
国立大学法人金沢大学により出願された特許
271 - 280 / 282
走査型プローブ顕微鏡および分子構造変化観測方法
走査型プローブ顕微鏡は、カンチレバーと、液中に存在するカンチレバーと試料を相対走査する走査機構と、液中または試料中に存在するケージド化合物に解除光を照射する照射機構とを有している。  (もっと読む)
(もっと読む)
スイゼンジナを用いた食品及び医薬組成物
【課題】 スイゼンジナの乾燥粉末、抽出物又はその処理物の食品及び医薬組成物としての用途を提供する。
【解決手段】 免疫賦活作用、血糖降下作用及び抗肥満作用を有するスイゼンジナの乾燥粉末、抽出物又はその処理物を含有する食品及び医薬組成物。
(もっと読む)
固体燃料燃焼方法、固体燃料燃焼器およびそれを使用した固体燃料式エンジン

【課題】固体燃料として難燃性でありながら、一端燃えだすと燃焼火力が強いとされる固体プラスチック燃料を用いた固体燃料燃焼方法を提供する。 【解決手段】プラスチックの固体燃料を加熱して液状化した層に、電磁波を放射し、液状燃料を電磁波によって一気に加熱気化し、気化した燃料を燃焼することで強力な燃焼火力を得ることができる固体燃料燃焼方法である。難燃性プラスチックを固体燃料として使用することができ、この結果大きな燃焼火力を得ることができる。また、難燃性プラスチックを燃料とするため、極めて安全性が高く(燃えにくいため)取り扱いも容易である。 (もっと読む)
塑性変形型造形方法およびその装置

【課題】手作業による鍛金作業のような自由鍛造も行うことができ、また塑性粘土や厚みのある板材でも塑性変形を行うことができる塑性変形型造形方法及びその装置を提供すること。
【解決手段】ハンマ11の打撃により被加工材21に塑性変形を与えて加工を行う塑性変形型造形方法であって、ハンマ11の打撃方向に対して等高線加工を行うように、複数の加工層ごとに工具経路を生成する場合に、あらかじめ設定している複数の経路モードの中から被加工材21に応じて最適経路モードを決定することを特徴とする塑性変形型造形方法。
(もっと読む)
加工装置、加工装置の制御方法および工具ステーション
【課題】工具に対する工作物の位置ずれを補償し、工作物の加工ばらつきに対応した正確な面取り加工を行う。
【解決手段】少なくとも6自由度を持つ多関節型ロボット10と、少なくとも3自由度を持つ工具ステーション30とを備え、多関節型ロボット10によって工作物21を保持し、工具ステーション30に設けた工具38を用いて工作物21を加工する加工装置において、多関節型ロボット10によって、加工前ストッカー22から工作物21を取り出して加工位置に搬送し、工具ステーション30に設けた撮影手段により工作物21を撮影して工作物21の加工位置情報を検出し、検出した加工位置情報に基づいて工具ステーション30を動作させて工具38の位置を設定する。工具38の位置を設定後、工具38を動作させて工作物21の加工を行い、加工完了後、多関節型ロボット10により工作物21を加工後ストッカー23に搬送する。
(もっと読む)
イチゴ由来の薬物代謝酵素阻害剤及びその製造法
【課題】 安全性の高い薬物代謝酵素阻害剤を提供する。
【解決手段】 イチゴ由来でシトクロムP−450 3A4阻害活性を示す物質を有効成分として含有する薬物代謝酵素阻害剤;イチゴ由来でシトクロムP−450 3A4阻害活性を示す新規化合物;及びイチゴを抽出し、得られた抽出物を精製することを特徴とする前記化合物の製造法。
(もっと読む)
インドール誘導体を有効成分とするα2受容体遮断剤及び血管拡張剤
【課題】 五環系縮合複素環化合物であるヨヒンビンよりも構造が単純で、ヨヒンビンに類似する作用を有する化合物を見出す。
【解決手段】 式(I):
【化1】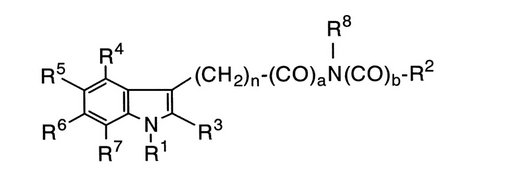
(式中、R1は水素、アルキル基、アルケニル基、アルキニル基、芳香族基、アラルキル基、アシル基、アリールスルホニル基、アルキルスルホニル基又は水酸基;R2は炭化水素基を表し;R3、R4、R5、R6及びR7は、同一又は異なり、水素、ハロゲン、アルキル基又はアルコキシ基;R8は水素又はアシル基;nは1〜6の整数を表し;a及びbは、同一又は異なり、1又は0)
で示される化合物又はその薬学的に許容される塩を含有するα2受容体遮断用医薬又は食品組成物。
(もっと読む)
ハードウエア記述言語合成ツール及びそれを利用した集積回路の設計方法
【課題】C言語などの高位レベル言語で記述されたプログラムから自動的にハードウエア記述言語で記述されたハードウエア設計ファイルを形成することができるハードウエア記述言語合成ツール及びそれを利用した集積回路の設計方法を提供する。
【解決手段】 マイクロプロセッサのプログラムメモリとプログラムコードなどを除くハードウエアコンポーネントを、ハードウエア記述言語で記述したハードウエアファイルと、高級レベル言語プログラムをコンパイルして得られたアセンブリレベル言語プログラムを解析して、その命令コードをハードウエアコンポーネントに対応させてハードエウア記述言語で記述したソフトウエアファイルに変換するアセンブリレベル合成プログラムとを有するハードウエア記述言語合成ツールである。そして、このツールは、ハードウエアファイルとソフトウエアファイルとを、ハードウエア設計ファイルとして出力する。
(もっと読む)
ピッチングマシンおよびその変化球制御方法
【課題】 球速、球種、的内の位置の3つを制御し得る新しい知的ピッチングマシンおよびその変化球制御方法を提供することを目的とする。
【解決手段】 3個のローラ1〜3が作るボール挿入空間5と、該ボール挿入空間5内に挿入されたボール4に初速および回転を付与する前記3個のローラ1〜3を各別に回転制御する各駆動装置M1〜M3と、これら3個のローラ1〜3および駆動装置M1、M2、M3が搭載された構造台6を有するピッチングマシンPにおいて、前記構造台6を上下および左右に所定角度で揺動可能に駆動する方向制御駆動部M4、M5を設けたことにより、駆動装置M1〜M3に加えて、構造台6を上下および左右に駆動する方向制御駆動部M4、M5を設けたことで、簡素な構造改変のみにて、希望する速度、希望する球種の球を、バッティングゾーンあるいは的における位置への希望する目標範囲で正確に投球できる。
(もっと読む)
Psf1遺伝子欠損動物およびその利用方法
【課題】 Psf1の個体レベルでの機能を解明し、Psf1が関与する種々の病態を解明するとともに、Psfを利用した新たな研究ツールを提供すること。
【解決手段】 染色体上のPsf1遺伝子の機能が欠損している非ヒト哺乳動物、該動物の骨髄抑制疾患モデル動物としての使用、並びに該動物を利用した造血幹細胞の調製および薬剤スクリーニング方法。
(もっと読む)
271 - 280 / 282
[ Back to top ]