
駐車監視方法、駐車監視プログラム、および駐車監視装置
【課題】 GPSセンサを利用した駐車監視システムにおいて、検知器単体で判定するのではなく、複数の検知器の判定を加味し、複合的な情報処理システムとして構築する。
【解決手段】
本発明は、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置であって、アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較し、衛星の高度が車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、一方、衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定することを特徴とする駐車監視装置に関する。
【解決手段】
本発明は、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置であって、アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較し、衛星の高度が車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、一方、衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定することを特徴とする駐車監視装置に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車スペースにおける車両の有無をGPS(Global Positioning System )センサを利用して検知する駐車監視システムの技術に関する。
【背景技術】
【0002】
従来、駐車車両の監視を行なうために、カメラを用いた画像処理によるセンサや、超音波や赤外線を用いた投射・反射型の検知センサを用いて、駐車車両の有無を検知する設備が稼働している(図10、11参照)。
【0003】
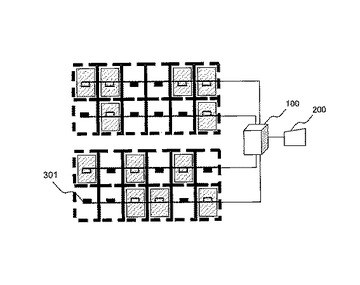
図10は、カメラによる駐車監視の構成例を示している。サーバ100が、カメラ300によって撮像された駐車区画の画像データを取得し、画像処理した結果を管理者が使用する端末装置200に表示させるものとなっている。また、図11では、カメラの代わりに光センサなどの検知センサ301によって駐車車両が検知される。しかし、検知箇所に障害物があると車両と誤認識するため(例えば、図10のA区画部分)、特に屋外で使用する場合には、検知精度を保持するために維持作業(清掃や枝の伐採等)を行なう必要がある。
【0004】
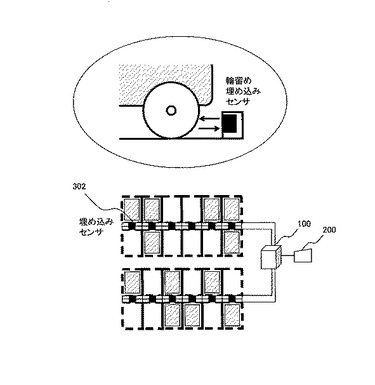
また、駐車場の支柱や車両の輪留めにセンサを埋め込む方法も提案されている(図12参照)が、フラットな状態で駐車監視を行ないたい場合(例えば、道路など多目的スペースを駐車場として利用する場合)には不向きであり、かつセンサの設置に大規模な工事を伴う。
【0005】
上述した問題に対し、車両検知の手段としてGPS衛星の発信する電波を利用した検知器が提案されている(例えば、特許文献1参照)。これは、仰角の高いGPS衛星より発信される電波の強弱から駐車スペース毎に駐車の有無を測定するものである。つまり、電波の受信が強いときに「駐車車両無し」、電波の受信が弱いときに「駐車車両有り」と判定している。
【特許文献1】特開2001−188990号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特開2001−188990号公報による駐車監視の方法では、GPS衛星からの電波の強弱のみであるため、駐車車両の有無を判定するには、以下のような問題を生ずる(図13参照)。
(1)障害物がある場合と無い場合において電波の強弱を採取する必要がある。そのため、検知精度を向上するには、駐車スペース毎の車両の有無の各ケースに対し、GPS衛星からの電波測定を行なう必要がある。
(2)判定基準が強弱であることから環境に影響されやすく、駐車スペース毎に車両有無を判定する閾値を設定する必要がある。
(3)GPS衛星の高度が高いという条件だけであるため、GPS衛星の高度と隣接の駐車車両の車高との関係から電波が遮られるケースがある。そのため、自センサ上に駐車車両があるために電波の受信ができない(弱い)のか、隣接する駐車車両に影響されているのか判断がつかない。
【0007】
そこで、上述した問題を解決するため、本発明では、GPSを利用した検知器単体で判定するのではなく、複数の検知器の判定を加味した複合的な情報処理システムを提供する。
【課題を解決するための手段】
【0008】
第一の発明は、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、を有することを特徴とする駐車監視方法に関する。
【0009】
すなわち、第一の発明によれば、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、比較手段が、アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較し、判定手段が、衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定する構成とすることによって、アンテナ(GPSセンサともいう)自体で位置検出できるため、GPSセンサを移動しても設定が容易となり、設定間違いを防ぐことができる。また、フラットな状態で設置できるため、駐車場だけでなく、道路のパーキングエリアにも適用できる。
【0010】
第二の発明は、前記アンテナによるGPS電波の受信が不安定となる場合に、前記駐車車両の有無を判定する判定保持時間を設定し、受信不安定の時間が該判定保持時間内であるとき、直前の受信によって判定することを特徴とする上記第一の発明に記載の駐車監視方法に関する。
【0011】
すなわち、第二の発明によれば、例えば、駐車場の料金メータの管理単位に合わせてサンプリング時間を設定するなど、駐車車両の有無を判定する判定保持時間を設定することによって、通信障害があっても、通信不安定の時間が当該判定保持時間内であるときには直前で受信した判定結果が反映される。
【0012】
第三の発明は、前記自アンテナに隣接する他アンテナの重み付けが登録された隣接アンテナの重み付けテーブルに基づいて、隣接駐車エリアの駐車車両有無の結果を加味して判定することを特徴とする上記第一の発明に記載の駐車監視方法に関する。
【0013】
すなわち、第三の発明によれば、例えば、自アンテナに隣接するアンテナ上にある駐車車両においても、縦横に隣接する場合と斜めや開口部、あるいは通路に接している場合などによって影響度が異なるため、自アンテナに隣接する他アンテナに対し重み付けを設定しておくことによって、処理対象のサンプル数を減少させ、判定処理の時間の短縮を図ることができる。
【発明の効果】
【0014】
以上、本発明により以下の効果を生ずる。
(1)アンテナ(GPSセンサ)自体で位置検出できるため、GPSセンサを移動しても設定が容易となり、設定間違いを防ぐことができる。
(2)フラット状態で設置できるため、駐車場だけでなく、道路のパーキングエリアにも適用できる。
(3)道路への設置、GPSセンサによる位置検出、情報処理システムによる情報の一括監視できることから放置駐車車両の取締りにも利用が可能である。
(4)本発明の適用箇所並びに監視対象は、それぞれ、“駐車場”の代わりに資材置き場やゴミ集積場、“駐車車両”の代わりに資材やゴミに置き換えることが可能となる。
【発明を実施するための最良の形態】
【0015】
以下、図面にもとづいて本発明の実施形態を説明する。
【0016】
図1は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムの基本構成を示す。
【0017】
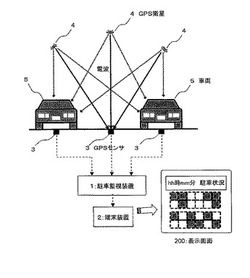
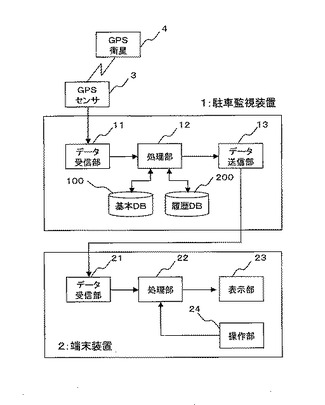
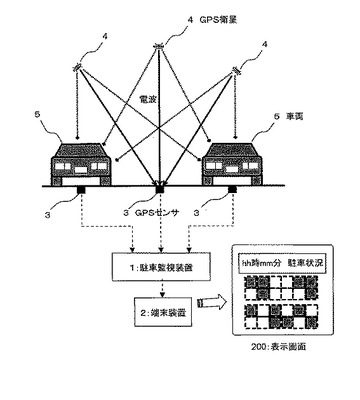
本駐車監視システムは、GPS衛星4からの電波を受信する、各駐車エリアの駐車車両の直下に埋め込まれたアンテナ(以降、GPSセンサ3と表現する)によって取得したGPS情報(ID、位置)に基づいて、各駐車エリアにおける駐車車両の有無を判定する駐車監視装置1と、LAN(Local Area Network) 接続して駐車監視装置1からデータを受信する管理者用の端末装置2とから構成される。
【0018】
さらに、駐車監視装置1は、GPSセンサ3を介して衛星からのGPS情報を受信するデータ受信部11、受信したGPS情報をGPS基本情報テーブルとして基本データベース100に登録し、ある時刻における駐車の有無を当該GPS基本情報テーブルを参照して判定する処理部12、および駐車状況に関するデータを管理者の端末装置2に送信するデータ送信部13から構成されている。
【0019】
ここで、GPS受信基本テーブルは、GPSセンサ3毎に作成され、基本データベース100に格納し、駐車有無の判定処理毎に参照を行なう。また、履歴データベース200に格納される履歴テーブルは、日毎に作成して格納され、後述する補完判定処理の毎に参照を行なう。
【0020】
また、端末装置2は、駐車監視装置1から送信される駐車状況のデータを受信するデータ受信部21、ディスプレイに表示するための加工を行う処理部22、駐車状況のデータを表示する表示部23、および入力操作を行う操作部24から構成されている。
【0021】
そして、端末装置2において、(1)駐車状態判定結果に基づいた駐車有無、(2)隣接車両の影響により、“不明”と判定されたGPSセンサ3の状況、(3)補完判定の結果、“異常”と判定されたGPSセンサ3の状況等を表示して、管理者への情報提供がなされる。
【0022】
なお、駐車監視装置1、および端末装置2は、図示していないCPU(Central Processing Unit )、メモリを備えたコンピュータである。
【0023】
図2は、本発明の実施の形態になる駐車監視システムにおけるGPSセンサによる衛星電波受信の構成例を示す。
【0024】
屋外の駐車スペースに衛星からのGPS情報(ID、位置)を受信するアンテナを埋設し、このアンテナ(以降、GPSセンサ3と表現)による受信状態に基づいて障害物の有無検知を行なうものである。
【0025】
GPSセンサ3は、駐車スペース毎に1個以上設置する。その際、GPSセンサ3は、“点”としてGPS情報を受信することとなるが、判定する対象が“面”であることから、仮想的に勢力範囲(図3に後述)を設定し、GPSセンサ3の判定結果は、この勢力範囲に対して一様の結果として扱うものとする。
【0026】
GPS衛星4は複数存在し、障害物の無い地点では、3個以上のGPS衛星4の電波を受信することで、地球上での位置検出が可能となる。また、常に同じ軌道を通り、同じ衛星のGPS情報を出力するため、同時刻であれば、受信対象となる衛星及びその衛星の位置は同一となる。これを利用することによって、本発明では、電波の強弱という従来のアナログ的な判定方式ではなく、GPS情報の受信可否によるデジタル的な判定を可能とするものである。
【0027】
障害物が無い場合には、同時刻にGPS衛星から同一の情報を受信することができる。そこで、障害物(=駐車車両)の無い状態で、1日のGPS衛星4の状態を受信し、テーブル化しておく(図4に示すGPS受信基本テーブル)。
【0028】
そして、同時刻におけるGPS受信基本テーブルを参照し、GPSセンサ3の受信状況と比較することによって、障害物の有無の判定は、a.GPS受信基本テーブルと同じであれば、「駐車車両無し」と判定し、b.GPS受信基本テーブルより受信可能なGPS衛星が減少していれば、「駐車車両有り」と判定する。上記のような判定を行うことにより、駐車スペース毎、および駐車車両の有無毎に、電波の測定及び閾値の設定は不要となる。
【0029】
また、GPS情報を取得することで、GPSセンサ3本来の位置検出が行なうことが可能となる。例えば、駐車場のレイアウトが変更された場合など、本来、GPSセンサ3毎に、“実際の駐車スペースの勢力範囲−GPSセンサ3の位置−GPSセンサ3のID”のデータを人為的に関連付ける必要があるが、GPSセンサ3の位置が自動的に検出されるため、登録作業が不要となり、作業の軽減と設定ミスを回避することができる。
【0030】
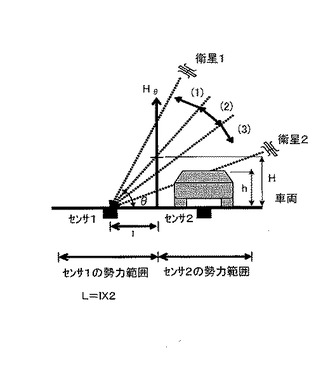
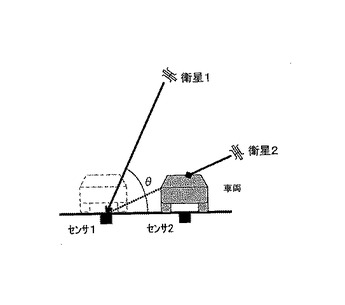
図3は、隣接する駐車車両の車高とGPS衛星の高度の関係を示す。GPS衛星4の位置およびGPSセンサ3の位置関係については、上述したように自動的に得られる情報であるため、これらを用いることによって自GPSセンサから見た以下の関係を算出することができる。
【0031】
GPS受信基本テーブルには、GPSセンサ3から見たGPS衛星4の高度に関係なく受信可能な衛星が登録される。そのため、GPS衛星4の高度が低い場合には、隣接する駐車車両の影となり、自GPSセンサ上には駐車車両5が存在しないのに、GPS衛星4の情報が受信できず、“駐車車両有り”と判断されてしまう。
【0032】
そこで、こうした状況を回避するため、本発明では、以下の定義及び判定を行なう。
【0033】
GPS衛星4の高度の高低を判断するため、駐車車両5の高さに基準H(閾値)を設ける。検知対象が車両であることから、通常は法令上の車高とする。なお、この基準は独自に設定しても良い。
【0034】
GPS衛星の仰角をθ、GPSセンサ3の勢力範囲の境界までの距離をIとすると、勢力範囲(L=IX2)境界におけるGPS衛星の高度Hθについて、以下の場合分けができる。
a.Hθ≧hの場合:GPS衛星が図の(1)のエリアにある場合で、隣接する車両の影響を受けないため、隣接するGPSセンサ3の結果によらず、自GPSセンサの判定結果を採用する。
b.H≧Hθ≧hの場合:GPS衛星が図の(2)のエリアにある場合で、隣接するGPSセンサ3が“駐車車両無し”と判定した場合には、自GPSセンサ3の判定結果を採用する。
c.h≧Hθの場合:GPS衛星は図の(3)のエリアにある場合で、隣接するGPSセンサ3が“駐車車両有り”と判断し、GPSセンサ3単独による判定は不可能であるため、“不明”として管理者へ状況通知を行なう。
【0035】
上述したように、a.b.による判定を通常処理として、駐車車両の有無を監視することができる。しかしながら、衛星からの情報を基にしていることから、判定が不安定になることが予想される。
【0036】
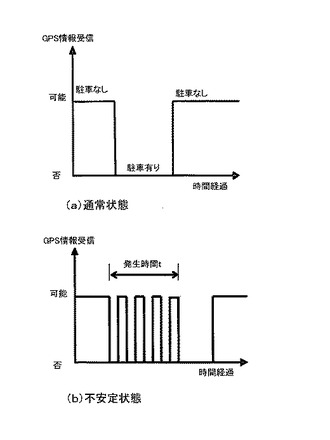
図3は、本発明の実施の形態になるGPS情報の受信状態を表す図である。時間経過に対するGPS情報受信の状態を模式的に示したものであり、(a)は、通常処理として、駐車車両の有無を明確に監視することができる場合、(b)は、受信状態が不安定で、駐車車両の有無が判定できない場合を示している。
【0037】
(b)の場合に、不安定な状態の時間tを計測し、さらに判定保持時間T(任意)を設け、このtとTの関係から以下の補完処理を行なう。
t≦Tの場合:判定保持時間内で判定結果が安定していることから、直前の判定結果を採用する。
t>Tの場合:不安定な状態が判定保持時間以上に経過していることから、直前の判定結果を採用することは相応しくない。このような状況に対しては、日毎に採取した履歴と比較して判定を行なう。
【0038】
しかし、単純に比較する場合には、前述した通り、GPS衛星が毎日同じ起動を取ることから、サンプリング単位に全ての駐車パターンを採取し、それとのマッチングを行なうこととなる。これでは、全ての比較対象となる履歴データの採取は困難であり、マッチング対象も膨大な量になる。これを回避するため、以下の方法により行なう。
(1)日単位で、一定時間毎に各GPSセンサ3による駐車状態を採取する。
(2)判定に影響を及ぼす他の駐車エリア(GPSセンサ)が予想する。これは、GPSセンサ3毎に影響するGPSセンサ3を重み付けテーブルに登録しておくことで実現される。上記重み付けテーブルは、以下の観点から作成する。
【0039】
判定に影響が予想される範囲は、自GPSセンサ3に隣接するGPSセンサ3上にある駐車車両が対象となるが、隣接する駐車車両においても、縦横に隣接する場合と斜めや開口部、通路に接している場合があって影響度が異なる。
【0040】
そこで、GPSセンサ3毎に受信可能なGPS衛星4の軌道は、後述する図5のGPS受信基本テーブルに基づいて、判定に使用するGPS衛星を特定し、時刻毎に影響される方向を定める。
(3)受信不安定な状態が判定保持時間以上に経過した場合、(2)に基づいて(1)の同時刻の駐車状態をチェックし、自GPSセンサ(不安定な状態)以外が同じ判定結果にマッチングしたときの判定結果を採用する。
【0041】
なお、マッチングを行なう時には、(2)に記したとおり、判定に使用するGPS情報は特定できているため、該当分とのマッチングを行なうだけで良い。
(4)(3)に該当しない場合には、“異常”として管理者へ状況通知を行なう。
【0042】
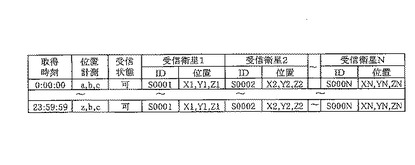
図5は、本発明の実施の形態になるGPS受信基本テーブルのデータ構成を示す。GPS受信基本テーブルは、受信の「取得時刻」、「位置計測」、「受信状態」、および「受信衛星1〜N(ID、位置)」の項目からなる複数のレコードで構成されている。例えば、第一のレコードでは、00:00:00の時刻において、位置計測(a,b,c)のGPSセンサ3が受信可能の状態にあり、それぞれのIDと位置を有するN個の受信衛星が登録されている。
【0043】
GPS衛星4からのGPS情報(ID、位置情報)は、障害物が無い場合には、同時刻に同一の情報として受信することができ、駐車車両の無い状態で、1日GPS衛星の状態を受信し上記GPS受信基本テーブルを作成する。そして、同時刻において、GPS受信基本テーブルとGPSセンサ3の受信状況を比較し、駐車車両の有無の判定を行なう。
【0044】
つまり、GPS受信基本テーブルと同じであれば、「駐車車両無し」とし、GPS受信基本テーブルより受信可能なGPS衛星が減少していれば、「駐車車両有り」と判定される。
【0045】
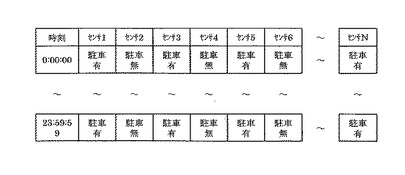
図6は、本発明の実施の形態になるGPSセンサによる駐車有無の判定に関する履歴テーブルのデータ構成を示す。履歴テーブルは、日単位で、一定時間毎に各GPSセンサ3における駐車状態を採取したものであり、「取得時刻」および「センサ1〜N」の駐車車両の有無の項目からなる複数のレコードで構成されている。なお、図6では、GPSセンサは単にセンサと表現している。
【0046】
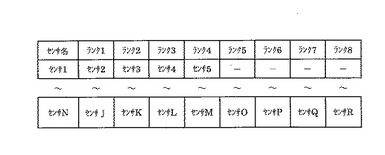
図7は、本発明の実施の形態になるGPSセンサの重み付けテーブルのデータ構成を示す。GPSセンサ3による駐車有無の判定に影響が予想される範囲は、自GPSセンサ3に隣接するGPSセンサ3上にある駐車車両である。また、隣接する駐車車両においても、縦横に隣接する場合と斜めや開口部、通路に接している場合で、影響度が異なる。そこで、実施例では、GPSセンサ3毎に影響するGPSセンサ3を重み付けできるテーブルに登録するものである。重み付けテーブルは、各GPSセンサ3毎に影響する他センサの「センサ名」をランク付けしたものである。なお、図7でも同様に、GPSセンサは単にセンサと表現している。
【0047】
図8は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フローを示す。
【0048】
まず、ステップS11において、GPS衛星4から発信されているGPS情報(ID、位置情報)を取得する。ステップS12において、衛星からの受信状態が安定しているか否かを判定する。安定状態にあれば、ステップS13において、GPS受信基本テーブルを参照し、照合することによって受信可能衛星の数が減少しているかを判定する。
【0049】
照合の結果、受信衛星数に減少がなければ、ステップS14で、当該駐車エリアの駐車車両はなしと判定する。受信衛星数が減少していれば、ステップS15において、Hθ≧Hの条件を判定する。すなわち、衛星高度Hθが車高の閾値H以上であれば、ステップS17で、駐車車両有りと判定する。衛星高度Hθが車高の閾値H未満であれば、ステップS16において、隣接駐車エリアに駐車車両があるかを判定する。隣接駐車エリアに駐車車両がなければ、ステップS17で、駐車車両有りと判定する。
【0050】
また、隣接駐車エリアに駐車車両があるときには、ステップS18で、「不明」として処理し、ステップS19で、管理者への通知を行う。
【0051】
一方、ステップS12において、GPSセンサ3の衛星電波の受信状態が不安定であれば、図9の判定補間処理を行う。
【0052】
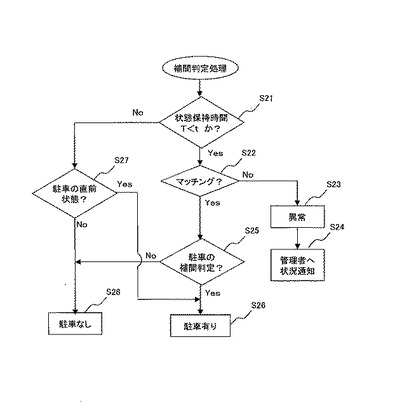
図9は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フロー(続き)を示す。本実施例は、図8の判定フローの続きとして、判定補間処理を行うものである。
【0053】
ステップS21において、予め設定した状態保持時間Tと通信不安定にある時間tとの比較を行い、t>Tであれば、ステップS22において、履歴テーブルを参照し、同時刻の履歴とのマッチング判定を行なう。同時刻の隣接駐車エリアの駐車状態をチェックし、自GPSセンサ(不安定な状態)以外が、同じ判定結果にマッチングしたときの判定結果を採用する。なお、マッチングを行なう時には、判定に使用するGPS情報は特定できているため、該当分とのマッチングを行なうだけで良い。
【0054】
一方、マッチングしていなければ、ステップS23において、「異常」と判定し、ステップS24で、管理者へ当該状態を通知する。また、マッチングしていれば、ステップS25において、駐車車両の補間判定を行う。
【0055】
補間判定において、隣接駐車エリアに駐車車両があれば、ステップS26で、駐車車両有りと判定する。また、隣接駐車エリアに駐車車両がなければ、ステップS28で、駐車なしと判定する。
【0056】
一方、ステップS21において、t≦Tであれば、ステップS27において、駐車の直前の状態を判定する。駐車の直前の状態が該当すれば、ステップS26で、駐車車両有りと判定し、駐車の直前の状態に該当しなければ、ステップS28で、駐車車両なしと判定する。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態になるGPSセンサを利用した駐車監視システムの基本構成を示す図である。
【図2】本発明の実施の形態になる駐車監視システムにおけるGPSセンサによる衛星電波受信の構成例を示す図である。
【図3】隣接する駐車車両の車高とGPS衛星の高度の関係を示す図である。
【図4】本発明の実施の形態になるGPS情報の受信状態を表す図である。
【図5】本発明の実施の形態になるGPS受信基本テーブルのデータ構成を示す図である。
【図6】本発明の実施の形態になるGPSセンサによる駐車有無の判定に関する履歴テーブルのデータ構成を示す図である。
【図7】本発明の実施の形態になるGPSセンサの重み付けテーブルのデータ構成を示す図である。
【図8】本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フローを示す図である。
【図9】本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フロー(続き)を示す図である。
【図10】従来例−その1(カメラによる駐車監視)を示す図である。
【図11】従来例−その2(検知センサによる駐車監視)を示す図である。
【図12】従来例−その3(輪留め埋め込みセンサによる駐車監視)を示す図である。
【図13】GPSセンサを用いた駐車監視の問題点(隣接する車両による影響)を示す図である。
【符号の説明】
【0058】
1 駐車監視装置
2 端末装置
3 GPSセンサ
4 GPS衛星
5 車両
11 データ受信部
12 処理部
13 データ送信部
21 データ受信部
22 処理部
23 表示部
24 操作部
【技術分野】
【0001】
本発明は、駐車スペースにおける車両の有無をGPS(Global Positioning System )センサを利用して検知する駐車監視システムの技術に関する。
【背景技術】
【0002】
従来、駐車車両の監視を行なうために、カメラを用いた画像処理によるセンサや、超音波や赤外線を用いた投射・反射型の検知センサを用いて、駐車車両の有無を検知する設備が稼働している(図10、11参照)。
【0003】
図10は、カメラによる駐車監視の構成例を示している。サーバ100が、カメラ300によって撮像された駐車区画の画像データを取得し、画像処理した結果を管理者が使用する端末装置200に表示させるものとなっている。また、図11では、カメラの代わりに光センサなどの検知センサ301によって駐車車両が検知される。しかし、検知箇所に障害物があると車両と誤認識するため(例えば、図10のA区画部分)、特に屋外で使用する場合には、検知精度を保持するために維持作業(清掃や枝の伐採等)を行なう必要がある。
【0004】
また、駐車場の支柱や車両の輪留めにセンサを埋め込む方法も提案されている(図12参照)が、フラットな状態で駐車監視を行ないたい場合(例えば、道路など多目的スペースを駐車場として利用する場合)には不向きであり、かつセンサの設置に大規模な工事を伴う。
【0005】
上述した問題に対し、車両検知の手段としてGPS衛星の発信する電波を利用した検知器が提案されている(例えば、特許文献1参照)。これは、仰角の高いGPS衛星より発信される電波の強弱から駐車スペース毎に駐車の有無を測定するものである。つまり、電波の受信が強いときに「駐車車両無し」、電波の受信が弱いときに「駐車車両有り」と判定している。
【特許文献1】特開2001−188990号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特開2001−188990号公報による駐車監視の方法では、GPS衛星からの電波の強弱のみであるため、駐車車両の有無を判定するには、以下のような問題を生ずる(図13参照)。
(1)障害物がある場合と無い場合において電波の強弱を採取する必要がある。そのため、検知精度を向上するには、駐車スペース毎の車両の有無の各ケースに対し、GPS衛星からの電波測定を行なう必要がある。
(2)判定基準が強弱であることから環境に影響されやすく、駐車スペース毎に車両有無を判定する閾値を設定する必要がある。
(3)GPS衛星の高度が高いという条件だけであるため、GPS衛星の高度と隣接の駐車車両の車高との関係から電波が遮られるケースがある。そのため、自センサ上に駐車車両があるために電波の受信ができない(弱い)のか、隣接する駐車車両に影響されているのか判断がつかない。
【0007】
そこで、上述した問題を解決するため、本発明では、GPSを利用した検知器単体で判定するのではなく、複数の検知器の判定を加味した複合的な情報処理システムを提供する。
【課題を解決するための手段】
【0008】
第一の発明は、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、を有することを特徴とする駐車監視方法に関する。
【0009】
すなわち、第一の発明によれば、各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、比較手段が、アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較し、判定手段が、衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定する構成とすることによって、アンテナ(GPSセンサともいう)自体で位置検出できるため、GPSセンサを移動しても設定が容易となり、設定間違いを防ぐことができる。また、フラットな状態で設置できるため、駐車場だけでなく、道路のパーキングエリアにも適用できる。
【0010】
第二の発明は、前記アンテナによるGPS電波の受信が不安定となる場合に、前記駐車車両の有無を判定する判定保持時間を設定し、受信不安定の時間が該判定保持時間内であるとき、直前の受信によって判定することを特徴とする上記第一の発明に記載の駐車監視方法に関する。
【0011】
すなわち、第二の発明によれば、例えば、駐車場の料金メータの管理単位に合わせてサンプリング時間を設定するなど、駐車車両の有無を判定する判定保持時間を設定することによって、通信障害があっても、通信不安定の時間が当該判定保持時間内であるときには直前で受信した判定結果が反映される。
【0012】
第三の発明は、前記自アンテナに隣接する他アンテナの重み付けが登録された隣接アンテナの重み付けテーブルに基づいて、隣接駐車エリアの駐車車両有無の結果を加味して判定することを特徴とする上記第一の発明に記載の駐車監視方法に関する。
【0013】
すなわち、第三の発明によれば、例えば、自アンテナに隣接するアンテナ上にある駐車車両においても、縦横に隣接する場合と斜めや開口部、あるいは通路に接している場合などによって影響度が異なるため、自アンテナに隣接する他アンテナに対し重み付けを設定しておくことによって、処理対象のサンプル数を減少させ、判定処理の時間の短縮を図ることができる。
【発明の効果】
【0014】
以上、本発明により以下の効果を生ずる。
(1)アンテナ(GPSセンサ)自体で位置検出できるため、GPSセンサを移動しても設定が容易となり、設定間違いを防ぐことができる。
(2)フラット状態で設置できるため、駐車場だけでなく、道路のパーキングエリアにも適用できる。
(3)道路への設置、GPSセンサによる位置検出、情報処理システムによる情報の一括監視できることから放置駐車車両の取締りにも利用が可能である。
(4)本発明の適用箇所並びに監視対象は、それぞれ、“駐車場”の代わりに資材置き場やゴミ集積場、“駐車車両”の代わりに資材やゴミに置き換えることが可能となる。
【発明を実施するための最良の形態】
【0015】
以下、図面にもとづいて本発明の実施形態を説明する。
【0016】
図1は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムの基本構成を示す。
【0017】
本駐車監視システムは、GPS衛星4からの電波を受信する、各駐車エリアの駐車車両の直下に埋め込まれたアンテナ(以降、GPSセンサ3と表現する)によって取得したGPS情報(ID、位置)に基づいて、各駐車エリアにおける駐車車両の有無を判定する駐車監視装置1と、LAN(Local Area Network) 接続して駐車監視装置1からデータを受信する管理者用の端末装置2とから構成される。
【0018】
さらに、駐車監視装置1は、GPSセンサ3を介して衛星からのGPS情報を受信するデータ受信部11、受信したGPS情報をGPS基本情報テーブルとして基本データベース100に登録し、ある時刻における駐車の有無を当該GPS基本情報テーブルを参照して判定する処理部12、および駐車状況に関するデータを管理者の端末装置2に送信するデータ送信部13から構成されている。
【0019】
ここで、GPS受信基本テーブルは、GPSセンサ3毎に作成され、基本データベース100に格納し、駐車有無の判定処理毎に参照を行なう。また、履歴データベース200に格納される履歴テーブルは、日毎に作成して格納され、後述する補完判定処理の毎に参照を行なう。
【0020】
また、端末装置2は、駐車監視装置1から送信される駐車状況のデータを受信するデータ受信部21、ディスプレイに表示するための加工を行う処理部22、駐車状況のデータを表示する表示部23、および入力操作を行う操作部24から構成されている。
【0021】
そして、端末装置2において、(1)駐車状態判定結果に基づいた駐車有無、(2)隣接車両の影響により、“不明”と判定されたGPSセンサ3の状況、(3)補完判定の結果、“異常”と判定されたGPSセンサ3の状況等を表示して、管理者への情報提供がなされる。
【0022】
なお、駐車監視装置1、および端末装置2は、図示していないCPU(Central Processing Unit )、メモリを備えたコンピュータである。
【0023】
図2は、本発明の実施の形態になる駐車監視システムにおけるGPSセンサによる衛星電波受信の構成例を示す。
【0024】
屋外の駐車スペースに衛星からのGPS情報(ID、位置)を受信するアンテナを埋設し、このアンテナ(以降、GPSセンサ3と表現)による受信状態に基づいて障害物の有無検知を行なうものである。
【0025】
GPSセンサ3は、駐車スペース毎に1個以上設置する。その際、GPSセンサ3は、“点”としてGPS情報を受信することとなるが、判定する対象が“面”であることから、仮想的に勢力範囲(図3に後述)を設定し、GPSセンサ3の判定結果は、この勢力範囲に対して一様の結果として扱うものとする。
【0026】
GPS衛星4は複数存在し、障害物の無い地点では、3個以上のGPS衛星4の電波を受信することで、地球上での位置検出が可能となる。また、常に同じ軌道を通り、同じ衛星のGPS情報を出力するため、同時刻であれば、受信対象となる衛星及びその衛星の位置は同一となる。これを利用することによって、本発明では、電波の強弱という従来のアナログ的な判定方式ではなく、GPS情報の受信可否によるデジタル的な判定を可能とするものである。
【0027】
障害物が無い場合には、同時刻にGPS衛星から同一の情報を受信することができる。そこで、障害物(=駐車車両)の無い状態で、1日のGPS衛星4の状態を受信し、テーブル化しておく(図4に示すGPS受信基本テーブル)。
【0028】
そして、同時刻におけるGPS受信基本テーブルを参照し、GPSセンサ3の受信状況と比較することによって、障害物の有無の判定は、a.GPS受信基本テーブルと同じであれば、「駐車車両無し」と判定し、b.GPS受信基本テーブルより受信可能なGPS衛星が減少していれば、「駐車車両有り」と判定する。上記のような判定を行うことにより、駐車スペース毎、および駐車車両の有無毎に、電波の測定及び閾値の設定は不要となる。
【0029】
また、GPS情報を取得することで、GPSセンサ3本来の位置検出が行なうことが可能となる。例えば、駐車場のレイアウトが変更された場合など、本来、GPSセンサ3毎に、“実際の駐車スペースの勢力範囲−GPSセンサ3の位置−GPSセンサ3のID”のデータを人為的に関連付ける必要があるが、GPSセンサ3の位置が自動的に検出されるため、登録作業が不要となり、作業の軽減と設定ミスを回避することができる。
【0030】
図3は、隣接する駐車車両の車高とGPS衛星の高度の関係を示す。GPS衛星4の位置およびGPSセンサ3の位置関係については、上述したように自動的に得られる情報であるため、これらを用いることによって自GPSセンサから見た以下の関係を算出することができる。
【0031】
GPS受信基本テーブルには、GPSセンサ3から見たGPS衛星4の高度に関係なく受信可能な衛星が登録される。そのため、GPS衛星4の高度が低い場合には、隣接する駐車車両の影となり、自GPSセンサ上には駐車車両5が存在しないのに、GPS衛星4の情報が受信できず、“駐車車両有り”と判断されてしまう。
【0032】
そこで、こうした状況を回避するため、本発明では、以下の定義及び判定を行なう。
【0033】
GPS衛星4の高度の高低を判断するため、駐車車両5の高さに基準H(閾値)を設ける。検知対象が車両であることから、通常は法令上の車高とする。なお、この基準は独自に設定しても良い。
【0034】
GPS衛星の仰角をθ、GPSセンサ3の勢力範囲の境界までの距離をIとすると、勢力範囲(L=IX2)境界におけるGPS衛星の高度Hθについて、以下の場合分けができる。
a.Hθ≧hの場合:GPS衛星が図の(1)のエリアにある場合で、隣接する車両の影響を受けないため、隣接するGPSセンサ3の結果によらず、自GPSセンサの判定結果を採用する。
b.H≧Hθ≧hの場合:GPS衛星が図の(2)のエリアにある場合で、隣接するGPSセンサ3が“駐車車両無し”と判定した場合には、自GPSセンサ3の判定結果を採用する。
c.h≧Hθの場合:GPS衛星は図の(3)のエリアにある場合で、隣接するGPSセンサ3が“駐車車両有り”と判断し、GPSセンサ3単独による判定は不可能であるため、“不明”として管理者へ状況通知を行なう。
【0035】
上述したように、a.b.による判定を通常処理として、駐車車両の有無を監視することができる。しかしながら、衛星からの情報を基にしていることから、判定が不安定になることが予想される。
【0036】
図3は、本発明の実施の形態になるGPS情報の受信状態を表す図である。時間経過に対するGPS情報受信の状態を模式的に示したものであり、(a)は、通常処理として、駐車車両の有無を明確に監視することができる場合、(b)は、受信状態が不安定で、駐車車両の有無が判定できない場合を示している。
【0037】
(b)の場合に、不安定な状態の時間tを計測し、さらに判定保持時間T(任意)を設け、このtとTの関係から以下の補完処理を行なう。
t≦Tの場合:判定保持時間内で判定結果が安定していることから、直前の判定結果を採用する。
t>Tの場合:不安定な状態が判定保持時間以上に経過していることから、直前の判定結果を採用することは相応しくない。このような状況に対しては、日毎に採取した履歴と比較して判定を行なう。
【0038】
しかし、単純に比較する場合には、前述した通り、GPS衛星が毎日同じ起動を取ることから、サンプリング単位に全ての駐車パターンを採取し、それとのマッチングを行なうこととなる。これでは、全ての比較対象となる履歴データの採取は困難であり、マッチング対象も膨大な量になる。これを回避するため、以下の方法により行なう。
(1)日単位で、一定時間毎に各GPSセンサ3による駐車状態を採取する。
(2)判定に影響を及ぼす他の駐車エリア(GPSセンサ)が予想する。これは、GPSセンサ3毎に影響するGPSセンサ3を重み付けテーブルに登録しておくことで実現される。上記重み付けテーブルは、以下の観点から作成する。
【0039】
判定に影響が予想される範囲は、自GPSセンサ3に隣接するGPSセンサ3上にある駐車車両が対象となるが、隣接する駐車車両においても、縦横に隣接する場合と斜めや開口部、通路に接している場合があって影響度が異なる。
【0040】
そこで、GPSセンサ3毎に受信可能なGPS衛星4の軌道は、後述する図5のGPS受信基本テーブルに基づいて、判定に使用するGPS衛星を特定し、時刻毎に影響される方向を定める。
(3)受信不安定な状態が判定保持時間以上に経過した場合、(2)に基づいて(1)の同時刻の駐車状態をチェックし、自GPSセンサ(不安定な状態)以外が同じ判定結果にマッチングしたときの判定結果を採用する。
【0041】
なお、マッチングを行なう時には、(2)に記したとおり、判定に使用するGPS情報は特定できているため、該当分とのマッチングを行なうだけで良い。
(4)(3)に該当しない場合には、“異常”として管理者へ状況通知を行なう。
【0042】
図5は、本発明の実施の形態になるGPS受信基本テーブルのデータ構成を示す。GPS受信基本テーブルは、受信の「取得時刻」、「位置計測」、「受信状態」、および「受信衛星1〜N(ID、位置)」の項目からなる複数のレコードで構成されている。例えば、第一のレコードでは、00:00:00の時刻において、位置計測(a,b,c)のGPSセンサ3が受信可能の状態にあり、それぞれのIDと位置を有するN個の受信衛星が登録されている。
【0043】
GPS衛星4からのGPS情報(ID、位置情報)は、障害物が無い場合には、同時刻に同一の情報として受信することができ、駐車車両の無い状態で、1日GPS衛星の状態を受信し上記GPS受信基本テーブルを作成する。そして、同時刻において、GPS受信基本テーブルとGPSセンサ3の受信状況を比較し、駐車車両の有無の判定を行なう。
【0044】
つまり、GPS受信基本テーブルと同じであれば、「駐車車両無し」とし、GPS受信基本テーブルより受信可能なGPS衛星が減少していれば、「駐車車両有り」と判定される。
【0045】
図6は、本発明の実施の形態になるGPSセンサによる駐車有無の判定に関する履歴テーブルのデータ構成を示す。履歴テーブルは、日単位で、一定時間毎に各GPSセンサ3における駐車状態を採取したものであり、「取得時刻」および「センサ1〜N」の駐車車両の有無の項目からなる複数のレコードで構成されている。なお、図6では、GPSセンサは単にセンサと表現している。
【0046】
図7は、本発明の実施の形態になるGPSセンサの重み付けテーブルのデータ構成を示す。GPSセンサ3による駐車有無の判定に影響が予想される範囲は、自GPSセンサ3に隣接するGPSセンサ3上にある駐車車両である。また、隣接する駐車車両においても、縦横に隣接する場合と斜めや開口部、通路に接している場合で、影響度が異なる。そこで、実施例では、GPSセンサ3毎に影響するGPSセンサ3を重み付けできるテーブルに登録するものである。重み付けテーブルは、各GPSセンサ3毎に影響する他センサの「センサ名」をランク付けしたものである。なお、図7でも同様に、GPSセンサは単にセンサと表現している。
【0047】
図8は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フローを示す。
【0048】
まず、ステップS11において、GPS衛星4から発信されているGPS情報(ID、位置情報)を取得する。ステップS12において、衛星からの受信状態が安定しているか否かを判定する。安定状態にあれば、ステップS13において、GPS受信基本テーブルを参照し、照合することによって受信可能衛星の数が減少しているかを判定する。
【0049】
照合の結果、受信衛星数に減少がなければ、ステップS14で、当該駐車エリアの駐車車両はなしと判定する。受信衛星数が減少していれば、ステップS15において、Hθ≧Hの条件を判定する。すなわち、衛星高度Hθが車高の閾値H以上であれば、ステップS17で、駐車車両有りと判定する。衛星高度Hθが車高の閾値H未満であれば、ステップS16において、隣接駐車エリアに駐車車両があるかを判定する。隣接駐車エリアに駐車車両がなければ、ステップS17で、駐車車両有りと判定する。
【0050】
また、隣接駐車エリアに駐車車両があるときには、ステップS18で、「不明」として処理し、ステップS19で、管理者への通知を行う。
【0051】
一方、ステップS12において、GPSセンサ3の衛星電波の受信状態が不安定であれば、図9の判定補間処理を行う。
【0052】
図9は、本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フロー(続き)を示す。本実施例は、図8の判定フローの続きとして、判定補間処理を行うものである。
【0053】
ステップS21において、予め設定した状態保持時間Tと通信不安定にある時間tとの比較を行い、t>Tであれば、ステップS22において、履歴テーブルを参照し、同時刻の履歴とのマッチング判定を行なう。同時刻の隣接駐車エリアの駐車状態をチェックし、自GPSセンサ(不安定な状態)以外が、同じ判定結果にマッチングしたときの判定結果を採用する。なお、マッチングを行なう時には、判定に使用するGPS情報は特定できているため、該当分とのマッチングを行なうだけで良い。
【0054】
一方、マッチングしていなければ、ステップS23において、「異常」と判定し、ステップS24で、管理者へ当該状態を通知する。また、マッチングしていれば、ステップS25において、駐車車両の補間判定を行う。
【0055】
補間判定において、隣接駐車エリアに駐車車両があれば、ステップS26で、駐車車両有りと判定する。また、隣接駐車エリアに駐車車両がなければ、ステップS28で、駐車なしと判定する。
【0056】
一方、ステップS21において、t≦Tであれば、ステップS27において、駐車の直前の状態を判定する。駐車の直前の状態が該当すれば、ステップS26で、駐車車両有りと判定し、駐車の直前の状態に該当しなければ、ステップS28で、駐車車両なしと判定する。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態になるGPSセンサを利用した駐車監視システムの基本構成を示す図である。
【図2】本発明の実施の形態になる駐車監視システムにおけるGPSセンサによる衛星電波受信の構成例を示す図である。
【図3】隣接する駐車車両の車高とGPS衛星の高度の関係を示す図である。
【図4】本発明の実施の形態になるGPS情報の受信状態を表す図である。
【図5】本発明の実施の形態になるGPS受信基本テーブルのデータ構成を示す図である。
【図6】本発明の実施の形態になるGPSセンサによる駐車有無の判定に関する履歴テーブルのデータ構成を示す図である。
【図7】本発明の実施の形態になるGPSセンサの重み付けテーブルのデータ構成を示す図である。
【図8】本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フローを示す図である。
【図9】本発明の実施の形態になるGPSセンサを利用した駐車監視システムにおける車両有無の判定フロー(続き)を示す図である。
【図10】従来例−その1(カメラによる駐車監視)を示す図である。
【図11】従来例−その2(検知センサによる駐車監視)を示す図である。
【図12】従来例−その3(輪留め埋め込みセンサによる駐車監視)を示す図である。
【図13】GPSセンサを用いた駐車監視の問題点(隣接する車両による影響)を示す図である。
【符号の説明】
【0058】
1 駐車監視装置
2 端末装置
3 GPSセンサ
4 GPS衛星
5 車両
11 データ受信部
12 処理部
13 データ送信部
21 データ受信部
22 処理部
23 表示部
24 操作部
【特許請求の範囲】
【請求項1】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、
を有することを特徴とする駐車監視方法。
【請求項2】
前記アンテナによるGPS電波の受信が不安定となる場合に、前記駐車車両の有無を判定する判定保持時間を設定し、受信不安定の時間が該判定保持時間内であるとき、直前の受信によって判定することを特徴とする請求項1に記載の駐車監視方法。
【請求項3】
前記自アンテナに隣接する他アンテナの重み付けが登録された隣接アンテナの重み付けテーブルに基づいて、隣接駐車エリアの駐車車両有無の結果を加味して判定することを特徴とする請求項1に記載の駐車監視方法。
【請求項4】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置におけるプログラムであって、
コンピュータに、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、
を実行させる駐車監視プログラム。
【請求項5】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置であって、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較する手段と、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定する手段と、
を有することを特徴とする駐車監視装置。
【請求項1】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視方法であって、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、
を有することを特徴とする駐車監視方法。
【請求項2】
前記アンテナによるGPS電波の受信が不安定となる場合に、前記駐車車両の有無を判定する判定保持時間を設定し、受信不安定の時間が該判定保持時間内であるとき、直前の受信によって判定することを特徴とする請求項1に記載の駐車監視方法。
【請求項3】
前記自アンテナに隣接する他アンテナの重み付けが登録された隣接アンテナの重み付けテーブルに基づいて、隣接駐車エリアの駐車車両有無の結果を加味して判定することを特徴とする請求項1に記載の駐車監視方法。
【請求項4】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置におけるプログラムであって、
コンピュータに、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較するステップと、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定するステップと、
を実行させる駐車監視プログラム。
【請求項5】
各駐車エリアに埋め込まれたアンテナによってGPS電波を受信して駐車車両を監視する駐車監視装置であって、
前記アンテナの間隔と受信したGPS衛星の仰角から算出される衛星の高度と予め設定された駐車車両の車高の閾値とを比較する手段と、
前記衛星の高度が前記車高の閾値より大きい場合に、自アンテナだけで駐車車両の有無を判定し、および前記衛星の高度が前記車高の閾値より小さい場合には、隣接アンテナによる駐車車両の有無の結果を加味して判定する手段と、
を有することを特徴とする駐車監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−237928(P2009−237928A)
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2008−83621(P2008−83621)
【出願日】平成20年3月27日(2008.3.27)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成20年3月27日(2008.3.27)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]