
セイコーエプソン株式会社により出願された特許
2,171 - 2,180 / 51,324
水晶振動片、ジャイロセンサー、電子機器、水晶振動片の製造方法
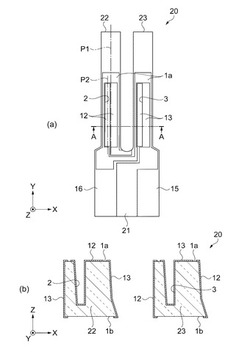
【課題】水晶のエッチング異方性に起因する振動特性の劣化が抑制された水晶振動片、その水晶振動片を用いたジャイロセンサー、それらを備えた電子機器、および水晶振動片の製造方法を提供する。
【解決手段】基部21、および基部21から延伸する振動腕22を備え、振動腕22の第1の面1aに開口部を有する有底の溝2が形成され、溝2は、第1の面1aにおいて開口部の中心を通って且つ振動腕22の延伸方向に沿った仮想の線P2が、溝2が形成される前の振動腕22の重心を通って且つ振動腕22の延伸方向に沿う仮想の線P1に対して平行するいずれかの方向にずれた位置に配置されて設けられた水晶振動片としての振動素子20の製造方法であって、水晶ウェハー第1の面1aに塗布されたフォトレジスト膜に、同一のフォトマスクを用いて基部21および振動腕22の外形形状と溝2の開口部形状とを露光する工程を含んでいる。
(もっと読む)
電気機械装置、ロボット、移動体及び電気機械装置の製造方法

【課題】電気機械装置のローター部を樹脂化するとともに、捻れ強度を強くする。
【解決手段】電気機械装置であって、中心軸230と、前記中心軸230の外周に沿って配置されたローター磁石200を有するローター20と、前記ローター20の外周に配置されたステーター15と、を備え、前記中心軸230は、炭素繊維強化プラスチックで形成されており、前記炭素繊維強化プラスチック中の炭素繊維231Aの向きと、前記中心軸230の方向との為す角が45°である。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】小型軽量で温度上昇を抑えて安定駆動することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む長方形の振動体1と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に、周波数の値を第1の周波数記憶値として記憶し、電圧を上限電圧値に設定し、周波数を調整して位相差を所定の範囲内に保つ制御を行い、周波数が、第1の周波数記憶値から、振動体1の共振周波数の温度特性に基づいて予め定められた第1の値を超えて変化した場合に、周波数の値を第2の周波数記憶値として記憶し電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
ロボット及び移動体
【課題】供給電圧の変更に柔軟に対応可能なモータ制御技術を提供する。
【解決手段】駆動制御回路(200)は、電磁コイルに供給電圧VSUPを断続的に供給するためのドライバ回路(250)と、ドライバ回路(250)に供給するスイッチング信号を生成するスイッチング信号生成回路(240)と、供給電圧指令値Yaをスイッチング信号生成回路(240)に供給する電圧設定部(270)とを備える。スイッチング信号生成回路(240)は、供給電圧指令値Yaに応じてスイッチング信号DRVA1,DRVA2のパルス幅を調整することによって、電磁コイルに印加される実効電圧を調整する。
(もっと読む)
吐出装置、及び液状体供給システム
【課題】吐出手段における液圧を一定に維持するために、液状体を供給する装置が複雑になったり、装置のコストが増大したりすることを抑制することができる吐出装置、及び液状体供給システムを提供する。
【解決手段】吐出装置は、液状体を吐出する吐出手段と、シリンダーと、シリンダーの内壁に、内壁との間を気体又は液体が通過することを略阻止するとともに、摺動自在に勘合したピストンと、シリンダーとピストンとで形成された液溜室と、吐出手段と、を連通させる液状体流路と、錘によってピストンを液溜室側に付勢する錘付勢手段と、を備える。
(もっと読む)
ロボット制御方法、ロボット
【課題】エンコーダーが故障したとき、ジャイロセンサーを用いて退避移動が可能なロボット制御方法を提供する。
【解決手段】ロボット制御方法は、モーターと、前記モーターの回転角度を検出する角度センサーと、前記モーターに連結されるアームと、前記アームに取り付けられる慣性センサーと、を備えるロボット制御方法であって、前記ロボットの作業動作中において、前記角度センサーの異常を検出する工程と、前記角度センサーの異常を検出したときに前記角度センサーが故障したと判定し、前記アームの退避移動経路を決定することと、前記慣性センサーを用いて故障した前記角度センサーの角速度および角度を演算する演算工程と、前記演算工程で取得した演算結果に基づき、前記退避移動経路に従い退避移動動作を行う工程と、を有する。
(もっと読む)
危険検知方法およびロボット
【課題】統合的に危険を検知し、危険回避行動を実行させることができる危険予知方法およびその方法により危険予知を実行するロボット
【解決手段】装置に複数備えるセンサーの検出値を取得する検出工程と、前記検出値から危険度を演算する危険度演算工程と、前記危険度と、安全性閾値と、を比較し前記センサーが装着される部位の安全性を判定する部位危険度判定工程と、前記危険度の各々に重み係数を乗じ、前記重み係数が乗じられた補正危険度を総和した総危険度を求める総危険度演算工程と、前記総危険度と、総危険度閾値と、を比較し総危険度を判定する総危険度判定工程と、を備える危険検知方法。
(もっと読む)
駆動装置、これを備えたテープ印刷装置およびステッピングモーターの制御方法
【課題】2つの駆動部に対する駆動部毎のトルク制御を、簡単且つ適切に行うことができる。
【解決手段】動力源を構成するステッピングモーターであるカッターモーター63と、カッターモーター63の正回転が入力されて駆動するフルカッター61と、カッターモーター63の逆回転が入力されて駆動するハーフカッター62と、カッターモーター63を制御する制御部200と、を備え、制御部200は、フルカッター61の負荷およびハーフカッター62の負荷に応じて、カッターモーター63に印加する正回転および逆回転における駆動パルスの周期をそれぞれ可変する変調手段を有している。
(もっと読む)
ロボット、およびロボットの制御方法
【課題】ハンド部が換装された場合でも対象物の良否を簡単に判定する。
【解決手段】ハンド部の重量に関するハンド情報をハンド部に記憶しておく。対象物を把持したハンド部からアーム部が受ける荷重を検出すると、その荷重の中から対象物による荷重の成分をハンド情報に基づいて決定し、得られた対象物の荷重に基づいて、対象物の良否を判定する。こうすれば、ハンド部が換装されると自動的にハンド情報も変更されるので、アーム部にかかる荷重からハンド部による荷重を排除して、対象物の良否を精度良く判定することが可能となる。
(もっと読む)
2,171 - 2,180 / 51,324
[ Back to top ]