
ソニー株式会社により出願された特許
33,181 - 33,190 / 34,172
ビデオテープレコーダ及び記録方法
【課題】 本発明は、ビデオテープレコーダ及び記録方法に関し、特にHDTV(High Definition TeleVision)によるビデオ信号を磁気テープに記録するビデオテープレコーダに適用して、全体を効率良く構成することができるようにする。
【解決手段】 本発明は、検索用データについては、デコード時におけるビデオデータの時刻管理情報を基準にして、表示用データについては、ビデオデータの再生出力の時刻管理情報を基準にして記録する。
(もっと読む)
撮像装置

【目的】 リモコン機能を有する液晶モニターを使用し、TV等の受信装置やVTR等の受信装置と送受信し、液晶モニターにTV映像を表示したり、VTRにTV映像を記録したり、再生画を液晶モニターで表示できるようにした撮像装置を得る。
【構成】 本発明の撮像装置は、ビデオカメラ本体101に設けられ且つ被写体を撮像する撮像部(ビデオカメラ機構部)と、その撮像部により撮像された撮像画像を表示する液晶パネル部117と、撮像画像を記録する記録部(VTR機構部)と、ビデオカメラ本体に設けられると共に撮像画像の記録部への記録開始を制御するスタート/ストップボタン(第1の記録操作部)106と、液晶パネル部117の近傍に設けられると共に撮像画像の記録部への記録開始を制御するスタート/ストップボタン(第2の記録操作部)133と、を有する。
(もっと読む)
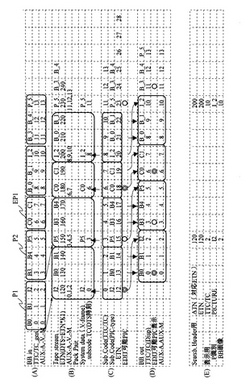
コンテンツ再生装置及びトリックモード再生システム
暗号化コンテンツトランスポートストリームが顧客コンピュータ(16)により受信され、その後の再生のために記録される。記録中、トランスポートストリームにおけるパケットのヘッダ内のキーが取り出され、キーテーブルに順に配置される。また、キーテーブルはキー指示ビットの変化を示す。暗号化コンテンツの再生が望まれる場合、PUSI及び/又はRAIビット等のフレーム開始指示ビットを用いてキーテーブルにアクセスし、再生されることになっているトランスポートストリームパケットの復号化に必要なキーを取り出す。  (もっと読む)
(もっと読む)
スキュー検出方法及び光ピックアップ並びに光ディスク装置
光ディスク(102)のウォーブルグルーブに沿いトラッキングサーボを行うときに、光ピックアップ(104)を利用して、光ディスク(102)のメインスポットに対応する反射光束を光検出手段(32)の主受光部(321)で受光することにより出力されるメインウォーブル信号と、光ディスク(102)の各サイドスポットに対応する反射光束を第1副受光部(322)と第1副受光部(322)で受光することによりサイドスポット毎に出力されるサイドウォーブル信号との位相誤差を検出し、この両位相誤差の差分を差分算出回路(59)で算出し、この差分から光ディスク(102)の傾き方向と傾き量を含むスキュー信号を生成するように構成した。  (もっと読む)
(もっと読む)
生体情報測定装置及び方法
【課題】 非拘束、無意識のうちに体脂肪率等の生体情報を測定する。
【解決手段】 生体情報測定装置1は、インナーイヤー型イヤーレシーバ形状のセンサ素子10R,10Lと、2つの電極31,32を有すると共に音楽等の再生が可能な本体部30とが、配線50を介して接続されてなる。センサ素子10R,10Lは導電性を有する素材で構成されており、本体部から電力が供給されることにより電極として機能する。測定に際して、被験者は、本体部30を片手で把持して電極31,32を掌に接触させると共にセンサ素子10R,10Lを両耳に装着する。そして、手と耳との間のインピーダンスを測定して解析することにより被験者の体脂肪率等の生体情報を求める。
(もっと読む)
反応装置、反応装置の運転方法、燃料電池及び電子機器
【課題】
本発明の課題は、要求される生成物の量に応じて、流体の反応条件を変えることなく化学反応を行い、加熱のエネルギーに対する反応効率を低下させることなく生成物を供給することができる反応装置を提供することである。また、その反応装置を使って効率的な反応を行うことができる反応装置の運転方法を提供することである。
【解決手段】
本発明は、微細な複数の流路を設け、流路で行われる化学反応を流路毎に制御することにより、要求される生成物の量を使用する流路の数で調節するとともに加熱に必要なエネルギーの調節も行うことができる。すなわち、生成物の必要量が少量であっても、加熱のエネルギー量に対する反応効率を下げることなく反応を行うことができる。
(もっと読む)
ロボット装置の制御システム及び制御方法
【課題】 複数台のロボットが協調的に動作し、全体としてある特定の目的を実現するマルチロボット・システムに関する。
【解決手段】 マルチロボット・システムは、舞台上で活動する複数のロボットと、舞台上のロボットの動作を監視するモニタ・システムと、マルチロボットの運用を行なう統括コントローラで構成される。統括コントローラは、ロボットの状態と、モニタされた位置及び方向に基づいて、ロボットに対する動作指示や、ロボットに対する位置及び方向の補正指示、異常発生(若しくは予測)時におけるロボットへの動作指示を、無線LAN経由でリアルタイムに行なう。
(もっと読む)
研磨装置および研磨方法
【課題】被研磨面上での面内分布の悪化を回避して、CMP後における被研磨面の高平坦化を可能にしつつ、高い研磨レートを確保して十分な削り込み量をも得られるようにする。
【解決手段】研磨定盤2上に貼付された研磨パッド1と被研磨物の被研磨面とが互いに対向するように当該被研磨物を研磨ヘッド3に装着し、前記研磨パッド1と前記被研磨面とを相対的に摺擦させることによって研磨を行って当該被研磨面を平坦化するのにあたり、磁性体が混入された研磨用スラリーを供給して前記研磨パッド1と前記被研磨物との間に介在させ、前記研磨パッド1と前記被研磨物との間に介在する前記研磨用スラリー中における前記磁性体の分布状態を、磁力を発生させることによって可変させる。
(もっと読む)
ロボット装置及びその制御方法
【課題】
エンターテインメント性や有用性を向上させ得るロボット装置の制御方法を提案する。
【解決手段】
可動部を駆動する動力源としてのモータの回転を、実行すべき行動内容に応じて制御すると共に、当該モータの回転状態を検出し、検出したモータの回転状態に基づいて、可動部に作用する外力の大きさを推定し、外力の大きさの推定結果に基づいて、外力の大きさと、当該外力によるモータの回転状態の変位量とが予め設定された調整ゲインを比例定数とする比例関係となるように、モータの回転を制御し、状況に応じて、制御手段に設定された調整ゲインを変更するようにした。
(もっと読む)
フィルム構造体の形成方法及びフィルム構造体
【課題】大面積かつ軽量であり、ナノサイズ程度の微細凹凸も可能な凹凸パターンを有するフィルム構造体及びその形成方法を提供することを目的とする。
【解決手段】モールド3の凹凸パターン4をフィルム10の表面に転写して凹凸パターンを形成するフィルム構造体20の形成方法であって、モールド3の凹凸パターン4又はその近傍、もしくはフィルム10の表面又はその近傍に、選択的に光を吸収する光吸収層5を設け、フィルム10をモールド3と加圧手段2との間に配置し、加圧手段2を加圧した状態で光Lを照射して、モールド2の表面の温度を上昇せしめ、フィルム10の表面に凹凸パターンを形成する。
(もっと読む)
33,181 - 33,190 / 34,172
[ Back to top ]