑制板64の上面とを連結して、滑落抑制板64を移動部プレート46に連結している。
【0056】
抑制板取付け部66の長さは、滑落抑制板64の、移動部プレート46の下面からの突出度合いが、駆動輪48及び従動輪50の、移動部プレート46の下面からの突出度合い未満となる長さに設定する。
したがって、滑落抑制部56は、移動部プレート46の下面から突出した状態で、移動部プレート46の下面に取り付けられている。また、滑落抑制部56は、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)が路面に接地している状態で、路面よりも上方に配置されている。
【0057】
また、滑落抑制部56は、図7中に示すように、移動部プレート46の下面において、複数個所に取り付けられている。
本実施形態では、一例として、移動部プレート46の下面において、七箇所に滑落抑制部56を取り付けた場合を説明する。したがって、本実施形態の車輪型ロボット1は、七個の滑落抑制部56を備えている。
【0058】
七個の滑落抑制部56のうち二つは、車輪型ロボット1を後方から見て、従動輪50の左側及び右側に配置されている。なお、図7中及び以降の説明では、従動輪50の左側に配置されている滑落抑制部56を、「滑落抑制部56a」と記載し、従動輪50の右側に配置されている滑落抑制部56を、「滑落抑制部56b」と記載する。
また、七個の滑落抑制部56のうち一つは、従動輪50よりも車輪型ロボット1の後方に配置されている。なお、図7中及び以降の説明では、従動輪50よりも車輪型ロボット1の後方に配置されている滑落抑制部56を、「滑落抑制部56c」と記載する。
【0059】
また、七個の滑落抑制部56のうち二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の前方に配置されている滑落抑制部56を、「滑落抑制部56d」と記載し、右側駆動輪48Rよりも車輪型ロボット1の前方に配置されている滑落抑制部56を、「滑落抑制部56e」と記載する。
また、七個の滑落抑制部56のうち残りの二つは、左側駆動輪48L及び右側駆動輪48Rよりも車輪型ロボット1の中心側に配置されている。なお、図7中及び以降の説明では、左側駆動輪48Lよりも車輪型ロボット1の中心側に配置されている滑落抑制部56を、「滑落抑制部56f」と記載し、右側駆動輪48Rよりも車輪型ロボット1の中心側に配置されている滑落抑制部56を、「滑落抑制部56g」と記載する。
【0060】
以下、図1から図7を参照しつつ、図9を用いて、七個の滑落抑制部56a〜56gと従動輪50及び駆動輪48により、段差が存在している面で脱輪した車輪型ロボット1の滑落を抑制する状態(a〜k)について説明する。なお、図9は、車輪型ロボット1の走行時において、従動輪50または駆動輪48が脱輪した状態を示す概略図であり、車輪型ロボット1を上方から俯瞰で見た図である。
【0061】
a.車輪型ロボット1の前進走行(直進)中に、前方に存在している段差(図8(a)参照、以下の説明でも同様)に従動輪50が脱輪した場合、図9(a)中に示すように、滑落抑制部56cが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56cと、左側駆動輪48L及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
b.車輪型ロボット1の右旋回走行中に、右側に存在している段差に従動輪50が脱輪した場合、車輪型ロボット1の走行面から左側駆動輪48Lが離れた状態で、図9(b)中に示すように、滑落抑制部56a及び滑落抑制部56eが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56a及び滑落抑制部56eと、右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
【0062】
c.車輪型ロボット1の左旋回走行中に、左側に存在している段差に従動輪50が脱輪した場合、車輪型ロボット1の走行面から右側駆動輪48Rが離れた状態で、図9(c)中に示すように、滑落抑制部56b及び滑落抑制部56dが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56b及び滑落抑制部56dと、左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
d.車輪型ロボット1の前進走行(直進)中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(d)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0063】
e.車輪型ロボット1の前進走行(直進)中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(e)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
f.車輪型ロボット1の後退走行(直進)中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(f)中に示すように、滑落抑制部56eが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56eと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0064】
g.車輪型ロボット1の後退走行(直進)中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(g)中に示すように、滑落抑制部56dが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56dと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
h.車輪型ロボット1の右旋回走行中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(h)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
【0065】
i.車輪型ロボット1の右旋回走行中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(i)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
j.車輪型ロボット1の左旋回走行中に、右側に存在している段差に右側駆動輪48Rが脱輪した場合、図9(j)中に示すように、滑落抑制部56gが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56gと、従動輪50及び左側駆動輪48Lが、車輪型ロボット1を支持して、滑落を抑制する。
【0066】
k.車輪型ロボット1の左旋回走行中に、左側に存在している段差に左側駆動輪48Lが脱輪した場合、図9(k)中に示すように、滑落抑制部56fが、車輪型ロボット1の走行面と接触する。これにより、滑落抑制部56fと、従動輪50及び右側駆動輪48Rが、車輪型ロボット1を支持して、滑落を抑制する。
以上により、移動部プレート46の下面において、七個の滑落抑制部56a〜56gを取り付ける位置は、車輪型ロボット1の形状・重心や、従動輪50及び駆動輪48の位置・形状等に応じて、上述したように、脱輪した車輪型ロボット1の滑落を抑制可能な位置に設定する。
【0067】
同様に、滑落抑制板64の、移動部プレート46の下面からの突出度合いは、車輪型ロボット1の形状・重心や、従動輪50及び駆動輪48の位置・形状等に応じて、上述したように、脱輪した車輪型ロボット1の滑落を抑制可能な位置に設定する。
したがって、滑落抑制部56は、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)のうち少なくとも一つを除く車輪が路面から脱輪した状態で、路面と接触する位置・形状に設定する。
【0068】
(ロールピッチ機構6の構成)
以下、図1から図9を参照しつつ、図10から図13を用いて、ロールピッチ機構6の詳細な構成を説明する。
ロールピッチ機構6は、基体2と移動部4との間に配置されており、基体2と移動部4とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結している。
ここで、ロールピッチ機構6が基体2と移動部4とを相対移動可能に連結する二つの軸は、上述した「x軸」と「y軸」である。
【0069】
また、本実施形態では、ロールピッチ機構6の構成を、一例として、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成とした場合を説明する。なお、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成としては、例えば、(株)日本ベアリング製の「ゴニオウェイ」を二つ用いる。
具体的には、ロールピッチ機構6は、図10中に示すように、ロール側案内機構70と、ピッチ側案内機構72を備えている。なお、図10は、ロールピッチ機構6の構成を示す図であり、図10(a)は、ロールピッチ機構6の上面図、図10(b)は、図10(a)のB線矢視図であり、図10(c)は、図10(a)のC線矢視図、図10(d)は、ロールピッチ機構6を上方から見た斜視図である。
【0070】
(ロール側案内機構70の構成)
ロール側案内機構70は、ロール側ベース軌道台74と、ロール側テーブル軌道台76を備えており、ロール側駆動部78が発生させる駆動力により駆動する。なお、ロール側駆動部78の説明は、後述する。
ロール側ベース軌道台74は、断面が凹部状となるように形成されており、その底面が、図示しないボルト等を用いて、移動部プレート46の上面(図1中における上方向の面)に取り付けられている。
【0071】
また、ロール側ベース軌道台74のうち、底面を挟む二つの壁を形成する部分には、それぞれ、車輪型ロボット1の幅方向に沿って連続するとともに、互いに対向するロール側ベース転走面80が形成されている。
ロール側ベース転走面80は、側面視で、長さ方向の中心部が最も基体2側(上方)に近く、端部へ向かうにつれて基体2から離れるように傾斜する曲線状に形成されている。また、ロール側ベース転走面80は、ロール側ベース転走面80の長さ方向から見たV溝で形成されている。
【0072】
ロール側テーブル軌道台76は、断面が下方へ突出する凸部状となるように形成されており、突出部分がロール側ベース軌道台74と嵌合した状態で、ロール側ベース軌道台74の上方(基体2側)に配置されている。
また、ロール側テーブル軌道台76の突出部分には、ロール側ベース転走面80と対向するロール側テーブル転走面82が形成されている。また、ロール側テーブル転走面82は、ロール側ベース転走面80と同様、ロール側テーブル転走面82の長さ方向から見たV溝で形成されている。
【0073】
また、ロール側テーブル軌道台76のうち、車輪型ロボット1を前進方向から見た右側の面には、後述するロール側接続環84内に挿通させるロール側接続ピン86が取り付けられている。
ロール側接続ピン86は、円柱状に形成されており、ロール側テーブル軌道台76から、車輪型ロボット1を前進方向から見た右側へ突出している。
ロール側ベース転走面80とロール側テーブル転走面82との間には、図示しない複数の転動体(ボール)と、隣り合う転動体間の距離を維持する保持器(図示せず)が介装されている。
【0074】
(ピッチ側案内機構72の構成)
ピッチ側案内機構72は、ピッチ側ベース軌道台88と、ピッチ側テーブル軌道台90を備えており、ピッチ側駆動部92が発生させる駆動力により駆動する。なお、ピッチ側駆動部92の説明は、後述する。
ピッチ側ベース軌道台88は、ロール側ベース軌道台74と同様、断面が凹部状となるように形成されており、その底面が、図示しないボルト等を用いて、ロール側テーブル軌道台76の上面(図1中における上方向の面)に取り付けられている。
【0075】
また、ピッチ側ベース軌道台88のうち、底面を挟む二つの壁を形成する部分には、それぞれ、車輪型ロボット1の前後方向に沿って連続するとともに、互いに対向するピッチ側ベース転走面94が形成されている。
ピッチ側ベース転走面94は、側面視で、長さ方向の中心部が最も基体2側(上方)に近く、端部へ向かうにつれて基体2から離れるように傾斜する曲線状に形成されている。また、ピッチ側ベース転走面94は、ピッチ側ベース転走面94の長さ方向から見たV溝で形成されている。なお、ピッチ側ベース転走面94の曲率は、ロール側ベース転走面80の曲率と同一に設定する。
【0076】
また、ピッチ側ベース軌道台88のうち、車輪型ロボット1を前進方向から見た左側の面には、後述するピッチ側接続環内に挿通させるピッチ側接続ピン96が取り付けられている。
ピッチ側接続ピン96は、円柱状に形成されており、ピッチ側テーブル軌道台90から、車輪型ロボット1を前進方向から見た左側において、下方へ突出している。
ピッチ側テーブル軌道台90は、ロール側テーブル軌道台76と同様、断面が下方へ突出する凸部状となるように形成されており、突出部分がピッチ側ベース軌道台88と嵌合した状態で、ピッチ側ベース軌道台88の上方(基体2側)に配置されている。
【0077】
また、ピッチ側テーブル軌道台90の突出部分には、ピッチ側ベース転走面94と対向するピッチ側テーブル転走面98が形成されている。また、ピッチ側テーブル転走面98は、ピッチ側ベース転走面94と同様、ピッチ側テーブル転走面98の長さ方向から見たV溝で形成されている。
ピッチ側ベース転走面94とピッチ側テーブル転走面98との間には、図示しない複数の転動体(ボール)と、隣り合う転動体間の距離を維持する保持器(図示せず)が介装されている。
【0078】
(ロール側駆動部78の構成)
ロール側駆動部78は、図11中に示すように、ロール側駆動モータ100と、ロール側直動案内機構102を備えている。なお、図11は、ロール側駆動部78の構成を示す図であり、図11(a)は、図2のXI矢視図、図11(b)は、図11(a)のB線矢視図、図11(c)は、図11(a)のC線矢視図である。
ロール側駆動モータ100は、ロール側直動案内機構102を回転駆動可能なモータで形成されており、動作制御部22が出力する指令信号に基づいて駆動する。
【0079】
また、ロール側駆動モータ100は、ベース部下側プレート16の下面とピッチ側テーブル軌道台90の上面とを連結する連結フレーム104に取り付けられている。なお、連結フレーム104は、上面視で略Y字型に形成されており、その一辺は、車輪型ロボット1の前後方向に向いている。
ロール側直動案内機構102は、例えば、ボールねじ等の直動案内装置を用いて形成されており、連結フレーム104に取り付けられている。本実施形態では、ロール側直動案内機構102を、ねじ軸とナットを備えたボールねじを用いて形成した場合を説明する。
【0080】
ロール側直動案内機構102が備えるねじ軸は、その軸方向を、車輪型ロボット1の幅方向に向けており、ロール側駆動モータ100が駆動力を発生させると、この駆動力がプーリ及びベルトを介して伝達されて回転する。また、ねじ軸の外径面には、螺旋状に形成されたねじ軸側転走溝が形成されている。
また、ロール側直動案内機構102が備えるナットは、その内径面が、ねじ軸の外径面と対向している。なお、以降の説明では、ねじ軸の径方向から見て、ナットの中心がねじ軸の中心と重なっている状態を、中立状態と記載する場合がある。
【0081】
ナットの内径面には、ねじ軸側転走溝と対向するナット側転走溝が形成されており、ナットの外径面には、ロール側接続ロッド106の一端が取り付けられている。
ロール側接続ロッド106は、柱状部材であり、その他端には、円環状に形成されたロール側接続環84が固定されている。
そして、ねじ軸側転走溝とナット側転走溝との間に形成される転動体転走路には、複数の転動体が配置されており、ねじ軸が回転すると、複数の転動体の転動を介して、ナットがねじ軸の軸方向へ移動する。
【0082】
ここで、ロール側直動案内機構102は、ナットの移動方向(ねじ軸の軸方向)を、車輪型ロボット1の幅方向に向けている。また、上述したように、ロール側接続環84内には、ロール側接続ピン86が挿通されている。
また、上述したように、ロール側ベース転走面80及びロール側テーブル転走面82は、車輪型ロボット1の幅方向に沿って連続している。
【0083】
したがって、ロール側駆動部78が作動して、ロール側直動案内機構102が備えるナットが車輪型ロボット1の幅方向へ移動すると、ロール側ベース軌道台74とロール側テーブル軌道台76は、複数の転動体の転動を介して、図12中に示すように、上述した「x軸」の軸回り方向へ、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。なお、図12は、ロール側駆動部78の作動時における、ロール側案内機構70の動作状態を示す図であり、図12(a)は、中立状態におけるロール側案内機構70の動作状態を示す図、図12(b)は、ナットが、中立状態から左側駆動輪48L側へ移動した状態における、ロール側案内機構70の動作状態を示す図、図12(c)は、ナットが、中立状態から右側駆動輪48R側へ移動した状態における、ロール側案内機構70の動作状態を示す図である。
【0084】
(ピッチ側駆動部92の構成)
ピッチ側駆動部92は、ピッチ側駆動モータ(図示せず)と、ピッチ側直動案内機構(図示せず)を備えている。
なお、ピッチ側駆動部92の構成は、ピッチ側駆動モータ及びピッチ側直動案内機構が、移動部プレート46の上面に取り付けられている点と、ピッチ側直動案内機構が備えるねじ軸の軸方向及びナットの移動方向を、車輪型ロボット1の前後方向に向けている点を除き、上述したロール側駆動部78と同様であるため、その説明を省略する。
【0085】
したがって、ピッチ側駆動モータが作動して、ピッチ側直動案内機構が備えるねじ軸が回転すると、複数の転動体の転動を介して、ピッチ側直動案内機構が備えるナットが、車輪型ロボット1の前後方向に移動する。
ここで、上述したように、ピッチ側ベース転走面94及びピッチ側テーブル転走面98は、車輪型ロボット1の前後方向に沿って連続している。また、ピッチ側接続環(図示せず)内には、ピッチ側接続ピン96が挿通されている。なお、ピッチ側接続環の構成は、ロール側接続環84と同様である。
【0086】
したがって、ピッチ側駆動部92が作動して、ピッチ側直動案内機構が備えるナットが車輪型ロボット1の前後方向へ移動すると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90は、複数の転動体の転動を介して、図13中に示すように、上述した「y軸」の軸回り方向へ、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。なお、図13は、ピッチ側駆動部92の作動時における、ピッチ側案内機構72の動作状態を示す図であり、図13(a)は、中立状態におけるピッチ側案内機構72の動作状態を示す図、図13(b)は、ナットが、中立状態から車輪型ロボット1の前進方向へ移動した状態における、ピッチ側案内機構72の動作状態を示す図、図13(c)は、ナットが、中立状態から車輪型ロボット1の後退方向へ移動した状態における、ピッチ側案内機構72の動作状態を示す図である。
【0087】
(動作制御部22の詳細な構成)
以下、図1から図13を参照しつつ、図14から図17を用いて、動作制御部22の詳細な構成を説明する。
動作制御部22は、図14中に示すように、提供情報生成部108と、走行用モータ駆動制御部110と、基体傾斜角検出部112と、ロールピッチ機構駆動制御部114を備えている。なお、図14は、動作制御部22の詳細な構成を示すブロック図である。
【0088】
・提供情報生成部108の構成
提供情報生成部108は、第一距離センサ20と、第二距離センサ32と、前方撮影用カメラ34と、第三距離センサ36と、入力値検出部42と、移動モード切り換え操作部から、情報信号の入力を受け、情報提供部38へ出力する指令信号を生成する。
情報提供部38へ出力する指令信号は、例えば、車輪型ロボット1の進行方向や周辺に障害物等が存在している内容を示す音声や、車輪型ロボット1を後退させる内容を示す音声や、従動輪50または駆動輪48が脱輪した内容を示す音声を出力するための指令信号である。また、車輪型ロボット1の移動モードが案内移動モードである場合では、車輪型ロボット1の移動を開始する内容を示す音声や、目的地へ到着した内容を示す音声や、左右へ大きく旋回する内容を示す音声である。
なお、車輪型ロボット1の進行方向や周辺に障害物等が存在している状態は、例えば、第一距離センサ20、第二距離センサ32、前方撮影用カメラ34、第三距離センサ36から入力された情報信号に基づいて検出する。
【0089】
・走行用モータ駆動制御部110の構成
走行用モータ駆動制御部110は、第一距離センサ20と、第二距離センサ32と、前方撮影用カメラ34と、第三距離センサ36と、入力値検出部42と、路車間距離検出部54から、情報信号の入力を受け、走行用モータ52へ出力する指令信号を生成する。
走行用モータ52へ出力する指令信号は、入力値検出部42が検出した、被案内者による把持部40への入力に応じて、車輪型ロボット1の移動方向(前進・後退・左右への旋回)や、移動速度の変化等を指示するための指令信号である。
【0090】
具体的には、被案内者が把持部40を前方へ傾斜させる動作を行った場合、入力値検出部42が検出した入力の大きさに応じて、走行用モータ52の回転数を変化させる。また、被案内者が把持部40を右側または左側へ傾斜させる動作を行った場合、入力値検出部42が検出した入力の大きさに応じて、左側駆動輪48Lを駆動させる走行用モータ52と、右側駆動輪48Rを駆動させる走行用モータ52の回転数や回転方向を、個別に変化させる。
【0091】
また、車輪型ロボット1の進行方向や周辺に障害物等が存在している状態を検出すると、検出した障害物等との接触を回避するように、走行用モータ52の回転数や回転方向を変化させる。
また、走行用モータ駆動制御部110は、路車間距離検出部54から入力された情報信号に含まれている路車間距離を参照し、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えているか否かを判定する。そして、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えていると判定すると、走行用モータ52の動作を停止させる指令信号を、走行用モータ52へ出力する。なお、許容距離Arは、予め設定し、走行用モータ駆動制御部110に記憶させておく。
【0092】
以上により、走行用モータ駆動制御部110は、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離を超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御する。
また、上述した無励磁作動型ブレーキも、同様の方法で、動作制御部22から独立した回路により、制御される。
【0093】
・許容距離の設定
以下、図1から図14を参照しつつ、図15及び図16を用いて、許容距離の設定について説明する。なお、図15及び図16は、路車間距離検出部54と路面との位置関係を示す図である。
許容距離は、駆動輪48及び従動輪50の外径等に基づき、駆動輪48及び従動輪50が脱落しない幅の溝が路面に存在している状態に応じて算出した増加距離に基づいて設定する。
【0094】
具体的には、図15中に示す、路面に、駆動輪48及び従動輪50が脱落しない幅の溝62が存在する場合における、路車間距離検出部54と溝62の内壁面との距離を、許容距離Arとして設定する。
これにより、例えば、図16(a)中に示すように、路面が、車輪型ロボット1が走行面と同一面である場合、路車間距離検出部54は、許容距離Arを超えていない路車間距離を検出する。
また、例えば、図16(b)中に示すように、車輪型ロボット1の周辺に段差等が存在して、路面が、車輪型ロボット1が走行している面よりも低い場合、路車間距離検出部54は、許容距離Arを超えている路車間距離を検出する。
【0095】
次に、図1から図16を参照しつつ、図17を用いて、路車間距離検出部54が路車間距離を検出する方向を、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とした理由を説明する。なお、図17は、路車間距離検出部54と路面との位置関係を示す図である。
図17中に示すように、路面に、駆動輪48及び従動輪50が脱落しない幅の溝62が存在する場合、路車間距離検出部54が路車間距離を検出する方向を真下に設定、すなわち、車輪型ロボット1の側面視において、路車間距離検出部54から前方へ水平に延在する線から下方へ90[°]傾斜させた方向と設定すると、路車間距離検出部54は、溝62の底面を、路面として認識することとなる。このため、走行用モータ駆動制御部110は、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、路車間距離検出部54と溝62の底面との距離frが許容距離Arを超えていると判定することとなる。なお、図17中に示す溝62は、例えば、エレベータの乗降口に形成されている溝であり、駆動輪48及び従動輪50が脱落しない幅の溝である。
【0096】
これに対し、本実施形態のように、路車間距離検出部54が路車間距離を検出する方向を、上記の方向(45[°]傾斜させた方向)と設定することにより、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能となる。
【0097】
・基体傾斜角検出部112の構成
基体傾斜角検出部112は、予め、車輪型ロボット1を水平面上に載置した状態であり、ベース部下側プレート16と水平面が平行、すなわち、水平面に対するベース部下側プレート16の傾斜角度が「0[°]」である状態の、「x軸」の軸回りのモーメントと「y軸」の軸回りのモーメントを記憶させてある。
また、基体傾斜角検出部112は、三軸角度検出部26から情報信号の入力を受け、水平面を基準とした「x軸」の軸回りのモーメントを検出し、この検出した水平面に対する「x軸」の軸回りのモーメントの変化量を含む情報信号を、ロールピッチ機構駆動制御部114へ出力する。
【0098】
同様に、基体傾斜角検出部112は、三軸角度検出部26から情報信号の入力を受け、水平面を基準とした「y軸」の軸回りのモーメントを検出し、この検出した水平面に対する「y軸」の軸回りのモーメントの変化量を含む情報信号を、ロールピッチ機構駆動制御部114へ出力する。
以上により、基体傾斜角検出部112は、水平面に対する基体2の傾斜角度を検出する。
【0099】
・ロールピッチ機構駆動制御部114の構成
ロールピッチ機構駆動制御部114は、基体傾斜角検出部112から情報信号の入力を受け、ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号を生成する。
ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号は、基体傾斜角検出部112から入力された情報信号に基づき、水平面に対するベース部下側プレート16の傾斜角度を検出して生成する。
【0100】
具体的には、基体傾斜角検出部112から入力された情報信号に基づき、水平面に対する「x軸」及び「y軸」の軸回りのモーメントを検出して、水平面に対するベース部下側プレート16の傾斜角度を算出する。そして、算出したベース部下側プレート16の傾斜角度を、水平面に対する基体2の傾斜角度として参照し、水平面に対する基体2の傾斜角度が減少して、ベース部下側プレート16が水平面と平行になるような、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態(ナットの移動量)を算出する。
【0101】
さらに、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態を、ベース部下側プレート16が水平面と平行になるような動作状態とするために、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。そして、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
以上により、ロールピッチ機構駆動制御部114は、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78とピッチ側駆動部92の駆動状態を制御する。
【0102】
(動作)
以下、図1から図17を参照しつつ、図18から図22を用いて、本実施形態の車輪型ロボット1が行う動作について説明する。
車輪型ロボット1の使用時には、被案内者が、車輪型ロボット1の移動モードを、案内移動モードまたは自由移動モードに切り換え、把持部40を把持する。
このとき、走行用モータ駆動制御部110は、車輪型ロボット1の移動方向や移動速度が、被案内者による把持部40への入力に応じた値となるように、二つの走行用モータ52の回転数や回転方向を変化させる指令信号を生成して、走行用モータ52へ出力する。これにより、車輪型ロボット1は、被案内者による把持部40への入力に応じて走行(移動)する。
【0103】
・傾斜した路面の走行における動作
車輪型ロボット1が走行する路面(走行路)が傾斜した路面である場合、ロールピッチ機構駆動制御部114は、基体傾斜角検出部112から入力された情報信号に基づき、ベース部下側プレート16を水平面と平行にするための、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。さらに、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
【0104】
車輪型ロボット1が走行する路面が、上り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ピッチ側駆動モータ110を駆動させて、ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の前進方向へ移動させる(図13(b)参照)。
ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の前進方向へ移動させると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90は、複数の転動体の転動を介して、上述した「y軸」の軸回り方向へ、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。
【0105】
これにより、ピッチ側テーブル軌道台90に連結されている連結フレーム104を介して、ベース部下側プレート16が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って移動し、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図18中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、上り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図18は、上り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0106】
一方、車輪型ロボット1が走行する路面が、下り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ピッチ側駆動モータ110を駆動させて、ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の後退方向へ移動させる(図13(c)参照)。
ピッチ側直動案内機構112が備えるナットを、中立状態から車輪型ロボット1の後退方向へ移動させると、ピッチ側ベース軌道台88とピッチ側テーブル軌道台90が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って相対移動する。これにより、ベース部下側プレート16が、ピッチ側ベース転走面94及びピッチ側テーブル転走面98が形成する曲線軌道に沿って移動して、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
【0107】
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図19中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、下り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図19は、下り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0108】
また、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ロール側駆動モータ100を駆動させて、ロール側直動案内機構102が備えるナットを、中立状態から左側駆動輪48L側へ移動させる(図12(b)参照)。
ロール側直動案内機構102が備えるナットを、中立状態から左側駆動輪48L側へ移動させると、ロール側ベース軌道台74とロール側テーブル軌道台76は、複数の転動体の転動を介して、上述した「x軸」の軸回り方向へ、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。
【0109】
これにより、ロール側テーブル軌道台76に連結されている連結フレーム104を介して、ベース部下側プレート16が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って移動し、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図20中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図20は、車輪型ロボット1の左側から右側への上り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0110】
一方、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面である場合、ロールピッチ機構駆動制御部114は、ロール側駆動モータ100を駆動させて、ロール側直動案内機構102が備えるナットを、中立状態から右側駆動輪48R側へ移動させる(図12(c)参照)。
ロール側直動案内機構102が備えるナットを、中立状態から右側駆動輪48R側へ移動させると、ロール側ベース軌道台74とロール側テーブル軌道台76が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って相対移動する。これにより、ベース部下側プレート16が、ロール側ベース転走面80及びロール側テーブル転走面82が形成する曲線軌道に沿って移動して、ベース部下側プレート16の水平面に対する傾斜角度が減少する。
【0111】
そして、ベース部下側プレート16の水平面に対する傾斜角度が減少し、水平面と平行になると、図21中に示すように、基体2が水平面と平行になり、把持部40が水平となる。すなわち、車輪型ロボット1が走行する路面が、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面である場合であっても、被案内者が把持する把持部40を、水平に維持することが可能となる。なお、図21は、車輪型ロボット1の左側から右側への下り勾配で傾斜した路面を走行する車輪型ロボット1の状態を示す図である。
【0112】
・脱輪を防止する動作
車輪型ロボット1の走行中(移動中)には、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が許容距離Arを超えているか否かの判定を行う。そして、路車間距離が許容距離Arを超えていると判定すると、走行用モータ駆動制御部110は、走行用モータ52の動作を停止させる指令信号を生成し、走行用モータ52へ出力する。
動作を停止させる指令信号の入力を受けた走行用モータ52は、無励磁作動型ブレーキを作動させて、駆動輪48へ制動力を付与する。これにより、車輪型ロボット1の走行(移動)を停止させて、従動輪50や駆動輪48の脱輪を防止する。
【0113】
・脱輪時の動作
車輪型ロボット1の走行中に、従動輪50または駆動輪48が脱輪した場合、脱輪した車輪以外の車輪と滑落抑制部56により、車輪型ロボット1を支持して、滑落を抑制する。
なお、車輪型ロボット1の走行中に、従動輪50または駆動輪48が脱輪する状況とは、例えば、路車間距離検出部54の故障等により、路車間距離の検出が誤っている状況、走行用モータ52の故障等により、走行用モータ52の無励磁作動型ブレーキが正常に作動しなかった状況、走行用モータ52の無励磁作動型ブレーキが正常に作動したが、被案内者が車輪型ロボット1を押した状況等である。
【0114】
例えば、車輪型ロボット1の左旋回走行中に、左側に存在している段差に従動輪50が脱輪した場合、図22中に示すように、車輪型ロボット1の走行面から右側駆動輪48Rが離れた状態で、滑落抑制部56b及び滑落抑制部56dが、車輪型ロボット1の走行面と接触する。なお、図22は、車輪型ロボット1の走行時において、従動輪50が脱輪した後に滑落を抑制する状態を示す概略図であり、図22(a)は、車輪型ロボット1を上方から見た図、図22(b)は、図22(a)のB線矢視図、図22(c)は、図22(a)のC線矢視図である。
【0115】
これにより、移動部プレート46が走行面に接触していない状態で、左側駆動輪48Lと滑落抑制部56b及び滑落抑制部56dが走行面に接触することなり、車輪型ロボット1のうち、左側駆動輪48Lと滑落抑制部56b及び滑落抑制部56dを除く部分の損傷を防止するとともに、車輪型ロボット1を支持して、滑落を抑制する。
また、滑落抑制部56が備える滑落抑制板64の下面には、弾性材料を用いて形成された板状の滑り止め部材68が取り付けられているため、滑落抑制部56が走行面に接触すると、滑り止め部材68により、車輪型ロボット1の移動が抑制されて、滑落が抑制される。
なお、ロール側駆動部78とピッチ側駆動部92は、ロールピッチ機構6を駆動させるロールピッチ機構駆動部に対応している。
【0116】
(第一実施形態の効果)
以下、本実施形態の効果を列挙する。
(1)本実施形態の車輪型ロボット1では、ロールピッチ機構駆動制御部114が、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78及びピッチ側駆動部92の駆動状態を制御する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、水平面に対する基体2の傾斜角度が減少するように、平面視で直交する二つの軸回り方向である、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。
その結果、斜面の走行時において、基体2の傾斜を抑制することが可能となるため、被案内者が把持部40を把持することが困難な状況の発生を抑制することが可能となり、車輪型ロボット1の操作性を向上させることが可能となる。
【0117】
(2)本実施形態の車輪型ロボット1では、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように走行用モータ52の駆動状態を制御する。
このため、車輪型ロボット1の進行方向に段差等が存在していても、段差等に対して検出した路車間距離が予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御することが可能となる。
その結果、車輪型ロボット1の進行方向に段差等が存在していても、車輪の脱輪時における基体2の転倒を抑制することが可能となるため、車輪型ロボット1の使用時における安全性を向上させることが可能となる。
【0118】
(3)本実施形態の車輪型ロボット1では、ロールピッチ機構駆動制御部114が、基体傾斜角検出部112が検出した傾斜角度が減少するように、ロール側駆動部78及びピッチ側駆動部92の駆動状態を制御する。これに加え、走行用モータ駆動制御部110が、路車間距離検出部54が検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように走行用モータ52の駆動状態を制御する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、水平面に対する基体2の傾斜角度が減少するように、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。これに加え、車輪型ロボット1の進行方向に存在する段差等に対して検出した路車間距離が、予め設定した許容距離Arを超えていると判定すると、駆動輪48が停止するように、走行用モータ52の駆動状態を制御することが可能となる。
【0119】
その結果、斜面の走行時において、基体2の傾斜を抑制することが可能となるため、被案内者が把持部40を把持することが困難な状況の発生を抑制することが可能となる。これに加え、車輪型ロボット1の進行方向に段差等が存在していても、車輪の脱輪時における基体2の転倒を抑制することが可能となる
これにより、車輪型ロボット1の操作性を向上させることが可能となるとともに、車輪型ロボット1の使用時における安全性を向上させることが可能となる。
【0120】
(4)本実施形態の車輪型ロボット1では、ロールピッチ機構6が、基体2と移動部4とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って、相対移動可能に連結する。
このため、水平面に対して基体2が傾斜していても、基体2と移動部4とを、車輪型ロボット1の重心の変位を抑制するとともに、水平面に対する基体2の傾斜角度が減少するように、「x軸」及び「y軸」の軸回り方向へ相対移動させることが可能となる。
その結果、斜面の走行時における、車輪型ロボット1の安定性を向上させることが可能となるため、斜面の走行時における車輪型ロボット1の安全性を向上させることが可能となる。
【0121】
(5)本実施形態の車輪型ロボット1では、路車間距離検出部54が路車間距離を検出する検出方向を、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向とする。
このため、車輪が脱落せずに走行可能な溝等が、車輪型ロボット1の進行方向に存在している場合に、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能となる。
その結果、車輪が脱落せずに走行可能な溝等が、車輪型ロボット1の進行方向に存在している場合において、車輪型ロボット1の誤動作発生を抑制することが可能となるため、車輪型ロボット1の安定性を向上させることが可能となる。
【0122】
(6)本実施形態の車輪型ロボット1では、滑落抑制部56が、複数の車輪(左側駆動輪48L、右側駆動輪48、従動輪50)のうち少なくとも一つを除く車輪が路面から脱輪した状態で、路面と接触する。
このため、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、滑落抑制部56を路面と接触させることが可能となる。
その結果、複数の車輪のうち少なくとも一つを除く車輪が路面から脱輪した場合であっても、車輪型ロボット1のうち、少なくとも滑落抑制部56を除く部分の損傷を防止することが可能となる。
【0123】
(変形例)
以下、本実施形態の変形例を列挙する。
(1)本実施形態の車輪型ロボット1では、ロールピッチ機構6の構成を、基体2と移動部4とを、「x軸」及び「y軸」の軸回り方向へ曲線軌道に沿って相対移動可能に連結する構成としたが、ロールピッチ機構6の構成は、これに限定するものではない。すなわち、ロールピッチ機構6の構成を、例えば、ナットの移動方向を「x軸」に向けたボールねじと、ナットの移動方向を「y軸」に向けたボールねじと、ナットの移動方向を「z軸」に向けたボールねじを備える構成としてもよい。
【0124】
(2)本実施形態の車輪型ロボット1では、路車間距離検出部54が路車間距離を検出する方向を、路車間距離検出部54から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたが、路車間距離検出部54が路車間距離を検出する方向は、これに限定するものではない。すなわち、路車間距離検出部54が路車間距離を検出する方向を、例えば、路車間距離検出部54から前方へ水平に延在する線から下方へ60[°]から15[°]までの範囲内で任意に傾斜させた方向としてもよい。要は、路車間距離検出部54が路車間距離を検出する方向は、駆動輪48及び従動輪50が脱落しない幅の溝62が存在している場合であっても、走行用モータ駆動制御部110が、路車間距離が許容距離Arを超えていると誤判定することを、防止することが可能な方向であればよい。
【0125】
(3)本実施形態の車輪型ロボット1では、移動部プレート46の下面に、七個の滑落抑制部56a〜56gを取り付けたが、脱輪した車輪型ロボット1の滑落が抑制可能であれば、滑落抑制部56の個数・形状は限定するものではない。
(4)本実施形態の車輪型ロボット1では、路車間距離検出部54が、車輪型ロボット1の前方のみに対し、路車間距離を検出するが、路車間距離検出部54の構成は、これに限定するものではない。すなわち、路車間距離検出部54が、路車間距離を検出する方向は、車輪型ロボット1の前方に加え、車輪型ロボット1の後方や側方としてもよい。
(5)本実施形態の車輪型ロボット1では、三軸角度検出部26を、ベース部下側プレート16に取り付けたが、これに限定するものではなく、三軸角度検出部26を、移動部プレート46に取り付けてもよい。
【0126】
(第二実施形態)
以下、本発明の第二実施形態(以下、「本実施形態」と記載する)について、図面を参照しつつ説明する。
(構成)
まず、図1から図22を参照しつつ、図23から図28を用いて、本実施形態の車輪型ロボット1の構成を説明する。なお、図中及び以降の説明では、上述した第一実施形態と同様の構成について、同一の符合を付して示す。
本実施形態の車輪型ロボット1の構成は、動作制御部22と、把持部40の構成を除き、上述した第一実施形態と同様であるため、以降の説明は、動作制御部22及び把持部40を中心に行なう。また、以降の説明では、上述した第一実施形態と同様の構成について、説明を省略する場合がある。
【0127】
(把持部40の構成)
図23は、本実施形態の車輪型ロボット1が備える把持部40の構成を示す図であり、把持部40を上方から見た斜視図である。
本実施形態の把持部40は、上述した第一実施形態と同様、車輪型ロボット1を使用する被案内者が、車輪型ロボット1の使用時に手で把持する部分であり、入力値検出部42を介して、延在部30bの上面に取り付けられている。
また、把持部40は、近接覚センサ120と、把持部カバー122を備えている。
【0128】
近接覚センサ120は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手の位置を検出する。そして、近接覚センサ120は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手の位置を検出すると、この検出した位置を含む情報信号を、動作制御部22へ出力する。
また、近接覚センサ120は、複数のリング状センサと、基台124と、検知処理部(図示せず)を備えている。なお、本実施形態では、一例として、近接覚センサ120が、二つのリング状センサ(以降の説明及び図中では、第1リング状センサRS1、第2リング状センサRS2と記載する場合がある)を備えている場合を説明する。
【0129】
第1リング状センサRS1は、互いに並列に接続されており、等間隔で円環状に配置された複数の第1光センサ素子OSE1を有している。なお、本実施形態では、一例として、第1リング状センサRS1が、12個の第1光センサ素子OSE1を有している場合を説明する。
各第1光センサ素子OSE1は、フォトリフレクタセンサを用いて形成されている。フォトリフレクタセンサは、フォトリフレクタセンサ自身から出力される赤外線の反射光を読み取るセンサであり、フォトリフレクタセンサによって読みとられた反射光の強度は、アナログ値、または、デジタル値として出力される。そして、フォトリフレクタセンサから出射された赤外線が被案内者の手等で反射すると、その反射光は、フォトリフレクタセンサで受光される。
【0130】
第2リング状センサRS2は、第1リング状センサRS1と同様、互いに並列に接続されており、等間隔で円環状に配置された複数の第2光センサ素子OSE2を有している。なお、本実施形態では、一例として、第1リング状センサRS1と同様、第2リング状センサRS2が、12個の第2光センサ素子OSE2を有している場合を説明する。
また、円環状に配置された複数の第2光センサ素子OSE2で形成される円の外径は、円環状に配置された複数の第1光センサ素子OSE1で形成される円の外径よりも大きい。
【0131】
また、第2リング状センサRS2は、一つの第1光センサ素子OSE1の下方に一つの第2光センサ素子OSE2を配置した状態で、第1リング状センサRS1の下方に配置されている。さらに、第2リング状センサRS2は、複数の第2光センサ素子OSE2で形成される円の中心軸と複数の第1光センサ素子OSE1で形成される円の中心軸とを同軸として、第1リング状センサRS1の下方に配置されている。
【0132】
基台124は、円板状に形成されており、上側の面に、第1リング状センサRS1及び第2リング状センサRS2が取り付けられている。
また、基台124の下側の面には、図示しない突起部分が形成されており、この突起部分を介して、把持部40は入力値検出部42に取り付けられている。
検知処理部の説明は、後述する。
【0133】
把持部カバー122は、上面視で略円形であるとともに、側面視で略楕円形に形成されている。
また、把持部カバー122は、基台124の上側の面に取り付けられた状態の第1リング状センサRS1及び第2リング状センサRS2を、上方及び側方から覆うように、基台124に取り付けられている。
【0134】
また、把持部カバー122の外径面のうち、車輪型ロボット1の前進方向及び側方には、上述した第一実施形態と同様、複数個所の凹部44が設けられている。
凹部44は、片手の指よりも多く設ける。本実施形態では、一例として、凹部44を7箇所設ける場合を説明する。
また、把持部カバー122には、複数の孔部126が形成されている。
【0135】
各孔部126は、フォトリフレクタセンサから出射された赤外線が出射可能であるとともに、出射されて被案内者の手等で反射した反射光が入射可能な形状及び位置に配置されている。したがって、本実施形態では、把持部カバー122に24箇所の孔部126を形成した場合を説明する。
また、把持部カバー122の上面には、予め設定した案内用ロボット1の移動方向を示す位置に形状に形成した方向指示用突起部128が設けられている。
【0136】
本実施形態では、一例として、予め設定した案内用ロボット1の移動方向を、案内用ロボット1の前進方向とした場合を説明する。
具体的には、方向指示用突起部128は、把持部カバー122の上面において、案内用ロボット1の後退方向から前進方向へ向けて二等辺間の幅が縮小する二等辺三角形の形状に形成されている。
【0137】
[近接覚センサ120の作動原理]
以下、図1から図23を参照しつつ、図24を用いて、近接覚センサ120の作動原理を説明する。
図24は、図23中に示した近接覚センサ120が被案内者の手を検知する際の座標と、この座標が求められる原理とを説明するための図である。具体的には、図24(a)は、図23に示した近接覚センサ120が被案内者の手Hを検知する際の座標を説明するための図であり、図24(b)は、上記の座標が第1リング状センサRS1及び第2リング状センサRS2によって検知できることを説明するための図である。
【0138】
なお、図24(a)、(b)中に示した「o」は、いずれも第1リング状センサRS1によって形成される円環の中心点、第2リング状センサRS2によって形成される円環の中心点を示す。また、中心点oは、第1リング状センサRS1と第2リング状センサRS2とで一致しているため、近接覚センサ120によって検出される座標は、この中心点oを中心にして定められる。
【0139】
図24(a)中に示すように、近接覚センサ1は、被案内者の手Hからの反射光量の重心を、角度(以下、方位角と記す)「φ」、角度(以下、仰角と記す)「θ」、反射光強度「P」の三つの要素で表し、被案内者の手Hの位置を示す。なお、以降の説明及び図中では、3つの要素を、(φ、θ、P)と記載する場合がある。また、以降の説明では、上記のような座標を、「球座標」と記載する場合がある。
また、図24(a)中では、第1リング状センサRS1及び第2リング状センサRS2は、それぞれがx軸を有している。
【0140】
x軸には、第1リング状センサRS1のx軸1と、第2リング状センサRS2のx軸2とがあり、x軸1とx軸2とが90度の角度をなしているのは、第1リング状センサRS1と第2リング状センサRS2とが、その方位角φが90度の角度をなすように、基台124に取り付けられているためである。このような第1リング状センサRS1と第2リング状センサRS2との配置を、以降の説明では、「リング状センサの位相が90度ずれている」と記載する場合がある。
【0141】
また、図24(b)中に示すように、高さが異なるように基台124に取り付けられている第1リング状センサRS1と第2リング状センサRS2は、その赤外線の出射、入射の仰角θの範囲が相違する。
なお、図24(b)中では、第1光センサ素子OSE1の出射、入射の仰角範囲を範囲Bで示し、第2光センサ素子OSE2の出射、入射の仰角範囲を範囲Cで示している。図また、24(b)中に示した範囲Dは、範囲Bと範囲Cとが重なる部分であり、近接覚センサ1が被案内者の手Hを検知可能な範囲である。
第1リング状センサRS1と第2リング状センサRS2は、赤外線の出射、入射の範囲の相違により、被案内者の手Hに対する仰角θが相違する。このため、第1リング状センサRS1と第2リング状センサRS2の取り付け位置、または、取り付け角度の相違によって、被案内者の手Hの方位角φ、仰角θを検知することが可能である。
【0142】
[リング状センサ(第1リング状センサRS1と第2リング状センサRS2)の回路構成]
以下、図1から図24を参照しつつ、図25を用いて、第1リング状センサRS1及び第2リング状センサRS2の回路構成を説明する。
図25は、第1リング状センサRS1の回路構成を説明するための図である。なお、第2リング状センサRS2の構成は、第1リング状センサRS1と同様であるため、第2リング状センサRS2は、その回路構成の図示及び説明を省略する。
【0143】
なお、図25中に示した第1リング状センサRS1は、m×n個のセンサ素子が2次元に分布する既存のセンサの、mまたはnを1個としたものと等価である。このため、近接覚センサ120は、1次元の近接覚センサということができる。これにより、本実施形態の近接覚センサ120は、1次元の近接覚センサを用いて構成されることとなるため、比較的簡易な演算処理によって、被案内者の手Hの位置を極座標で表すことが可能となる。
【0144】
第1リング状センサRS1は、複数の第1光センサ素子によって構成されている。なお、図25中では、説明のために、第1光センサ素子OSE1を、第1光センサ素子311〜316と示す。
すなわち、第1リング状センサRS1は、第1光センサ素子311a〜316aと、311b〜316b(以降の説明では、第1光センサ素子311a、311b〜316a、316bと記載する場合がある。)を備えている。
【0145】
上述したように、第1光センサ素子311a、311b〜316a、316bは、いずれもフォトリフレクタセンサを用いて形成されており、フォトリフレクタセンサは、その抵抗値が反射光の強度によって変化する可変抵抗素子である。また、本実施形態では、可変抵抗素子としてフォトトランジスタを使用する。フォトトランジスタでは、反射光の強度によってエミッタ、コレクタ間の抵抗値が変化する。
【0146】
また、第1リング状センサRS1においては、第1光センサ素子316bと第1光センサ素子311aとの間に、抵抗値が一定の抵抗素子321aが接続されている。また、第1光センサ素子311bと第1光センサ素子312aとの間に抵抗素子321bが、第1光センサ素子312bと第1光センサ素子313aとの間に抵抗素子321cが、第1光センサ素子313bと第1光センサ素子314aとの間に抵抗素子321dが、第1光センサ素子314bと第1光センサ素子315aとの間に抵抗素子321eが、第1光センサ素子315bと第1光センサ素子316aとの間に抵抗素子321fがそれぞれ接続されている。
【0147】
さらに、抵抗素子321gは第1光センサ素子316bと直列に接続され、抵抗素子321hは第1光センサ素子316aと直列に接続される。以上の第1光センサ素子311a、316a〜311b、316bと、抵抗素子321a〜321hとは、図示しない電源の電源端子331と基準電圧(GND)端子332との間に接続されている。
また、直列に接続される抵抗素子321a〜321fの一端を第1リング状センサRS1の一方の端子301とし、他方の一端を端子302とする。さらに、端子301から出力される電圧の電圧値をV1とし、端子302から出力される電圧の電圧値をV2とする。
【0148】
[検知処理部の構成]
以下、図1から図25を参照しつつ、図26及び図27を用いて、検知処理部340の構成を説明する。
検知処理部340は、第1リング状センサRS1及び第2リング状センサRS2に接続されており、第1リング状センサRS1及び第2リング状センサRS2から入力された電圧値V1及び電圧値V2に基づき、被案内者の手Hの座標を算出する処理を行う。
検知処理部340が被案内者の手Hの座標を算出する処理では、方位角φ及び仰角θのうち少なくとも一方を用いる。これに加え、検知処理部340が被案内者の手Hの座標を算出する処理では、反射光強度Pを用いる場合もある。
【0149】
以下、方位角φ、仰角θ及び反射光強度Pを算出する処理について説明する。
すなわち、検知処理部340は、基台124に固定された状態の第1リング状センサRS1及び第2リング状センサRS2から出力された電圧を演算処理し、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する。
【0150】
・方位角φを算出する処理
図25中に示した、第1リング状センサRS1を流れる全電流Iall1は、以下の式(1)によって求められる。
Iall1=a(V1+V2) … (1)
また、全電流Iall1の分布のx軸まわりの一次モーメントIx1は、以下の式(2)によって求められる。
Ix1=b(V1−V2) … (2)
なお、上記の式(1)及び(2)中における「a」と「b」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0151】
上記の式(1)、(2)から、第1リング状センサRS1の各第1光センサ素子311a〜316a、311b〜316bに流れる電流の分布の中心位置を示す座標xc1が、以下の式(3)によって求められる。なお、電流分布の中心を示す座標がx座標だけで表されるのは、上述したように、近接覚センサ120が、光センサ素子(第1光センサ素子、第2光センサ素子)を一次元に配置した構成を有するためである。
xc1=Ix/Iall1 … (3)
【0152】
図26は、第1リング状センサRS1及び第2リング状センサRS2を基台124に取り付けた状態を示す模式図である。具体的には、図26(a)は、基台124に取り付けた状態の第1リング状センサRS1を示し、図26(b)は、第1リング状センサRS1と位相が90度ずれた状態で基台124に取り付けた状態の第2リング状センサRS2を示している。なお、図26(b)中には、第2リング状センサRS2が備える第2光センサ素子に対し、対応する第1光センサ素子と同じ数字及び英字の符合を付した上で、さらに、記号「’」を付している。
【0153】
図26(a)及び(b)中に示すように、第1リング状センサRS1と第2リング状センサRS2の位相が90度ずれた状態とは、第1リング状センサRS1のx軸(図26(a)中に示す「x1」、以降の説明では、「第1x軸x1」と記載する場合がある)と、第2リング状センサRS2のx軸(図26(b)中に示す「x2」、以降の説明では、「第2x軸x2」と記載する場合がある)とが、90度の角度をなす状態を示す。
【0154】
なお、本実施形態では、第1リング状センサRS1を基台124に固定した状態において、第1光センサ素子316aと第1光センサ素子316bとを結んだ直線の延長線を、第1x軸x1とする。これに伴い、本実施形態では、第2リング状センサRS2を基台124に固定した状態において、第2光センサ素子316a’と第2光センサ素子316b’とを結んだ直線の延長線を、第2x軸x2とする。
【0155】
そして、第1x軸x1では、第1光センサ素子316aと第1光センサ素子316bとを結んだ直線を二等分する点を、中心点oとする。同様に第2x軸x2では、第2光センサ素子316a’と第2光センサ素子316b’とを結んだ直線を二等分する点を、中心点oとする。
また、図26(a)中に破線で示した円c1は、第1光センサ素子311a、311b〜316a、316bが、全て中心点oから等しい距離にあることを示すための仮想的な線である。同様に、図26(b)中に破線で示した円c1’は、第2光センサ素子311a’、311b’〜316a’、316b’が、全て中心点oから等しい距離にあることを示すための仮想的な線である。
【0156】
また、図26(a)及び(b)中に破線で示した円c2は、近接覚センサ120によって被案内者の手Hが検知される範囲を示す。
図27は、図26に示したx座標と実際の方位角φとの対応を示した表である。具体的には、図27(a)は、図26(a)中に示す第1リング状センサRS1で検出されたx座標xc1を方位角φに変換するためのグラフであり、図27(b)は、図26(b)中に示す第2リング状センサRS2で検出されたx座標xc2を方位角φに変換するためのグラフである。
【0157】
図27(a)、(b)のいずれにおいても、縦軸はx座標xc1またはx座標xc2を示し、横軸は方位角φを示す。図27(a)によれば、x座標xc1が「1」であるとき方位角は0度であり、x座標xc1が「−1」であるとき方位角は180度であることが分かる。また、図27(b)によれば、x座標xc2が「1」であるとき方位角は90度であり、x座標xc2が「−1」であるとき方位角は270度であることが分かる。
【0158】
また、図24(a)中に示したように、x座標xc1はcos(φ)に相当し、x座標xc2はsin(φ)に相当する。このため、方位角φは、以下の式(4)によって求められる。
φ=atan2(xc2,xc1) … (4)
以上説明したように、検知処理部340が方位角φを算出する処理は、第1リング状センサRS1から出力された電圧を、第1リング状センサRS1の中心点oに対する被案内者の手Hの方位角である方位角φの余弦成分cosφに変換し、第1リング状センサRS1から出力された電圧を方位角φの正弦成分sinφに変換し、cosφとsinφとから、方位角φを算出するものである。
【0159】
・仰角θを算出する処理
第2リング状センサRS2を流れる全電流Iall2は、上記の式(1)により、全電流Iall1と同様に求められる。
したがって、検知処理部340は、全電流Iall1と全電流Iall2を用い、以下の式(5)によって、第1リング状センサRS1及び第2リング状センサRS2に対する被案内者の手Hの仰角θを算出する。
θ=c(Iall1−Iall2)/(Iall1+Iall2)+d … (5)
なお、上記の式(5)中における「c」と「d」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0160】
上記の式(5)において、(Iall1−Iall2)は、第1リング状センサRS1と被案内者の手Hとの距離と、第2リング状センサRS2と被案内者の手Hとの距離との差に関係する量を示す。
以上説明したように、検知処理部340が仰角θを算出する処理は、(Iall1−Iall2)を(Iall1+Iall2)で除算することにより、被案内者の手Hの反射率に依存しない無次元量として、第1リング状センサRS1及び第2リング状センサRS2の中心点oと被案内者の手Hとの距離を扱って求めることが可能である。
【0161】
・反射光強度Pを算出する処理
第1リング状センサRS1及び第2リング状センサRS2によって受光される反射光強度Pは、以下の式(6)によって求められる。
P=e(Iall1+Iall2) … (6)
なお、式(6)中における「e」は、近接覚センサ120の特性等に応じて適宜設定される定数である。
【0162】
[近接覚センサ120が実施可能な他の処理]
近接覚センサ120は、被案内者の手Hの反射率pが既知である場合、以下の式(7)によって、第1リング状センサRS1及び第2リング状センサRS2の中心点oと被案内者の手Hとの距離rを算出することが可能である。
r= f・sqrt(p) … (7)
なお、式(7)中における「f」は、被案内者の手Hの材質や表面状態等によって決定される定数である。また、式(7)中における「sqrt」は、スクエアルートを示す。
なお、中心点oと被案内者の手Hとの距離rは、式(7)によって求められるものに限定されるものでなく、例えば、変換テーブルによって実測値を変換して求めることもできる。
【0163】
(動作制御部22の構成)
以下、図1から図27を参照しつつ、図28を用いて、動作制御部22の構成を説明する。
動作制御部22は、図28中に示すように、提供情報生成部108と、走行用モータ駆動制御部110と、基体傾斜角検出部112と、ロールピッチ機構駆動制御部114と、手掌位置検出部130と、把持部位置変化機構駆動制御部132を備えている。なお、図28は、動作制御部22の詳細な構成を示すブロック図である。
提供情報生成部108、走行用モータ駆動制御部110、基体傾斜角検出部112及びロールピッチ機構駆動制御部114の構成は、上述した第一実施形態と同様であるため、その説明を省略する。
【0164】
・手掌位置検出部130の構成
手掌位置検出部130は、近接覚センサ120から情報信号の入力を受け、把持部位置変化機構駆動制御部132へ出力する情報信号を生成し、この生成した情報信号を把持部位置変化機構駆動制御部132へ出力する。
すなわち、手掌位置検出部130は、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出し、この検出した被案内者の手Hの位置を示す情報信号を生成して出力する。
【0165】
・把持部位置変化機構駆動制御部132の構成
把持部位置変化機構駆動制御部132は、手掌位置検出部130から情報信号の入力を受け、ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号を生成する。
ロール側駆動モータ100及びピッチ側駆動モータ110へ出力する指令信号は、手掌位置検出部130から入力された情報信号に基づき、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置を算出して生成する。
【0166】
具体的には、手掌位置検出部130から入力された情報信号に基づき、把持部40(把持部40の上面の中心)を基準とした被案内者の手Hの位置に対応する方位角φ及び仰角θを算出する。ここで、方位角φは、車輪型ロボット1の前進方向を「0」として算出する。また、仰角θは、把持部40の上面の中心を基準とした鉛直上方を「0」として算出する。
【0167】
そして、算出した方位角φ及び仰角θから、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置を、X軸方向(車輪型ロボット1の前後方向)成分と、Y軸方向(車輪型ロボット1の左右方向)成分に分離する。
上記のX軸方向成分は以下の式(8)によって算出する。
dx=θcosφ … (8)
なお、式(8)中における「dx」は、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置の、車輪型ロボット1の前後方向への偏差(ずれ量)である。
【0168】
また、上記のY軸方向成分は以下の式(9)によって算出する。
dy=θsinφ … (9)
なお、式(9)中における「dy」は、被案内者が把持部40を把持していない状態における、把持部40に対する被案内者の手Hの位置の、車輪型ロボット1の左右方向への偏差(ずれ量)である。
【0169】
そして、把持部位置変化機構駆動制御部132は、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するような、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態(ナットの移動量)を算出する。
さらに、把持部位置変化機構駆動制御部132は、ロール側直動案内機構102及びピッチ側直動案内機構112のうち少なくとも一方の動作状態を、被案内者の手Hの下方へ把持部40が移動するような動作状態とするために、ロール側駆動モータ100及びピッチ側駆動モータ110のうち少なくとも一方の駆動状態を算出する。そして、この算出した駆動状態を実施させるための指令信号を生成し、ロール側駆動モータ100及びピッチ側駆動モータ110のうち、該当するモータへ出力する。
【0170】
以上により、把持部位置変化機構駆動制御部132は、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、ロール側駆動部78とピッチ側駆動部92の駆動状態を制御する。
また、上述したように、ロールピッチ機構6(ロール側案内機構70、ピッチ側案内機構72)は、移動部4に対して把持部40の位置を変化させる把持部位置変化機構に対応している。
また、上述したように、ロール側駆動部78とピッチ側駆動部92は、把持部位置変化機構(ロールピッチ機構6)を駆動させる把持部位置変化機構駆動部に対応している。
【0171】
(動作)
以下、図1から図28を用いて、本実施形態の車輪型ロボット1が行う動作について説明する。
【0172】
車輪型ロボット1の使用時には、被案内者が、車輪型ロボット1の移動モードを、案内移動モードまたは自由移動モードに切り換え、把持部40を把持する。
このとき、被案内者は、把持部40を把持するために、手Hを把持部40へ近づける動作を行なう。しかしながら、例えば、被案内者の視覚が弱い場合等には、被案内者が、確実に把持部40を把持することが困難である状況が発生する。
【0173】
これに対し、本実施形態の車輪型ロボット1では、手掌位置検出部130が、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出する。これに加え、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御する。
【0174】
このため、被案内者の手Hが把持部40から離れていても、被案内者が把持部40に手を近づけると、移動部4の位置を変化させず、被案内者の手Hの下方へ把持部40が移動するように、移動部4に対して把持部40の位置を変化させることが可能となる。
これにより、車輪型ロボット1を使用する被案内者は、把持部40の視認が困難な状況であっても、手Hの下方に移動した把持部40を把持することが容易となる。
【0175】
(第二実施形態の効果)
以下、本実施形態の効果を列挙する。
(1)本実施形態の車輪型ロボット1では、手掌位置検出部130が、被案内者が把持部40を把持していない状態で、把持部40に対する被案内者の手Hの位置を検出する。これに加え、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御する。
【0176】
このため、車輪型ロボット1の使用時に、被案内者の手Hが把持部40から離れていても、被案内者が把持部40に手を近づけると、移動部4の位置を変化させず、被案内者の手Hの下方へ把持部40が移動するように、移動部4に対して把持部40の位置を変化させることが可能となる。
その結果、車輪型ロボット1の使用時に、被案内者の手Hが把持部40から離れていても、被案内者が把持部40を把持するために手を移動させる距離を短縮することが可能となる。
【0177】
(2)本実施形態の車輪型ロボット1では、手掌位置検出部130が有する近接覚センサ120が、第1リング状センサRS1と第2リング状センサRS2とを、第1光センサ素子OSE1と第2光センサ素子OSE2とが互いに90度の角度をなし、且つ第1光センサ素子OSE1が第2光センサ素子OSE2よりも上に位置するように固定する基台124を備える。これに加え、近接覚センサ120が、基台124に固定された状態の第1リング状センサRS1及び第2リング状センサRS2から出力された電圧を演算処理し、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する検知処理部340を備える。
【0178】
このため、第1リング状センサRS1及び第2リング状センサRS2に対する被案内者の手Hの位置を、第1リング状センサRS1と第2リング状センサRS2を基準とした方位角及び仰角のうち少なくとも一方に基づいて検知することが可能となるため、把持部40に対する被案内者の手Hの位置を検出することが可能となる。
その結果、把持部位置変化機構駆動制御部132が、被案内者の手Hの下方へ把持部40を移動させる際に行なう制御の精度を向上させることが可能となる。
また、把持部位置変化機構駆動制御部132に対して、近接覚センサ120によって検出された球座標をダイレクトに出力することが可能となる。これにより、把持部位置変化機構駆動制御部132が行なう制御に関する構成を簡易化、小型化することに有利となる。
【0179】
(変形例)
以下、本実施形態の変形例を列挙する。
(1)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、方位角φ及び仰角θのうち少なくとも一方に基づいて、被案内者の手Hの位置を検知する近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、所定の抵抗値を有する抵抗素子等で接続した一組のノードからなるノードペアをマトリックス状に配置して形成した二次元平面状のセンサを備え、二次元平面状のセンサから出力された情報であり、仰角θを含んでいない情報を用いて、被案内者の手Hの位置を検知する構成としてもよい。
【0180】
(2)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、把持部40の周辺を撮像可能なカメラを有する構成とし、カメラで撮像した画像から肌色の部分を抽出して、この抽出した部分を用いて被案内者の手Hの位置を検知する構成としてもよい。この場合、カメラで撮像した画像から抽出した肌色の部分を、検知処理部340で行なう処理に用い、被案内者の手Hの位置を検知する処理を補正する構成としてもよい。
すなわち、車輪型ロボット1の構成を、被案内者の手Hを撮像可能な手掌撮像部(カメラ)を備える構成とし、手掌位置検出部130の構成を、手掌撮像部が撮像した被案内者の手Hの画像を用いて、把持部40に対する被案内者の手Hの位置を検出する構成としてもよい。
【0181】
(3)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、手掌位置検出部130の構成を、把持部40の周辺の温度を感知可能な熱感知センサを有する構成とし、熱感知センサで感知した熱の位置を用いて、被案内者の手Hの位置を検知する構成としてもよい。この場合、熱感知センサで感知した熱の位置を、検知処理部340で行なう処理に用い、被案内者の手Hの位置を検知する処理を補正する構成としてもよい。
【0182】
(4)本実施形態の車輪型ロボット1では、移動部4に対して把持部40の位置を変化させる把持部位置変化機構を、ロールピッチ機構6により形成したが、把持部位置変化機構の構成は、これに限定するものではない。すなわち、把持部位置変化機構を、例えば、ナットの移動方向を「x軸」(例えば、図4参照)に向けたボールねじと、ナットの移動方向を「y軸」(例えば、図4参照)に向けたボールねじを備える構成としてもよい。この場合、例えば、入力値検出部42及び把持部40を、移動部4に対して「x軸」及び「y軸」へ移動可能な構成としてもよい。
【0183】
すなわち、把持部位置変化機構の構成を、移動部4に対する把持部40の位置を、平面視で直交する二つの軸方向へ変化させる構成としてもよい。
これに加え、さらに、把持部位置変化機構を、ナットの移動方向を「z軸」(例えば、図4参照)に向けたボールねじを備える構成としてもよい。
この場合、ナットの移動方向を「z軸」に向けたボールねじを、例えば、基体タワー部10に備える構成とし、さらに、基体タワー部10の構成を、上下方向に二分割した構成とする。そして、把持部位置変化機構駆動制御部132は、被案内者の手Hの下方へ把持部40を移動させる制御を行なった後、さらに、基体タワー部10のうち二分割した上側の部分を上昇させて、把持部40を、被案内者の手Hが接触するまで上昇させる制御を行なってもよい。なお、このような制御は、把持部位置変化機構をロールピッチ機構6により形成した場合にも適用可能である。
【0184】
すなわち、把持部位置変化機構の構成を、移動部4に対する把持部40の高さ位置を変化させる把持部高さ位置変化機構と、把持部高さ位置変化機構を駆動させる把持部高さ位置変化機構駆動部を備える構成とする。これに加え、把持部位置変化機構駆動制御部132の構成を、手掌位置検出部130が位置を検出した被案内者の手Hと把持部40が接触するように、把持部高さ位置変化機構駆動部の駆動状態を制御する構成とする。
【0185】
(5)本実施形態の車輪型ロボット1では、把持部位置変化機構駆動制御部132が、手掌位置検出部130が位置を検出した被案内者の手Hの下方へ把持部40が移動するように、把持部位置変化機構駆動部の駆動状態を制御するが、これに限定するものではない。すなわち、例えば、入力値検出部42が動作制御部22へ出力した情報信号に基づき、被案内者の手Hと把持部40との接触を検出する。そして、被案内者の手Hと把持部40との接触を検出すると、把持部位置変化機構駆動部の駆動状態を制御して、移動部4に対する把持部40の位置が初期位置となるように、把持部位置変化機構駆動部の駆動状態を制御してもよい。なお、このような制御は、把持部位置変化機構を、移動部4に対して把持部40を「x軸」及び「y軸」へ移動可能な構成とした場合にも適用可能である。
【0186】
すなわち、車輪型ロボット1の構成を、被案内者による把持部40への入力を検出する入力値検出部42を備える構成とし、手掌位置検出部130の構成を、入力値検出部42が被案内者による把持部40への入力を検出すると、把持部40に対する被案内者の手Hの位置の検出を停止する構成とする。これに加え、把持部位置変化機構駆動制御部132の構成を、手掌位置検出部130が把持部40に対する被案内者の手Hの位置の検出を停止すると、移動部4に対する把持部40の位置が初期位置となるように、把持部位置変化機構駆動部の駆動状態を制御する構成とする。
【0187】
(6)本実施形態の車輪型ロボット1では、手掌位置検出部130の構成を、上述した近接覚センサ120を有する構成としたが、手掌位置検出部130の構成は、これに限定するものではない。すなわち、例えば、被案内者の手Hの表面に、手Hの表面よりも光の反射率が高い反射マーカー部が配置されている場合は、手掌位置検出部130の構成を、反射マーカー部で反射した光であるマーカー反射光を検出する反射光検出部を備え、反射光検出部が検出したマーカー反射光を用いて、把持部40に対する被案内者の手Hの位置を検出する構成としてもよい。なお、反射マーカー部としては、例えば、再帰性反射マーカーやカラーマーカーを塗布した手袋や、手Hや指に装着可能なゴムバンド等を用いることが可能である。
【0188】
(7)本実施形態の車輪型ロボット1では、1つのリング状センサがセンサ素子を12個備える構成としたが、これに限定するものではない。すなわち、例えば、リング状センサは任意の数(例えば6個)のセンサ素子を備えるものであってもよい。また、抵抗素子321a〜321fが2つのセンサ素子を挟んで設けられる構成に限定されるものではなく、センサ素子の間の任意の位置に設けられるものであってもよい。
【符号の説明】
【0189】
1 車輪型ロボット
2 基体
4 移動部
6 ロールピッチ機構
8 基体ベース部
10 基体タワー部
12 ベースカバー部材
14 ベース部上側プレート
16 ベース部下側プレート
18 タワーカバー部材
20 第一距離センサ
22 動作制御部
24 プレート連結部材
26 三軸角度検出部
28 タワーフレーム部
30 グリップ支持部
32 第二距離センサ
34 前方撮影用カメラ
36 第三距離センサ
38 情報提供部
40 把持部
42 入力値検出部
44 凹部
46 移動部プレート
48 駆動輪
50 従動輪
52 走行用モータ
54 路車間距離検出部
56 滑落抑制部
58 駆動輪用ブラケット
60 回動部材
62 溝
64 滑落抑制板
66 抑制板取付け部
68 滑り止め部材
70 ロール側案内機構
72 ピッチ側案内機構
74 ロール側ベース軌道台
76 ロール側テーブル軌道台
78 ロール側駆動部
80 ロール側ベース転走面
82 ロール側テーブル転走面
84 ロール側接続環
86 ロール側接続ピン
88 ピッチ側ベース軌道台
90 ピッチ側テーブル軌道台
92 ピッチ側駆動部
94 ピッチ側ベース転走面
96 ピッチ側接続ピン
98 ピッチ側テーブル転走面
100 ロール側駆動モータ
102 ロール側直動案内機構
104 連結フレーム
106 ロール側接続ロッド
108 提供情報生成部
110 走行用モータ駆動制御部
112 基体傾斜角検出部
114 ロールピッチ機構駆動制御部
120 近接覚センサ
122 把持部カバー
124 基台
126 孔部
128 方向指示用突起部
130 手掌位置検出部
132 把持部位置変化機構駆動制御部
301 第1リング状センサRS1の一方の端子
302 第1リング状センサRS1の他方の端子
321 抵抗素子
331 電源端子
332 基準電圧(GND)端子
340 検知処理部
Ar 許容距離
fr 路車間距離検出部と溝の底面との距離
RS1 第1リング状センサ
RS2 第2リング状センサ
OSE1 第1光センサ素子
OSE2 第2光センサ素子
H 被案内者の手
V1 端子301から出力される電圧の電圧値
V2 端子302から出力される電圧の電圧値
【特許請求の範囲】
【請求項1】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御することを特徴とする車輪型ロボット。
【請求項2】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする車輪型ロボット。
【請求項3】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御し、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする車輪型ロボット。
【請求項4】
前記ロールピッチ機構は、前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って相対移動可能に連結することを特徴とする請求項1または請求項3に記載した車輪型ロボット。
【請求項5】
前記路車間距離検出部が前記路車間距離を検出する検出方向を、前記路車間距離検出部から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたことを特徴とする請求項2または請求項3に記載した車輪型ロボット。
【請求項6】
前記車輪型ロボットを支持する複数の車輪と、
前記複数の車輪が前記路面に接地している状態で、前記路面よりも上方に配置されている滑落抑制部と、を備え、
前記滑落抑制部は、前記複数の車輪のうち少なくとも一つを除く車輪が前記路面から脱輪した状態で、前記路面と接触することを特徴とする請求項1から請求項5のうちいずれか1項に記載した車輪型ロボット。
【請求項7】
前記移動部に対して前記把持部の位置を変化させる把持部位置変化機構と、
前記被案内者が前記把持部を把持していない状態で、前記把持部に対する前記被案内者の手の位置を検出する手掌位置検出部と、
前記把持部位置変化機構を駆動させる把持部位置変化機構駆動部と、
前記把持部位置変化機構駆動部の駆動状態を制御する把持部位置変化機構駆動制御部と、を備え、
前記把持部位置変化機構駆動制御部は、前記手掌位置検出部が位置を検出した前記被案内者の手の下方へ前記把持部が移動するように、前記把持部位置変化機構駆動部の駆動状態を制御することを特徴とする請求項1から請求項6のうちいずれか1項に記載した車輪型ロボット。
【請求項8】
前記手掌位置検出部は、
互いに並列に接続された複数の第1光センサ素子を有し、且つ複数の前記第1光センサ素子が円環状に配置される第1リング状センサと、
互いに並列に接続された複数の第2光センサ素子を有し、且つ複数の前記第2光センサ素子が円環状に配置される第2リング状センサと、
前記第1リング状センサと前記第2リング状センサとを、前記第1光センサ素子と前記第2光センサ素子とが互いに90度の角度をなし、且つ前記第1光センサ素子が前記第2光センサ素子よりも上に位置するように固定する基台と、
前記基台に固定された状態の前記第1リング状センサ及び前記第2リング状センサから出力された電圧を演算処理し、方位角及び仰角のうち少なくとも一方に基づいて前記被案内者の手の位置を検知する検知処理部と、を備える近接覚センサを有することを特徴とする請求項7に記載した車輪型ロボット。
【請求項1】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御することを特徴とする車輪型ロボット。
【請求項2】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする車輪型ロボット。
【請求項3】
被案内者が把持する把持部を取り付けた基体と、
前記被案内者による前記把持部への入力に応じて前記基体を移動させる移動部と、
水平面に対する前記基体の傾斜角度を検出する基体傾斜角検出部と、
前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構と、
前記ロールピッチ機構を駆動させるロールピッチ機構駆動部と、
前記ロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部と、
前記被案内者による前記把持部への入力に応じて前記基体が移動するように、前記移動部が備える駆動輪を駆動させる走行用モータと、
前記走行用モータの駆動状態を制御する走行用モータ駆動制御部と、
前記駆動輪が走行する走行路の路面と前記基体との距離である路車間距離を検出する路車間距離検出部と、を備え、
前記ロールピッチ機構駆動制御部は、前記基体傾斜角検出部が検出した傾斜角度が減少するように、前記ロールピッチ機構駆動部の駆動状態を制御し、
前記走行用モータ駆動制御部は、前記路車間距離検出部が検出した路車間距離が予め設定した許容距離を超えていると判定すると、前記駆動輪が停止するように前記走行用モータの駆動状態を制御することを特徴とする車輪型ロボット。
【請求項4】
前記ロールピッチ機構は、前記基体と前記移動部とを、平面視で直交する二つの軸回り方向へ曲線軌道に沿って相対移動可能に連結することを特徴とする請求項1または請求項3に記載した車輪型ロボット。
【請求項5】
前記路車間距離検出部が前記路車間距離を検出する検出方向を、前記路車間距離検出部から前方へ水平に延在する線から下方へ45[°]傾斜させた方向としたことを特徴とする請求項2または請求項3に記載した車輪型ロボット。
【請求項6】
前記車輪型ロボットを支持する複数の車輪と、
前記複数の車輪が前記路面に接地している状態で、前記路面よりも上方に配置されている滑落抑制部と、を備え、
前記滑落抑制部は、前記複数の車輪のうち少なくとも一つを除く車輪が前記路面から脱輪した状態で、前記路面と接触することを特徴とする請求項1から請求項5のうちいずれか1項に記載した車輪型ロボット。
【請求項7】
前記移動部に対して前記把持部の位置を変化させる把持部位置変化機構と、
前記被案内者が前記把持部を把持していない状態で、前記把持部に対する前記被案内者の手の位置を検出する手掌位置検出部と、
前記把持部位置変化機構を駆動させる把持部位置変化機構駆動部と、
前記把持部位置変化機構駆動部の駆動状態を制御する把持部位置変化機構駆動制御部と、を備え、
前記把持部位置変化機構駆動制御部は、前記手掌位置検出部が位置を検出した前記被案内者の手の下方へ前記把持部が移動するように、前記把持部位置変化機構駆動部の駆動状態を制御することを特徴とする請求項1から請求項6のうちいずれか1項に記載した車輪型ロボット。
【請求項8】
前記手掌位置検出部は、
互いに並列に接続された複数の第1光センサ素子を有し、且つ複数の前記第1光センサ素子が円環状に配置される第1リング状センサと、
互いに並列に接続された複数の第2光センサ素子を有し、且つ複数の前記第2光センサ素子が円環状に配置される第2リング状センサと、
前記第1リング状センサと前記第2リング状センサとを、前記第1光センサ素子と前記第2光センサ素子とが互いに90度の角度をなし、且つ前記第1光センサ素子が前記第2光センサ素子よりも上に位置するように固定する基台と、
前記基台に固定された状態の前記第1リング状センサ及び前記第2リング状センサから出力された電圧を演算処理し、方位角及び仰角のうち少なくとも一方に基づいて前記被案内者の手の位置を検知する検知処理部と、を備える近接覚センサを有することを特徴とする請求項7に記載した車輪型ロボット。
【図1】


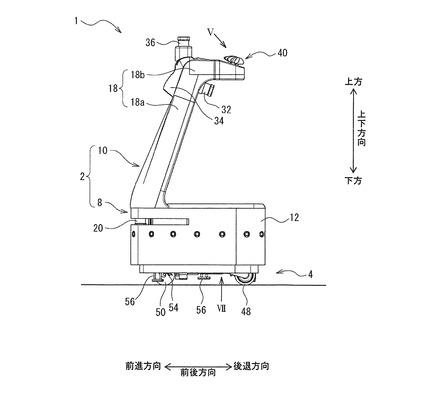
【図2】

【図3】

【図4】
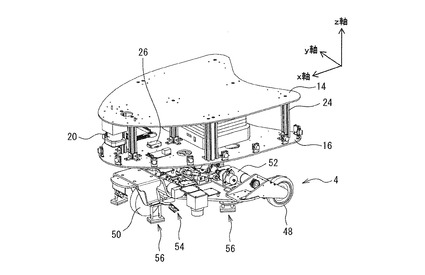
【図5】
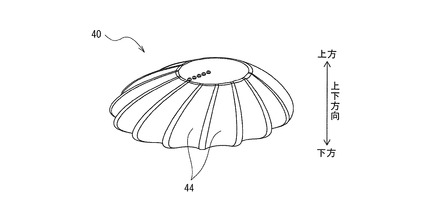
【図6】
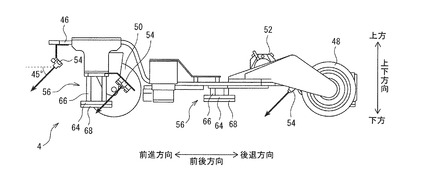
【図7】
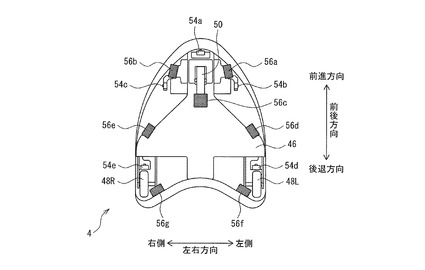
【図8】

【図9】
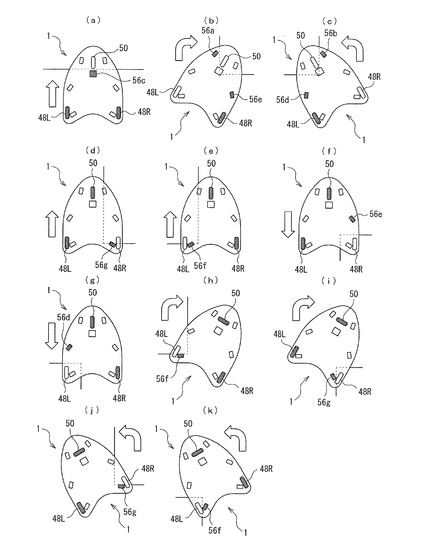
【図10】
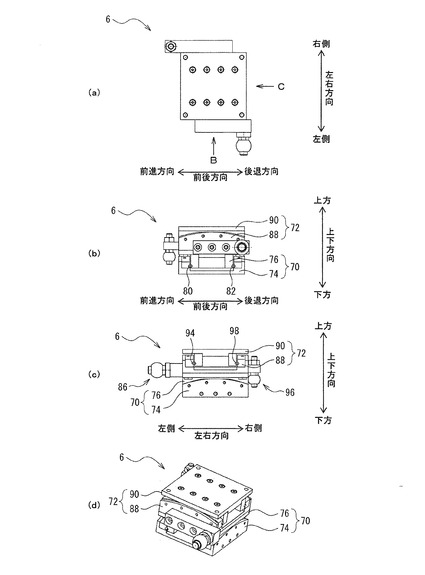
【図11】
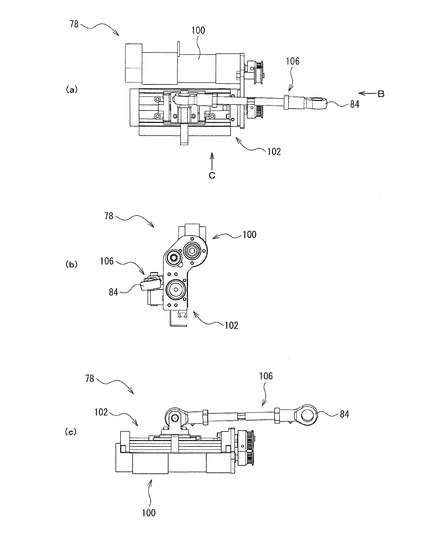
【図12】
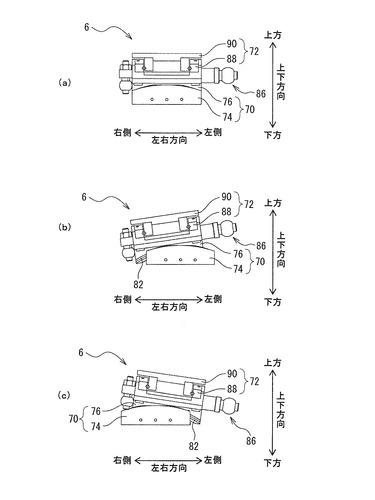
【図13】

【図14】
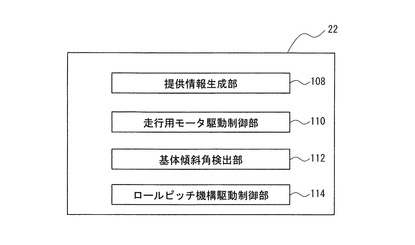
【図15】
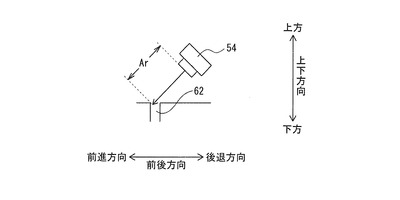
【図16】

【図17】
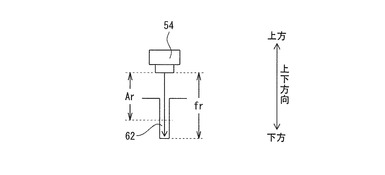
【図18】
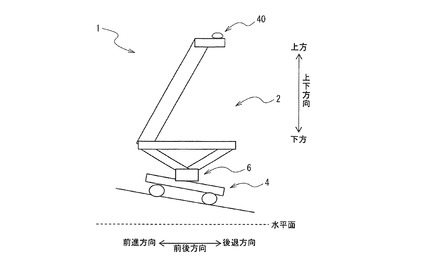
【図19】
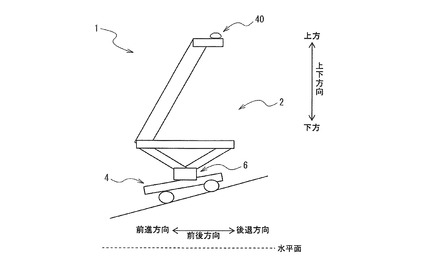
【図20】

【図21】
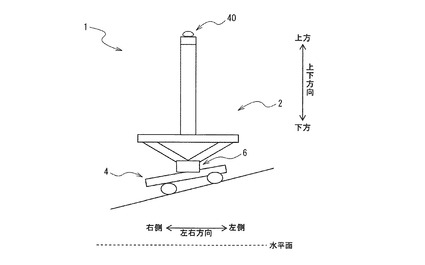
【図22】
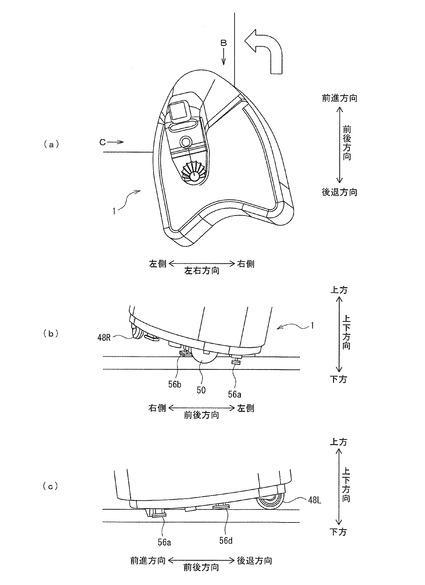
【図23】

【図24】
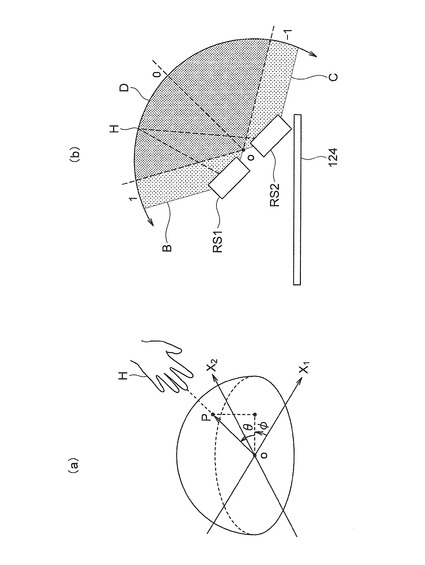
【図25】

【図26】

【図27】
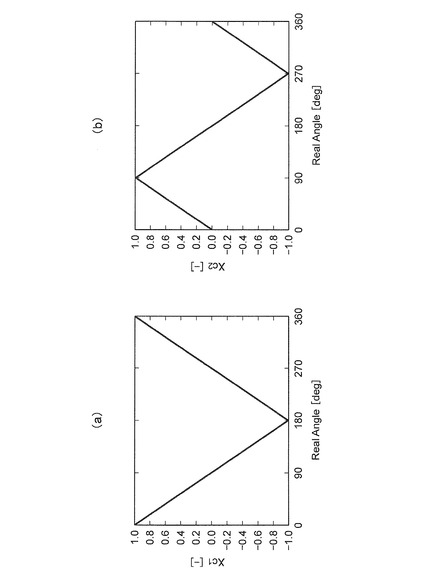
【図28】
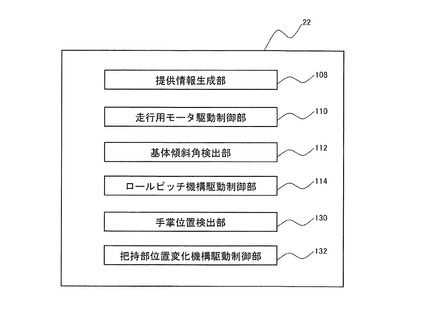
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2013−101593(P2013−101593A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−118482(P2012−118482)
【出願日】平成24年5月24日(2012.5.24)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成24年5月24日(2012.5.24)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]