
株式会社ダイヘンにより出願された特許
251 - 260 / 990
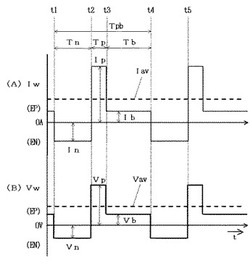
パルスアーク溶接の出力制御方法
【課題】消耗電極交流パルスアーク溶接において、小電流域の溶滴移行状態を良好にする
【解決手段】電極マイナス極性ベース電流Inの通電、ピーク電流Ipの通電及びベース電流Ibの通電を1パルス周期として繰り返して溶接を行う。第n回目のパルス周期の開始時において、溶接電圧設定値と溶接電圧の検出値との電圧誤差に応じて溶接電流変化量を算出し、配分比率α(0≦α≦1)及びベース期間配分比率β(0≦β≦1)を設定し、溶接電流変化量及び配分比率αからピーク電流Ipの変化量を制御し、溶接電流変化量、配分比率α及びベース期間配分比率βからベース電流Ib及び電極マイナス極性ベース電流Inの各変化量を制御する。上記のα及びβによって各電流値の変化量が適正化されるので、小電流域の溶滴移行状態が良好になる。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム

【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
直流抵抗溶接機用トランス
【課題】一次コイルと二次コイルとの間の漏れ磁束を減少させて、製作が容易な溶接トランスを提供する。
【解決手段】本発明の溶接トランス31は、二次コイル33が第1コイル41乃至第4コイル44から成り、それぞれが板状でUの字に形成されて同一方向を向き、第1コイル41及び第2コイル42が一次コイル32の外側に設けられ、第3コイル43及び第4コイル44が一次コイル32の内側に設けられ、第1コイル41と第3コイル43とを並列に接続して、この出力端子が第1整流素子10に接続されている。また、第2コイル42と第4コイル44とを並列に接続して、この出力端子が第2整流素子11に接続されている。第1コイル41及び第3コイル43の入力端子と、第2コイル42及び第4コイル44の入力端子とが接続されてセンタータップ14を成している。入力容量を低減させ小型軽量化が可能となる。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
ワーク搬送システム
【課題】アライナ装置を備えたワーク搬送システムにおいて、ワーク搬送用ロボットによるワーク搬送時の位置精度の向上を図る。
【解決手段】ワーク搬送システムA1は、搬送室2と、搬送室2に隣接し、薄板状のワークWを積層状に収納するためのワーク収納室1と、搬送室2に隣接するワーク処理室と、ワーク収納室1と上記ワーク処理室との間でワークWを搬送するための搬送用ロボット4と、ワークWの垂直軸O4周りの回転位置を合わせるためのアライナ装置6と、を備え、アライナ装置6は、ワークWを保持するワーク保持部62と、ワーク保持部62を回転させる回転駆動機構と、ワーク保持部62を昇降させるワーク保持部昇降機構と、を備える。ワーク保持部62の昇降動作により、アライナ装置6に対するワークWの受け渡しが可能であるので、搬送用ロボット4の昇降ストロークを比較的に短くすることができる。
(もっと読む)
受配電設備
【課題】構成の簡素化を図り、設置面積の縮小とコストの低減とを図ることができる受配電設備を提供する。
【解決手段】変圧器タンク1の上蓋2に、変圧器タンクと共に接地電位に保たれる付属機器収納容器10を取り付け、変圧器タンクの上蓋に取り付けられた一次ブッシング端子B1u〜B1w及び二次ブッシング端子B2u〜B2wを付属機器収納容器10内に配置する。外部から引き込まれる高圧ケーブルHCと一次ブッシング端子との間に挿入される一次側開閉器S1u〜S1wと、外部に引き出される低圧ケーブルLCと二次ブッシング端子との間に挿入される二次側開閉器S21〜S23とを付属機器収納容器10内に収納して付属機器側ユニット100を構成する。すべての充電部を付属機器収納容器10内に配置して外部から隠蔽する。
(もっと読む)
電源装置
【課題】 効率よく電子部品を冷却することができる電源装置を提供すること。
【解決手段】 複数の電子部品2と、ファン4とを備え、ファン4から吐出された空気が送り込まれる送り込み口を有する長手状の風路6が形成され、風路6を流れる空気によって複数の電子部品2が冷却されるように構成された電源装置A1であって、上記送り込み口は、風路6の長手方向に移動可能である。このような構成によると、風路6における吸熱能力の高い位置を移動させることができる。これにより、複数の電子部品2のうち特定のものの温度が過度に上昇することを抑制することができる。その結果、複数の電子部品2を効率的に冷却することができる。
(もっと読む)
アーク加工用電源装置
【課題】 被加工物の切断作業のとき、手ぶれによって切断トーチを形成するチップに大きな電圧が印加されてチップ等の部品が劣化する。
【解決手段】 商用交流電源を整流及び平滑して直流電圧を出力する直流電源回路と、直流電圧を高周波交流電圧に変換するインバータ回路と、高周波交流電圧を溶接に適した交流電圧に変換する主変圧器と、主変圧器の出力を整流する2次整流回路と、整流された出力電流を検出する出力電流検出回路と、出力電流値に基づいて前記インバータ回路を制御する主制御回路と、を備えたアーク加工用電源装置において、前記主制御回路は、出力電流値が予め定めた出力電流基準値以上のとき、最大負荷電圧を予め定めた値に降圧させた最大負荷電圧特性を形成する外部特性制御を行う、ことを特徴とするアーク加工用電源装置である。
(もっと読む)
マグ溶接の短絡電流制御方法
【課題】マグ溶接において、スプレー移行形態における溶接状態の安定性を向上させる。
【解決手段】溶接ワイヤ1と母材2との短絡Sdを検出し、この短絡中の短絡電流の上昇速度を制御するマグ溶接の短絡電流制御方法において、短絡Sdの期間長さが基準期間未満であるときは微小短絡であると判別して微小短絡の発生頻度Ndを算出し、この微小短絡の発生頻度Ndに応じてインダクタンス設定値Lrを変化させることによって短絡電流の上昇速度を変化させる。この微小短絡の発生頻度Ndとして、単位時間当たりの微小短絡の回数を使用する。これにより、スプレー移行形態であることを正確に判別して短絡電流の上昇速度を適正化するので、溶接性能が向上する。
(もっと読む)
マニピュレータのキャリブレーション方法及びロボット制御システム
【課題】
マニピュレータのキャリブレーションをどこでも簡単に行うことができ、治具の準備などの作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことが可能であり、マニピュレータに求められる本来の作業を行うための不必要な待ち時間や工数を削減する。
【解決手段】
複数の観測位置姿勢毎にレーザ変位センサLSにより治具Gの直線部上の点をそれぞれ検出する。検出した値から直線部上の検出点のロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法によりマニピュレータのキャリブレーションを行う。
(もっと読む)
251 - 260 / 990
[ Back to top ]