
株式会社日立ハイテクノロジーズにより出願された特許
971 - 980 / 4,325
自動分析装置
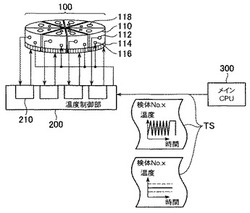
【課題】希釈や前処理時に、検体に応じた複数の温度制御が可能な自動分析装置を提供することにある。
【解決手段】検体前処理機構は、希釈ディスク100を備える。希釈ディスク100は、複数の希釈ディスクユニット110を備える。各ディスクユニット110は、温度制御部200により、個別に温度制御可能である。温度制御部200は、例えば、時系列的に温度を変化させる温度プログラムにより、ディスクユニット110の温度を制御する。複数のディスクユニット110は、各ディスクユニット110毎に脱着が可能である。
(もっと読む)
真空処理装置及び真空処理方法

【課題】真空処理室でプラズマ処理が再開可能な異常が発生した場合に、オペレータによる長時間のウエハの処理再開操作待ちによりウエハに成膜された金属膜の腐食が進行する問題が考慮されていなかった。
【解決手段】本発明はプラズマ処理を行う真空処理室と、洗浄処理を行う洗浄処理装置とを備え、表面に金属膜の単層または金属膜を含む積層膜が成膜されたウエハを腐食性ガスにより、プラズマ処理する真空処理装置において、真空処理室に異常が発生し、プラズマ処理が中断されたウエハを所定時間経過後に、プラズマ処理が中断されたウエハを洗浄処理装置へ搬送し、洗浄処理を行うシーケンスを有する制御手段を備えたことを特徴とする真空処理装置である。
(もっと読む)
荷電粒子線装置
【課題】本発明は、試料上に不純物を付着させることなく、試料を取り扱うことが可能な荷電粒子線装置を提供することを目的とするものである。
【解決手段】以上のような目的を達成するために、真空室内にて移動する移動部材の摺動部分に潤滑剤を塗布した走査型電子顕微鏡において、当該潤滑剤として、低分子成分が除去されたものを採用する。これによって、試料汚染を抑制することが可能となり、試料測定後のプロセスにおける不良発生の抑制が可能となる。
(もっと読む)
稠密スロット透過型電極体を用いたプラズマ処理装置
【課題】プラズマ分布、プラズマ電位、エッチング特性あるいは表面処理特性が時間的、空間的に変動し、制御性および信頼性の高いプラズマ処理装置(プラズマエッチング装置あるいはプラズマ表面処理装置)を実現することが困難であった。
【解決手段】放電形成用電磁波の少なくとも一部を透過型電極体を介して処理室内に導入する。透過型電極体は、透過型電極層を少なくとも構成要素の一部としており。透過型電極層には、細長形状のスロット開口領域が稠密に形成されている。この透過型電極体はRFバイアス用電磁波あるいはイオンプラズマ振動の電磁波にとっては電気的伝導性を有する材料のように振る舞い、プラズマ特性およびプラズマ処理特性の高安定化、高信頼性化を実現する。
(もっと読む)
ステージ装置,それを用いた荷電粒子線装置及び縮小投影露光装置,およびステージ制御方法
【課題】高速かつ高精度位置決めを実現できるステージ装置,それを用いた荷電粒子線装置及び縮小投影露光装置,およびステージ制御方法を提供することにある。
【解決手段】ステージ装置は、ステージ10を駆動するモータ30と、モータにより駆動されるステージの位置が最終目標位置となるような前記アクチュエータの駆動量を算出するステージ制御演算器100を有する。ステージ制御演算器100は、ステージの目標位置とステージの位置の差分に基づいて、PID制御する補償演算器120を有する。また、ステージの特性を同定するモデル同定器130と、モデル同定器によって得られた情報を基に、補償演算器におけるステージ制御用補償パラメータを演算する制御ゲイン演算器140を備える。
(もっと読む)
真空処理装置
【課題】真空雰囲気と大気雰囲気とを切り替える真空室内における異物低減とスループット向上を両立できる真空処理装置を提供する。
【解決手段】複数のプロセス処理装置、該プロセス処理装置のそれぞれに試料を搬送するための真空搬送室、真空搬送室内に設置され試料の搬送を行う真空搬送ロボットと、大気中で、複数の試料を収納したカセットを備え、カセット内に収納された試料を搬送するための大気搬送室、該大気搬送室内に配置され試料の搬送を行う大気搬送ロボットと、前記真空搬送装置と大気搬送装置との間に配設されたロック室とを備えた真空処理装置において、前記真空処理装置を構成する室は、ベント用バルブ207を介して乾燥ガスを供給するガス供給路209とロック室内の湿度を検出する湿度センサ211を備え、真空排気に際して湿度が所定値以下となるまで前記ベント用バルブを開いて乾燥ガスを供給して、液体微粒子の発生を抑制する。
(もっと読む)
電子部品の搭載装置
【課題】電子部品を表示基板に搭載する際に行う位置合わせの精度を向上させる。
【解決手段】支持体に対して回転可能に取り付けられた筐体と、筐体に対して回転可能に接続されて、電子部品の搭載を行う搭載ヘッドとを備える。そして、搭載ヘッドを回転させるモータと、筐体内に収納されて、搭載ヘッドの回転制御を行う制御部とを備える。この制御部は、ネットワークを通じて角度情報を受信する通信部と、角度情報に応じた数のパルスを生成する位置決めパルス生成部と、位置決めパルス生成部と有線で接続され、該位置決めパルス生成部で生成されたパルスの数に基づいて、モータを動作させるモータ駆動部とを備える。
(もっと読む)
検査装置、および検査方法
【課題】試料の高さ方向のばらつきを検査する。
【解決手段】試料29を保持するホルダ211と、ホルダ211に保持された試料29帯電処理する帯電制御部23と、ホルダ211に保持された試料29に電圧を印加するリターディング電源24と、リターディング電源24により電圧が印加された試料29に向けて電子線を照射して、試料29の表面近傍で引き戻されたミラー電子を結像させる電子光学系20と、ミラー電子を結像させることで得られたミラー画像を画像処理する画像処理部27と、を有する。画像処理部27は、ミラー電子を結像させることで得られたミラー画像と、予め用意された標準品のミラー画像との差に応じた情報を、試料29の高さ方向のばらつきとして出力する。
(もっと読む)
自動分析装置及び自動分析方法
【課題】試料と試薬を混合し、混合液の経時的な変化を測定する自動分析装置において、反応過程に現れる検体固有の直線範囲を自動的に決定又は予測する技術を提供する。
【解決手段】本発明は、反応過程データを関数で近似し、当該関数に基づいて反応初期及び又は後期の曲線部分を自動的に判定する。曲線部分を除いた直線範囲を検体ごとに決定し、決定した直線範囲の吸光度データを用いて検査値を算出する。また、本発明は、反応過程の途中までに得られた吸光度データに基づいて反応初期の直線開始時刻を自動的に判定し、当該直線終了時刻と事前に予定した直線終了時刻とに基づいて直線範囲を予測し、その結果に基づいて予測値を算出する。
(もっと読む)
走査電子顕微鏡及びそれを用いた試料の観察方法
【課題】
観察試料と対物レンズ等の試料室内の構造物の接触を未然に、かつ確実に防止することが可能な、使い勝手の良い走査電子顕微鏡を提供する。
【解決手段】
走査電子顕微鏡の試料室内壁近傍から非接触で観察試料の有無を検出する物体検出手段を設け、観察試料を試料室へ導入する際に、試料移動機構制御手段により試料移動機構を自動的に水平及び垂直方向に移動させつつ、物体検出手段による物体検出情報に基づいて観察試料の高さを自動的に算出し、手動操作入力手段から移動指示に応じて試料移動機構の移動する際には、先に算出した観察試料の高さの情報に基づいて試料移動機構の移動量に制限を加える。
(もっと読む)
971 - 980 / 4,325
[ Back to top ]