
国立大学法人横浜国立大学により出願された特許
171 - 180 / 429
地中レーダ
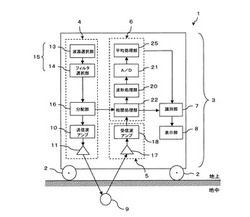
【課題】地中の掘削作業に先立って埋設状況を調査する際に、埋設物の位置を探知するだけでなく、地中の埋設物が金属物体か非金属物体かを識別可能とする地中レーダ。
【解決手段】地中に向けて電磁波を送出する電磁波送信部4と、送出された該電磁波に基づいて反射された電磁波を受信する電磁波受信部5とを有し、該電磁波受信部5によって受信された電磁波に基づき地中に埋設された埋設物9を探知する地中レーダ1において、前記電磁波受信部5で受信された電磁波の受信波形19と前記電磁波送信部4から送出される電磁波の送信波形12との相互相関処理、及び該受信波形19の自己相関処理を行う相関処理部22と、前記相関処理部22により得られる相互相関値と自己相関値との比率を算出し、算出した該比率に基づいて前記地中に埋設された埋設物9が金属物体であるか非金属物体であるかを識別する識別部7とを備えた構成とした。
(もっと読む)
医療用吸着剤

【課題】血液内有害物質吸着能が高い吸着剤を提供する。
【解決手段】カーボンナノチューブを有効成分とする血液内有害物質除去用吸着剤、吸着剤を含む血液浄化用カラム、及び、カラムを備える医療機器。特に、カーボンナノチューブが、マルチウォール構造を有するカーボンナノチューブ及び/又は、バンドル型カーボンナノチューブである血液内有害物質除去用吸着剤等。
(もっと読む)
酸化物触媒粒子の担持方法
【課題】本発明は、酸化物触媒粒子の無機質多孔体への新しい担持方法に係り、従来のバインダーの範疇にはない分散剤を用いた触媒粒子の担持方法を提供する。
【解決手段】本発明の酸化物触媒粒子の担持方法は、ニトロセルロースを含有する分散媒に酸化物触媒粒子を懸濁させてなる分散液を、浸漬法又は吹き付け法により支持体上に塗布した後、乾燥・熱処理して分散媒並びにニトロセルロースを除去するとともに、前記酸化物触媒粒子を支持体上に担持させることを特徴とする。
(もっと読む)
光学遅延素子および光パルス計測装置
【課題】媒質の群速度分散の影響を受けにくく、チャープの影響を受けにくい光学遅延素子を提供し、また、チャープの影響を受け難く広帯域の光パルス計測を行うことができる光計測装置を提供する。
【解決手段】光学遅延素子10Aは、透過型の光学遅延素子に代えて反射型の光学遅延素子とし、光学的な遅延を反射距離によって遅延時間を形成し、この反射距離を異ならせることによって遅延時間に時間差を付与するものである。反射型の光学遅延素子によれば、光学素子を光が通過することによる吸収や分散の影響を除くことができるため、媒質の群速度分散による光パルスの時間広がり(チャープ)を無くすことができ、また、広帯域の周波数(波長)に対して光学遅延時間を付与する。
(もっと読む)
表面欠陥材の疲労限度向上方法
【課題】過大応力の設計値を、表面欠陥のサイズに応じた効率的な設計値として与えることにより、所望の疲労限度を部材に効率よく付与することができる表面欠陥材の疲労限度向上方法を提供する。
【解決手段】 セッチングによる過大応力負荷後、繰返し応力を部材に負荷した場合、亀裂12が成長して亀裂面13が形成されたとしても、亀裂面13は圧縮残留応力場22に停留する。過大応力負荷後の下限界応力拡大係数範囲ΔKth,ovは、圧縮残留応力場22による応力拡大係数KRが材料固有の下限界応力拡大係数範囲ΔKthに加わった値とし、部材に生じる応力の応力比Rを考慮すると、過大応力負荷後の下限界応力拡大係数範囲ΔKth,ovの関係式が得られる。その関係式と過大応力負荷時の応力拡大係数Kovとの関係式を利用することにより、セッチングで負荷する過大応力を効率的な設計値として与える。
(もっと読む)
コイル−ワイヤ分離型電気パルス発生装置
【課題】 大バルクハウゼンジャンプを利用したコイル−ワイヤ分離型電気パルス発生装置において、回転軸の太さ、長さによって、使用する永久磁石の大きさに制限がかからないようにし、永久磁石と複合磁性ワイヤの距離に自由度を持たせることができるようにすることを課題とする。
【解決手段】 大バルクハウゼンジャンプ起こしうる複合磁性ワイヤを配置し、前記複合磁性ワイヤに対し交番磁界を与える永久磁石等の交番磁界発生手段を少なくとも1つ以上配置し、さらに前記交番磁界発生手段が与えた交番磁界によって前記複合磁性ワイヤに誘起された大バルクハウゼンジャンプにおける磁界変化の影響から電気パルスを発生させるコイルを複合磁性ワイヤ外部に設置することを特徴とする。
(もっと読む)
超音波加工用工具
【課題】超音波加工で、被加工物に微細溝あるいは微細な窪み形状を、高能率で安価に加工することができ、しかも凹形加工部の加工精度を維持しつつ工具寿命の延長を可能にする超音波加工用工具の提供。
【解決手段】強度及び剛性が互いに異なるように形成された硬質部1a及び軟質部1bが一定断面形状で延在されてなり、延在方向片端が前記超音波ホーン2に固定される固定端とされている超音波加工用工具1を提供する。
(もっと読む)
平面充填用の図形ピースおよびその図形ピース組、図形ピース組が適用された平面充填体
【課題】単一の図形を組み合わせ並べる行為を通じ、平面を充填する面白さや不思議さが体験できる図形ピースを提供する。
【解決手段】正三角形ET内の図形ピース10で鳥を模した図形からなり、頂点Aに嘴11の先端を、頂点Bに尾羽13の後端縁の上端13aを配置し、嘴11の先端から翼12の先端に至る第1曲線L1と、嘴11の先端から尾羽13の後端縁の下端13bに至る第2曲線L2とを頂点Aを中心として60゜回転対称とした同一の曲線とし、翼12の先端から腰17に至る翼後縁12bの第3曲線L3に、翼後縁12bと第2頂点Bと第3頂点C間の辺との交点Dを中心として180゜回転対称の小曲線L3a,L3bを含ませ、腰17から尾羽13の後端縁の上端13aに至る第4曲線L4と、尾羽13の後端縁の第5曲線L5とを頂点Bを中心として120゜回転対称の同一の曲線とし、正三角形ETの面積と図形ピース10の面積とを同一面積とする。
(もっと読む)
自動車の車両姿勢制御装置及び制御方法
【課題】タイヤに発生するタイヤ横力を直接検出し、当該タイヤ横力情報を用いて、指令値の追従性能を向上させるための自動車の車両姿勢制御装置及び制御方法を提供すること。
【解決手段】本発明に係る車両姿勢制御装置は、自動車の前後輪に装着された2つのタイヤ横力センサ内蔵ハブユニットであって、そのハブユニットの軸受に作用する荷重から前後輪のタイヤ横力を検出する2つのタイヤ横力センサ内蔵ハブユニットと、2つのタイヤ横力センサ内蔵ハブユニットから検出された前後輪のタイヤ横力、自動車の車両重心から前後輪軸の距離、及び自動車の左右の駆動力差を用いたヨーモーメント間の所定の関係式を用いてヨーレートを制御するヨーレート制御手段とを備える。
(もっと読む)
無人車両の走行経路生成方法
【課題】車両走行可能な最低の制約条件を満たしつつ、更に、タイヤや車体への負荷を小さく抑えたり、走行に要する所要時間を短くしたり、低燃費で走行させたりすることができる最適な走行経路を生成することによって、走行に伴うコストを最小に抑える。
【解決手段】無人車両の車幅、最小旋回半径を含む車両拘束条件を入力するとともに、無人車両が走行すべき走行経路生成範囲、回避すべき障害物、入口点および出口点の位置と方向を含む幾何学的拘束条件を入力する(ステップ201)。車両拘束条件および幾何学的拘束条件を満足し、かつ走行経路の曲率あるいはステアリング角または/および走行経路の曲率の変化率あるいは無人車両のステアリング操作量を少なくともコスト要素とするコスト関数の関数値が最小になるように、走行経路を生成する(ステップ202)。
(もっと読む)
171 - 180 / 429
[ Back to top ]