
株式会社ジェイテクトにより出願された特許
1,031 - 1,040 / 7,053
車両用操舵装置
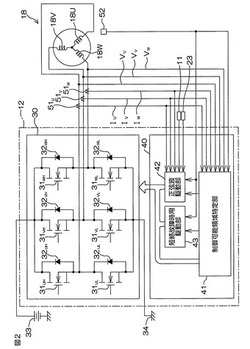
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】6つのFET31のうちの1つが短絡故障した場合には、制御可能領域特定部41は、電動モータ18の駆動を停止させた後、短絡故障が発生しているFETを特定するための処理を行なう。つまり、制御可能領域特定部41は、まず、各相の相電圧に基づいて、短絡故障が発生しているFETの上下段の位置(ハイサイドまたはローサイド)を特定する。次に、制御可能領域特定部41は、特定された上下段位置と、U相、V相およびW相の相電流のうちの2つの相電流とに基づいて、電圧短絡故障が発生しているFET31の相を特定する。
(もっと読む)
カム機構及び駆動力伝達装置

【課題】カム機構を作動させるためのトルク及びサイズの増大を抑制しながらカム機構の一対のカム部材が中立状態から相対回転することを抑制することが可能なカム機構、及びカム機構を備えた駆動力伝達装置を提供する。
【解決手段】カム機構7は、第1のカム面702a,712aを有する第1のカム溝702,712、及び第1のカム溝702,712よりも浅い第2のカム溝703,713がそれぞれの対向面に形成されたメインカム70及びパイロットカム71と、メインカム70及びパイロットカム71の間に介在する第1のカムボール72及び第2のカムボール73とを備え、第1のカムボール72は、第1のカム溝702,712を周方向に転動することでメインカム70及びパイロットカム71を離間させる方向のカム推力を発生させ、第2のカムボール73は、中立状態において第2のカム溝703,713に嵌合する。
(もっと読む)
電動パワーステアリング装置
【課題】電源の電力消費とモータの出力特性とを限界以下に抑えることによって、トルク詰まりなどの違和感が出ないようにする。
【解決手段】電源の消費電力を推定し、操舵補助モータの出力を算出し、電源の消費電力が限界に近い場合、あるいはモータの出力特性が限界に近い場合、電力消費率に応じて補正されたモータ電流指令値Iq1*と、モータの出力率に応じて補正されたモータ電流指令値Iq2*との小さいほうに基づいて、前記操舵補助モータを制御する。
【効果】モータ電流指令値として、より低くなる方向に変化した値を適用することができるので、電力消費率やモータ出力率が急激に増大して、本来ならば電源やモータの出力特性が限界に達して操舵トルクの急激な増加が起こる場合に、この現象を予め避けることができる。
(もっと読む)
動力伝達装置
【課題】 スタビライザが他の部材と干渉することを防止した動力伝達装置を提供する。
【解決手段】 スタビライザ6に、支持軸7の軸方向に平行にのびる貫通孔22が形成された取付け部21が設けられるとともに、支持軸7に、支持軸径方向外方に突出する突出部24および突出部24の先端から支持軸軸方向にのびる挿通軸部23が設けられており、支持軸7の挿通軸部23とスタビライザ6の取付け部21の貫通孔22とは、支持軸7とスタビライザ6との支持軸軸方向への相対移動が不可能なように嵌め合わされている。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドルの戻し時に操舵の回転方向によるステアリング装置各部や車両の回転方向でのフリクションの左右差の影響で、ハンドル戻り特性に左右差が生じてしまい、右と左の操舵からの戻りの戻しトルク感、戻り速度、戻り角の特性に大きなアンバランスが生じる欠点があった。
【解決手段】モータ回転速度が無負荷回転数相当となった場合の操舵トルクを、判定された電動モータの回転方向別に記憶するメモリ88と、タイヤが路面から受けるタイヤの路面反力に相当するトルクに対して、前記メモリ88に記憶された各電動モータの回転方向における操舵トルクの前記回転トルク既定値に対する割合を係数として、トルク左右差の調整をする回転トルクの左右差調整部87とを備え、前記基本アシスト制御部71によって決定されたアシストトルクに対して、回転トルクの左右差調整部87によって調整された路面反力に相当するトルクを減算することにより、ハンドル戻し制御を行う。
(もっと読む)
ころ軸受用保持器及びころ軸受
【課題】ポケット枠の変形を抑制することができて、ころの円滑な転動を確保できるころ軸受用保持器及びころ軸受を提供すること。
【解決手段】保持器5は、本体部50と、ポケット部60とを有する。周方向に隣接する柱部53の間には略矩形のポケット部挿入孔54を形成している。ポケット部60は、ポケット部挿入孔54に圧入されている。各柱部53は、平面図において略等脚台形の形状を有し、各柱部53の保持器5の周方向の幅は、保持器5の径方向の内方側から外方側へ行くにしたがって大きくなっている。ポケット部60の端面81は、凸部63を有する一方、各柱部53の端面71は、凹部72を有する。凸部63は、凹部72に係合し、ポケット部60の端面81のうち、柱部53に対して最も大きい接触面圧で接触するようになっていて、最大接触面圧部を構成している。
(もっと読む)
電動パワーステアリング装置
【課題】二系統のモータを同期制御する制御装置の演算負荷を軽減できる電動パワ−ステアリング装置を提供する。
【解決手段】モータ制御指令出力手段31は、第1指令値演算手段30により生成された第1の指令値とモータ駆動系毎の電流をモータ駆動系電流加算手段により加算された電流値に基づき、第2指令値演算手段34,35により演算された第2指令値をモータ制御指令としてモータとこのモータを駆動する駆動回路から構成される二系統のモータ駆動系に出力する。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
磁気式エンコーダ装置
【課題】回転体の回転状態の検出精度を向上させることができる磁気式エンコーダ装置を提供すること。
【解決手段】筒状磁性体101は、薄肉の筒状体に形成されている。筒状磁性体101の外周面105は中心軸線Cを中心とする円筒面をなしている。筒状磁性体101の内周面106は、モータ回転軸2の取付部分2Aの外郭形状と整合する形状、すなわち中心軸線Cを中心とする正四角筒面をなしている。隣接する磁極部107,108同士の各境界部分Bが、筒状磁性体101の正四角筒面からなる内周面106の角部に相当する部分に位置している。磁気式エンコーダ102の外周面(筒状磁性体101の外周面105)に微小な隙間を空けて、ホール素子103が対向配置されている。
(もっと読む)
四輪駆動車
【課題】車両の旋回時における駆動力伝達系の衝撃を低減することが可能な四輪駆動車を提供する。
【解決手段】四輪駆動車101は、トルクを発生するエンジン102と、エンジン102のトルクを第1及び第2のギヤ機構41,42を介して前輪104L,104R及び後輪105L,105Rに伝達する駆動力伝達系106と、駆動力伝達系106に設けられ、後輪105L,105Rへのトルク伝達量を制御可能な多板クラッチ7と、後輪105L側へ伝達されるトルクの一部を軸方向の推力に変換して多板クラッチ7を押圧する押圧機構8とを備え、前輪104L,104Rの舵角が最大値まで変化した場合でも、多板クラッチ7の入力側に連結された中間シャフト54と出力側に連結されたドライブシャフト115Lとの差動回転方向が反転しないように第1及び第2のギヤ機構41,42のギヤ比を設定する。
(もっと読む)
1,031 - 1,040 / 7,053
[ Back to top ]