
Fターム[5H301GG10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408) | 超音波検出手段であるもの (262)
Fターム[5H301GG10]に分類される特許
1 - 20 / 262
群集の知能ロボットを用いた地図構築方法及びその装置
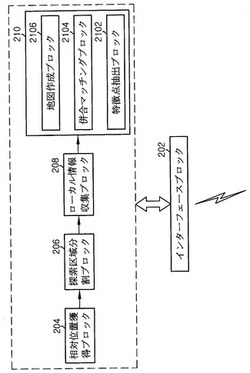
【課題】各ロボットからの情報を融合して環境地図全体を生成できる装置を提供する。
【解決手段】地図を作成しようとする探索範囲を自律走行する各ロボット間の相対位置を検出204、検出された相対位置に基づいて各ロボット別の探索区域を分割206、各ロボットから地図の生成のために用いられる探索区域に対するローカル情報をそれぞれ獲得208した後、これらの情報を融合して環境地図全体を生成210するようにすることで、インフォーマルな環境で地図の作成のための探索範囲を縮小して探索時間が過度にかかるのを効果的に抑制でき、選択的なマッチングを通じて各ロボットから獲得したローカル情報202の併合時間を低減できる。
(もっと読む)
車輪型ロボット

【課題】基体の傾斜や転倒を抑制することが可能な、車輪型ロボットを提供する。
【解決手段】被案内者が把持する把持部を取り付けた基体の水平面に対する傾斜角度を検出する基体傾斜角検出部112と、基体と把持部への入力に応じて基体を移動させる移動部とを、基体傾斜角検出部112が検出した傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構を駆動させるロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部114と、把持部への入力に応じて基体を移動させる駆動輪が走行する走行路の路面と基体との距離である路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪を駆動させる走行用モータの駆動状態を駆動輪が停止するように制御する走行用モータ駆動制御部110を備える。
(もっと読む)
改札案内ロボット
【課題】自動改札機でICカードをうまく使えない利用者に対して再タッチ行為を行えるように迅速に、丁寧に、分かりやすく応対できる改札案内ロボットを提供する。
【解決手段】改札案内ロボット10は、自律移動型の装置構成(12,43,44)と案内情報提供部(22)とロボット制御装置41を備え、必要が生じたときに自動改札機31に接近してその改札機能を補助・支援する。自動改札機の無線通信装置37と間で相互に情報の送受を行う無線通信装置42と、ICカードリーダ・ライタと、ICカード処理装置45とを備える。自動改札機でICカード処理未了が生じたとき、自動改札機からの出動指令に基づいて自動改札機に接近し、通行不能状態にある利用者に対し案内情報提供部を介して自身のICカードリーダ・ライタへのICカードタッチ行為を促す。
(もっと読む)
ロボット清掃機及びその制御方法
【課題】走行経路上で障害物が感知されても、それがロボット掃除機システムを構成する付加装置領域である場合は、補助掃除ユニットが突出しないように制御するロボット掃除機及びその制御方法を提供すること。
【解決手段】ロボット掃除機は、床を走行する本体、前記本体に近接する障害物を感知する障害物感知部、前記本体の下部に突出及び収納可能に装着された補助掃除ユニット、及び、前記障害物が感知されると、前記補助掃除ユニットが突出または収納されるように制御し、充電器領域を認知し、前記充電器領域では前記補助掃除ユニットが突出しないように制御する制御部を備える。
(もっと読む)
水中移動型検査装置及び水中検査設備
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
電動式ランナ
【課題】任意の機器が接続され、敷設されたダクト状のレールに沿って容易に位置を変更することができる電動式ランナを提供する。
【解決手段】電動式ランナ1は、レール2に走行自在に係合されると共に任意の機器9が接続されるランナ11と、ランナ11に設けられランナ11を自走させるアクチュエータ12とを備えている。ランナ11は、ダクト2に係合する係合部14と、機器9を接続するためのコネクタ15とを備えている。ランナ11は、電動式ランナ1にプラグ機能(挿入着脱機能)を付与する。アクチュエータ12として、衝撃力によってランナ11を自走させるインパクトアクチュエータを用いることができる。電動式ランナ1は、アクチュエータと共に自走するので、従来の配線ダクト用のプラグと異なり、移動のための着脱が不要であり、容易に位置を変更することができる。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
電気掃除機
【課題】床面上の障害物へのサイドブラシの引っ掛かりにより走行不能となることを防止できる電気掃除機を提供する。
【解決手段】電気掃除機11は、床面Fに接地するブラシ毛32bを備えるサイドブラシ18を、本体ケース12の下部の吸込口の前方に旋回可能に有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあるかどうかを検出する障害物検出手段21を有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあることを障害物検出手段21により検出したときにサイドブラシ18を上方へと退避させる制御手段を有する。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
【課題】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法を提供する。
【解決手段】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
(もっと読む)
衝突防止機能付き車両
【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
自律移動装置及び自律移動制御方法
【課題】 目標物の捕捉が中断された場合であっても、確実に特定の目標物の追従を再開することができるようにする。
【解決手段】 移動する目標物に追従して自律的に移動する自律移動装置において、第1の認証情報を入力する第1の入力手段と、第1の認証情報を記録する認証情報記録手段と、目標物を捕捉する捕捉手段と、捕捉された目標物に追従するように走行させ、捕捉手段による目標物の捕捉が不能となった場合に停止させる走行制御手段と、目標物の捕捉が不能となった場合に、第2の認証情報を入力する第2の入力手段と、第2の認証情報と認証情報記録手段により記録された第1の認証情報とが一致するかを照合する照合手段とを具備し、走行制御手段は、照合手段により第2の認証情報と第1の認証情報とが一致すると照合された場合に、再度、捕捉手段により捕捉された目標物に追従するように走行させる。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム
【課題】移動体の移動経路を最適に設定すること。
【解決手段】移動体マップ装置10は、複数の小領域2aに分割された地図情報2を記憶する第1記憶手段と、移動体1の現在位置を検出する位置検出手段と、位置検出手段により検出された移動体1の現在位置に応じて、第1記憶手段の地図情報2の中から所定領域5を読み出す読出手段と、読出手段により第1記憶手段の地図情報2から読み出された所定領域5を一時的に記憶する第2記憶手段と、地図情報2における移動体1の初期位置から目標位置まで移動経路を、隣接する各小領域2aのサブゴール2bを夫々接続して設定する経路設定手段と、を備える。経路設定手段は、第2記憶手段の所定領域5内において、現在位置近傍のサブゴール2bと目標位置に近い側のサブゴール2bと、の距離を短縮するように、各小領域2aのサブゴール2bを夫々再接続し経路を変更する。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム
【課題】地図情報のメモリ容量を効率的に低減させつつ、地図情報の更新を適切に行うことができる移動体マップ装置、その処理方法及びプログラムを提供すること。
【解決手段】移動体マップ装置は、地図情報を記憶する第1記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の移動状態を検出する状態検出手段と、第1記憶手段の地図情報の中から、移動体の現在位置を含む所定領域を読出す読出手段と、第1記憶手段の地図情報から読み出された所定領域を、一時的に記憶する第2記憶手段と、位置検出手段により検出された移動体の現在位置と、状態検出手段により検出された移動体の移動状態と、に基づいて、移動体が所定領域内から外れるときの移動体の移動位置を予測する移動予測手段と、を備える。読出手段は、第1記憶手段の地図情報の中から、移動予測手段により予測された移動位置を含む所定領域を予め読出し、第2記憶手段に記憶させる。
(もっと読む)
自走式装置の位置の決定方法
【課題】電動駆動走行車(3)を有する自走式装置(1)の位置の決定方法を提供する。
【解決手段】装置(1)が障害物検出装置(A)を備え、さらに占有された予め計算された装置(1)の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置(1)に対応した走行後の次に占有される第2の位置に関して、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル(6)の1つが装置(1)の新たな位置として占有される自走式装置(1)の位置の決定方法である。
(もっと読む)
走行制御システム
【課題】移動体の制御を安価にすることができ目標位置まで自動で移動することを目的とする。
【解決手段】移動体100に備えられ信号光を投光及び検知可能な投光機20と、投光機20が投光する信号光と同じ方向へ超音波を送信すると共に送信した超音波を検知する2つの超音波センサ30と、移動体100の目標位置200に備えられ投光機20の投光する信号光を反射する反射板50から構成する走行制御システム10であって、移動体100は、投光機20で移動体100の進行方向を検知した後、2つの超音波センサ30で移動体100の目標位置200に対する移動体100の傾きを補正しながら目標位置200まで移動することを特徴とする走行制御システム10。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
ロボットシステム及び地図更新方法
【課題】 地図更新を行うことで、過去の環境地図と更新後の環境地図に誤差が加わる。そのため、更新処理を繰り返すと誤差が蓄積する。
【解決手段】 予め設定された環境地図における所定領域の形状情報と、環境地図上の所定領域の属性とを対にして複数記憶し、環境地図と記憶部に記憶した所定領域を比較して所定領域に対応する属性を読み出し、計測箇所における属性に応じて、環境地図を更新する。
(もっと読む)
1 - 20 / 262
[ Back to top ]