
三菱電機株式会社により出願された特許
251 - 260 / 33,312
電源監視装置
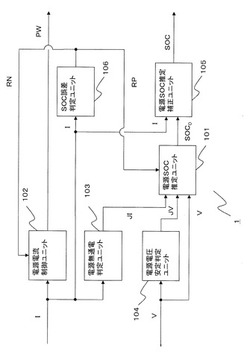
【課題】車両に搭載された電源の充電状態を精度高く監視することができる電源監視装置を提供する。
【解決手段】電源電流制御ユニット102により回転電機3の界磁電流をPWM制御する界磁電流PWM制御信号PWを制御して、電源装置2に流れる電源電流値を零若しくは零近傍の値となるように無通電制御し、所定期間内に於いて電源装置2の電源端子間電圧値Vの変動が所定の範囲内にあることを電源電圧安定判定ユニット104が判定したとき、電源充電状態推定ユニット101により電源装置2の電圧値Vに基づいて電源装置2の充電状態を推定する。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法

【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
高圧系統保護機器の動作試験装置及び動作試験方法
【課題】現地での試験装置の構築に時間がかからないようにする
【解決手段】一次側に電圧調整器SDを介して商用電源CPSが接続される試験用単相変圧器Tの二次側出力巻線の一端に一方の端子が他端に他方の端子がそれぞれ接続され地絡電圧検出器V0Sが接続される地絡電圧検出端子V0T、二次側出力巻線に直列に接続され地絡電流検出器I0Sが接続される地絡電流検出端子I0T、高圧母線HVBの負荷開閉器64より電源側に接続される電源側出力端子POT、高圧母線HVBの負荷開閉器64より負荷側に接続される負荷側出力端子LOT、二次側出力巻線の一端及び他端と電源側出力端子POT及び負荷側出力端子LOTとの接続を切り替えることにより高圧母線HVBに流れる試験用地絡電流の方向を電源側から負荷側への方向と負荷側から電源側への方向とに選択的に切り替える地絡電流方向切り替えスイッチSWを一体的に備えている。
(もっと読む)
半導体基板の欠陥検査装置および半導体装置の製造方法
【課題】半導体基板の欠陥検査において、高精度かつ効率的に、可視光透過性を有する半導体基板の表裏面への焦点位置合せを行うこと。
【解決手段】
半導体基板の欠陥検査装置は、焦点位置合わせマークが表面に形成された可動ステージと、可視光を可動ステージに向けて照射する光源と、可動ステージに対向して設けられた対物レンズと、対物レンズが結像した画像を電気信号に変換する光電変換素子と、焦点位置合わせマークの可動ステージ上の位置および被検査物となる半導体基板の厚さが登録され、可動ステージと対物レンズの位置関係を制御する制御装置を備えている。制御装置は、登録された焦点位置合わせマークを基準にして半導体基板の裏面側の焦点位置合わせを行い、登録された半導体基板の厚さを基準にして半導体基板の表面側の焦点位置合わせを行う。
(もっと読む)
波面センサ及び補償光学系
【課題】処理の高速化と低コスト化を図ることのできる波面センサを得る。
【解決手段】二次元検出器10の水平走査と垂直走査の少なくとも一方の走査方向において、予め設定した複数の部分画像領域12を読み出すように走査し、かつ、複数の部分画像領域12以外の画像領域を走査しないように制御する。複数の部分画像領域12は走査方向に対して平行な所定の幅を有し、かつ、略等間隔に配置される。レンズレットアレイを構成するレンズレットの配列間隔は二次元検出器10の部分画像領域12の間隔と等しく構成され、レンズレットで結像された多数の集光点パターンが二次元検出器10の部分画像領域12で検出されるよう構成されている。
(もっと読む)
レーダ画像処理装置
【課題】簡便な方法で目標候補領域と目標モデルとの比較を行うレーダ画像処理装置を得る。
【解決手段】領域判定処理部6が、領域形成処理部5が生成した目標候補領域に外接する外接領域を設定する領域設定処理部7と、領域設定処理部7が設定した外接領域の形状およびサイズから、レーダによる目標候補領域の観測方向を算出し、算出した観測方向から目標物を観測した場合の3次元形状と、目標候補領域の3次元形状とを比較し、目標候補領域が目標物であるか判定する目標判定処理部9とを備える。
(もっと読む)
異物検知装置
【課題】異物の誤検知を緩和した異物検知装置を提供する。
【解決手段】背景データ取得部10は、撮像装置2の出力するライン状の強度画像のうちの閾値判定部22で異物が検知されなかった画像を、背景保存ウィンドウサイズ40aのデータ量だけ背景データとして保存し、背景ウィンドウサイズ40b分の強度値から閾値13aを算出する。異物検知部20は、検知対象の強度画像のうちの背景ウィンドウサイズ40b分の強度値から平均強度値21aを算出し閾値13aと比較して異物の有無を検知する。誤検知除去部30は、誤検知判定ウィンドウ上下限値40cに応じたサイズの誤検知判定ウィンドウに入らない異物検知画素を誤検知と判断して除去した上で最終的な異物の有無を判定する。
(もっと読む)
光3次元カメラ
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
水質測定装置
【課題】電極ホルダ式の場合のようにホルダの内部に導管を設けることが困難な場合でも適用可能で、髪の毛などの異物を除去することができ、検出部の汚れをつき難くした水質測定装置を提供する。
【解決手段】筒状に形成され水中に浸漬される部分に水質の検出部2が設けられた検出器ホルダ5と、この検出器ホルダの外周部に一体的に設置され所定時に上記検出部を洗浄するための洗浄流体を通流させる洗浄流体通路6と、この洗浄流体通路に接続され上記洗浄流体を上記検出部に向けて噴射するように設けられた流体噴射部8を備えるようにした。
(もっと読む)
251 - 260 / 33,312
[ Back to top ]