
タツモ株式会社により出願された特許
41 - 50 / 73
光学フィルムの搬送方法,搬送装置およびその搬送用ベルト
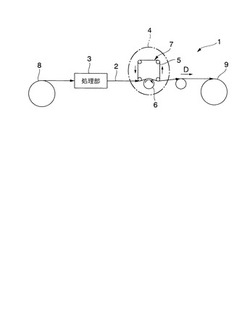
【課題】光学フィルムを搬送して処理部で所定の処理を行うために、搬送用ベルトとロールが、広いニップ面積で光学フィルムと接触してこれを良好に搬送することができる光学フィルムの搬送方法を提供する。
【解決手段】処理部3で光学フィルム2に所定の処理を行うために光学フィルムを搬送する方法は、無端帯状の搬送用ベルト5の外周面をロール6に押し付け、搬送用ベルト外周面とロールとの間に光学フィルムを挟んだ状態で搬送用ベルトとロールを回転させて光学フィルムを搬送する。
(もっと読む)
ウェハ用真空加熱装置

【課題】シャッタに長手方向の熱変形を生じた場合でも、ガイド孔内を摺動する複数のシャフトを介してシャッタを円滑に昇降させることができるようにする。
【解決手段】ウェハ用真空加熱装置10は、シャッタ3にシャフト4,5を介して駆動機構7から昇降動作の移動力を供給する。シャフト5を上側の第1部材51と下側の第2部材52との2分割に構成し、上側の第1部材51に形成した係合片513がシャッタ3の長手方向(矢印X方向)に摺動する係合溝521を下側の第2部材に形成した。シャフト4の上端部及び第1部材51をシャッタ3に固定した。シャッタ3に矢印X方向の熱膨張を生じた場合には、第1部材51が第2部材52に対して矢印X方向に変位し、シャフト4及び第2部材52に変形を生じることがない。
(もっと読む)
通信記録装置、およびこれを備えた障害解析装置
【課題】簡易な構成により、自動搬送障害の早期原因究明を可能にする通信記録装置およびこれを備えた障害解析装置を提供する。
【解決手段】通信記録装置20は、D−sub25インタフェースを介して、半導体製造装置16およびAMHSコントローラ12にそれぞれ接続される。通信記録装置20は、タイムスタンプの基になる時間情報を計測するように構成されたシステムクロック42を備える。さらに、通信記録装置20は、半導体製造装置16およびAMHSコントローラ12との間で通信される信号の変化内容を、変化内容ごとにタイムスタンプを付加した上で、第1の通信情報としてRAM44に記録するように構成されたマイコン30を備える。
(もっと読む)
アライナ装置
【課題】反りのあるウェハに対しても適切な位置合わせを行うことが可能なアライナ装置を提供する。
【解決手段】アライナ装置10は、エッジセンサ22、変位センサ24、および制御部20を備える。エッジセンサ22は、ウェハ100のエッジ位置を検出する。変位センサ24は、真空チャック12とエッジセンサ22との間に配置され、ウェハ100までの距離を測定するように構成される。制御部20は、変位センサ24の検出結果に基づいて、ウェハ100の断面形状を表す近似式を算出し、算出した近似式の長さに基づいてウェハ100のエッジ位置を算出するように構成される。
(もっと読む)
アライナ装置
【課題】フィルムが貼付されたウエハに搬送位置の誤差や反りを生じている場合にも、ウエハの外周端の位置を撮像範囲の比較的小さいリニアスキャンカメラで正確に検出する。
【解決手段】アライナ装置10に、リニアスキャンカメラ2、変位センサ6、面振追従機構3、偏心追従機構4を設けた。ウエハWが1回転する間に、変位センサ6の検出結果に基づいてウエハWの外周端がリニアスキャンカメラ2の被写界深度内に位置するように面振追従機構3を動作させ、リニアスキャンカメラ2の撮像データに基づいてウエハWの外周端がリニアスキャンカメラ2の撮像範囲内に位置するように偏心追従機構4を動作させる。ウエハWが回転している間におけるウエハWの外周端の垂直方向及び水平方向の位置に追従して、リニアスキャンカメラ2を、ウエハWに対して相対的に、垂直方向及び水平方向に移動させる。
(もっと読む)
光学フィルム加圧装置
【課題】 この発明の目的は、延伸されるべき光学フィルムを安定的に保持することを可能にする光学フィルム加圧装置を提供する。
【解決手段】 光学フィルム加圧装置30は、フレーム部34およびベルトユニット36を少なくとも備える。フレーム部34は、延伸部18に取り付け可能に構成される。ベルトユニットは、加圧ローラ183に圧接するようにフレーム部34に支持される。ベルトユニット36は、光学フィルム11を介して加圧ローラに圧接するように配置される無端ベルト38と、この無端ベルト38を張架する複数のガイドローラ(40、42、44、46、48、50、52)とを備える。この結果、ニップロール方式のように加圧ローラ同士が圧接するのではなく、無端ベルト38が光学フィルム11を介して加圧ローラ183に圧接するようになる。
(もっと読む)
塗布装置
【課題】被塗布材に供回りする容器を備え、容器内の気密性を良好に維持できる塗布装置の提供を図る。
【解決手段】塗布装置1は、スピンナー4とインナーカップ3とを備える。インナーカップ3は、Oリング33と蓋部材32と底部材31とを備え、内部に収容するワーク99とともにスピンナー4に供回りする。Oリング33は、弾性体材料により構成された無端状のものである。蓋部材32は、周壁部322を周縁に備える円盤状のものである。周壁部322は、Oリング33の外周側に当接する。底部材31は、周壁部312を周縁に備える円盤状のものである。周壁部312は、Oリング33の内周側に当接する。底部材31の回転時に、遠心力により周壁部312が蓋部材32の周壁部322よりも大きく外周側に歪む。
(もっと読む)
ウェハ搬送用ハンドおよびウェハ搬送ロボット
【課題】可動爪の往復移動をガイドする際に発生する粉塵を回収し易くすることが可能なウェハ搬送用ハンドおよびウェハ搬送ロボットを提供する。
【解決手段】ウェハ搬送用ハンド20は、表面がアルマイト処理されたアルミニウムからなるハンド本体21を備える。ハンド本体21の内部には、駆動部25と、この駆動部25により往復移動を行うように構成された連結プレート24A〜24Dが設けられる。ウェハ搬送用ハンド20は、さらにガイド部材26A、26B、28C、および28Dを備える。ガイド部材26A、26Bは、ハンド本体21のハンド表面における可動爪22A、22Bと接触しない位置に埋め込まれるように配置される。ガイド部材26A、26Bは、ハンド本体21の内部において連結プレート24A、24Bの往復移動をガイドするように構成される。
(もっと読む)
基板処理装置及び基板製造方法
【課題】異物が付着していない状態での基板の上面の全面に対する光学センサの受光量の変化に基づいて異物の有無を判別する際の閾値情報を作成し、基板に起伏を生じている場合でも基板上における異物の有無を正確に検出できるようにする。
【解決手段】この発明は、定盤1、塗布ヘッド3、センサ4,5及び制御部8を備えている。制御部8は、塗布ヘッド3が処理液を吐出していない状態で移動方向Y1に沿って移動する間におけるセンサ4,5の検出信号を時系列的に記憶し、この記憶内容に基づいて移動方向Y1に沿って連続した検出データの閾値データを作成する。制御部8は、塗布ヘッド3が処理液を吐出している状態で同じ基板100の上面の全面に対して移動する間に、検出データと閾値データとを比較した結果に基づいて基板100の上面における異物の有無を判別し、この判別結果に基づいて塗布ヘッド3の移動を制御する。
(もっと読む)
ウェハクランプ装置
【課題】ウェハが破損するのを防止しつつウェハをクランプすることが可能なウェハクランプ装置を提供する。
【解決手段】ウェハ位置合わせ装置1は、シリンダ44と、アーム機構41〜43と、を備えている。シリンダ44は上下方向に延びている。アーム機構41〜43は、第1アーム41a,42a,43aと、第2アーム41b,42b,43bと、ばね41c,42c,43cと、を備えている。第1アーム41a,42a,43aは、シリンダ44の上方に載置されたウェハの半径方向に沿って往復移動自在にシリンダ44に支持される。第2アーム41b,42b,43bは、第1アーム41a,42a,43aに半径方向に沿って移動自在に嵌合しウェハの周縁に当接する。ばね41c,42c,43cは、第1アーム41a,42a,43aと第2アーム41b,42b,43bとを弾性的に接続する。
(もっと読む)
41 - 50 / 73
[ Back to top ]