
アスモ株式会社により出願された特許
171 - 180 / 1,622
車載カメラ用ノズル装置、清掃装置付き車載カメラ、及び車載カメラ用清掃システム
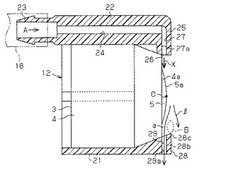
【課題】その目的は、凸状のレンズのレンズ表面に対して頂点を越えた下流側まで充分に圧縮空気を行き亘らせることができる車載カメラ用ノズル装置を提供する。
【解決手段】車載カメラ用ノズル装置12は、車載カメラ3の凸状のレンズ5のレンズ表面5aに圧縮空気Aを供給してレンズ表面5aに付着した異物を除去するためのものである。車載カメラ用ノズル装置12は、レンズ5の外周からレンズ表面5aに圧縮空気Aを噴出する噴出口26を備えている。また、車載カメラ用ノズル装置12は、レンズ5よりも圧縮空気Aの下流側となる位置に設けられて分岐流路29を形成し、噴出口26から噴出された圧縮空気Aを分岐流路29の内側と分岐流路29の外側とに分岐する分岐突出部28を備えている。
(もっと読む)
ブラシ装置及びブラシ装置を備えたモータ

【課題】本発明の目的は、整流子とブラシとの当接面における接触面圧を整流子回転上流側と下流側とで変化させることにより接触抵抗を変化させ、ブラシと整流子とが離間する際に生じる火花放電を防止することが可能なブラシ装置及びブラシ装置を備えたモータを提供することにある。
【解決手段】一方向に回転する整流子4と当接する当接面Tを、厚み方向の前端面に有するブラシ本体11と、このブラシ本体11を、整流子4方向に付勢する付勢手段13と、を備えたブラシ装置に関する。
付勢手段13は、当接面Tの整流子4回転上流側に向けて、ブラシ本体11を押圧する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】目標停止位置に精度良く、短時間で停止させることができるモータ制御装置及びモータ制御方法を提供すること。
【解決手段】モータ制御装置は、回転センサ11で検出した検出回転速度と検出回転量とに基づいて目標停止位置でモータMを停止させるための制御部12を備える。制御部12は、そのときの検出回転速度に基づいて最大制動状態としたときの最大制動回転量を算出し、その最大制動回転量が、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量と一致すると最大制動状態とする電力をモータMに供給し最大制動制御を行い、その後、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量とそのときの検出回転速度とに基づいて目標停止位置でモータMが停止する回転速度を算出しその算出した回転速度となるように制動力を生じさせる電力をモータMに供給する動作を繰り返す速度制御を行う。
(もっと読む)
動力伝達装置
【課題】 入力軸の正転時と逆転時とで、等速の動力伝達と減速の動力伝達とを単純な構成で切り替える動力伝達装置を提供する。
【解決手段】 動力伝達装置10は、回転フレーム50に保持された動力伝達ユニット20がシャーシ17、18の間に配設される。回転フレーム50は、ワンウェイクラッチ15、16により、入力軸11の正転(時計回り方向の回転)時、正転力を等速で出力軸12に伝達し、逆転(反時計回り方向)時、回転が拘束される。一方、動力伝達ユニット20は、ワンウェイクラッチ25により、入力軸11の正転時は回転が拘束され、逆転時は入力軸11の逆転力を歯車21〜24を介して減速し、出力軸12に伝達する。これにより、外部制御装置や他動力による動力伝達装置を使用せず、入力軸11の正転時と逆転時とで、等速動力伝達と減速動力伝達とを切り替えることができる。
(もっと読む)
アームヘッド
【課題】腐食生成物の進行を遅らせることができ、ひいては早期の外観の悪化を抑えることができるアームヘッドを提供すること。
【解決手段】アームヘッド11は、長手方向の一端部に連結孔11bを有し、その連結孔11bを貫通するリベットを中心としてリテーナが回動可能に連結される。連結孔11bの開口端11cとその開口端11cよりも径方向外側で径方向に延びる外側面11dとの間には、軸方向に沿った断面が凹状で90°の角度をなす2つの面11e,11fが形成される。
(もっと読む)
動力伝達装置
【課題】 入力軸の正転時と逆転時とで等速動力伝達と減速動力伝達とを自動的に切り替える動力伝達装置を提供する。
【解決手段】 動力伝達装置10において、入力軸11の正転(時計回り方向の回転)時、入力軸11の正転力は、ワンウェイクラッチ30を経由して等速で出力軸12に伝達される。このとき、出力側副軸52に対して入力側副軸51が空転する。一方、入力軸11の逆転(反時計回り方向)時、入力軸11の逆転力は、ギア41、42により入力側副軸51に減速して伝達され、入力側副軸51からツーウェイクラッチ50を介して出力側副軸52に伝達され、ギア43、44により出力側副軸52から出力軸12へ減速して伝達される。このとき、中間軸13に対して出力軸12が空転する。これにより、ワンウェイクラッチ30とツーウェイクラッチ50とが共に動力伝達状態となるデッドロックの発生を防止する。
(もっと読む)
異物検出装置の製造方法
【課題】製造時における作業性が高く、製造コストが安価な異物検出装置の製造方法を得る。
【解決手段】内側に電極線18、20及びスペーサ102が設けられた外皮部14を、その長手方向一端側から押出成形機106に通過させる。これにより、押出成形機106を通過した外皮部14の周囲にはプロテクタ30が形成される。このように、感圧センサ12とは別体で構成したプロテクタ30の筒部32に感圧センサ12を挿入するのではなく、押出成形によって外皮部14の周囲にプロテクタ30を形成する。このため、プロテクタ30の筒部32に感圧センサ12を挿入するという煩雑な作業が不要になり、異物検出装置10の製造をするうえでの作業性が向上し、製造コストも安価になる。
(もっと読む)
直流モータ
【課題】ブラシの損傷を低減させ、ブラシの長寿命化を図ることができる直流モータを提供することにある。
【解決手段】直流モータ1は、セグメントSGの数を、ティースT(スロットSL)の数の2倍である20個にした。さらに、セグメントSGの数にあわせて巻線Cの数を20個にしている。そして、各巻線C(順巻巻線Cf、逆巻巻線Cb)の巻数を、スロット(ティース)の数とセグメントの数が等しい直流モータの巻線の巻数に比べて半分に減らしている。これによって、第1〜第10順巻巻線Cf1〜Cf10及び第1〜第10逆巻巻線Cb1〜Cb10のインダクタンスを小さくすることができる。
(もっと読む)
内接型遊星歯車減速機及び歯車ポンプ
【課題】インナギアとアウタギアとの噛み合いに伴って発生する振動を抑える。
【解決手段】内接型遊星歯車減速機20は、インナギア22及びアウタギア24を備えている。このインナギア22及びアウタギア24は、互いの噛合面22A,24Aの直径D1,D2及び歯22C,24Cの歯厚T1,T2が軸方向に変化している。この構成によれば、インナギア22及びアウタギア24の軸方向のがたつきを抑制することができるので、インナギア22とアウタギア24との噛み合いに伴って発生する振動を抑えることができる。しかも、噛合面22A,24Aの直径D1,D2及び歯22C,24Cの歯厚T1,T2が軸方向に変化しても、インナギア22の噛合面22Aとアウタギア24の噛合面24Aとの噛合状態が確保されているので(噛合面22A,24A同士が面接触するので)、単位面積あたりの衝撃が少なくなり、振動を更に抑えることができる。
(もっと読む)
複合遊星歯車機構及び減速モータ
【課題】軸方向に小型化された複合遊星歯車機構を得る。
【解決手段】複合遊星歯車機構50によれば、入力側フェース歯車52及び出力側フェース歯車60を用いることで、複数の第一遊星歯車54及び複数の第二遊星歯車56は、モータシャフト32の軸方向と直交する方向を軸方向として配置されている。しかも、この複数の第一遊星歯車54及び複数の第二遊星歯車56と噛合される入力側第一歯面64及び入力側第二歯面66が同心円状に形成されることにより、複数の第一遊星歯車54及び複数の第二遊星歯車56は、モータシャフト32の軸方向と直交する同一平面上に配置されている。従って、従来の複合遊星歯車機構に比して、軸方向に小型化することができる。
(もっと読む)
171 - 180 / 1,622
[ Back to top ]