
Fターム[2B041EA23]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | PTO装置 (125) | PTO装置の駆動及び切替機構 (21) | PTOクラッチ (17)
Fターム[2B041EA23]に分類される特許
1 - 17 / 17
トラクタ
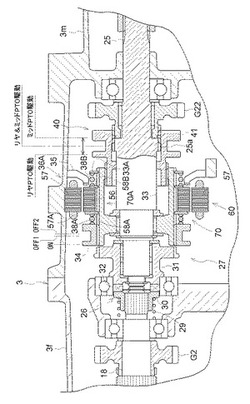
【課題】クラッチ装置を切り操作した時点で作業装置及びPTO軸が保有する回転エネルギーを電力などの形に変換することで再利用することが可能なトラクタを提供する。
【解決手段】作業装置を連結可能なPTO軸25と、原動機によって駆動される入力軸18,31からPTO軸25への入力を入り切り操作するクラッチ装置27とを設け、PTO軸25の外周に外嵌配置された回転子56と、回転子56と径方向で対向可能な固定子57とからなる発電装置60を設け、クラッチ装置27による切り操作に基づいて回転子56と固定子57とが互いに対向して相対回転する発電状態とし、クラッチ装置27による入り操作に基づいて発電状態を解除する回生制御手段70を設けた。
(もっと読む)
農作業機

【課題】トラクタに装着して農作業を行う農作業機であって、アクチュエータの作動により途中に介在するクラッチ等の破損を防止する農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、トラクタ1からの動力を入力軸51を介して伝達し中間にクラッチ82、83を設けた伝動部で伝達して農作業を行い、クラッチ82、83を介して接続されている農作業機の一部をアクチュエータ22により動かすことが可能な農作業機において、クラッチ82、83より動力源側の伝動部の回転を検知するセンサ24と、アクチュエータ22を操作するための操作部15と、制御部21とを有し、制御部21は、操作部15からアクチュエータ22を作動させる操作信号を受信し、かつ、センサ24が回転を検知していない場合、アクチュエータ22を作動させる。
(もっと読む)
農走行作業機の伝動装置
【課題】 走行停止状態のときは、この走行停止状態のときにおいて作業装置が連動されることが必要であるときのみ、PTO軸を駆動し、走行停止状態において作業装置の連動駆動を要しないときは、PTO軸を駆動しない形態とする。
【解決手段】 土壌面を滑走均平するフロート1を有し、マット苗を収容して左、右方向へ往復移動しながら苗分離口2へ苗を繰出す苗タンク4と、この苗分離口2に作用して分離保持する苗を前記フロート1で均平される土壌面に植付ける苗植爪5と等からなる苗植装置6を、車体7のヒッチ8部に装着してPTO軸9で連動し、この苗植装置6に代えて別種の作業装置を装着可能に構成し、この作業装置の種別を判別する作業判別センサを設け、この作業判別センサによる検出によって車体7の走行停止状態における前記PTO軸9を駆動し、又は停止状態に牽制する。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
作業車両
【課題】走行機体に作業機を連結すると共に、作業機をPTO軸を介して駆動する農業用トラクタ等の作業車両において、前記PTO軸の回転数を変更するPTO変速装置を入れ忘れた状態で作業走行を行なってしまうことを未然に防止する。
【解決手段】PTO軸21への動力伝達を入切するPTOクラッチ17が入り状態にあり、また作業機5が作業位置に下降しているにも拘らずPTO軸21が回転しないことを検出した場合、PTO変速装置19の入れ忘れと判断してこれを報知するように構成した。
(もっと読む)
作業機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる作業機を提供することを課題とする。
【解決手段】作業機10は、エンジン12の動力を断接するクラッチ24を備え、このクラッチ24にクラッチ24の断接状態を検出するクラッチスイッチ52を備え、アタッチメント部19に、作業部を作業位置(OP)と、この作業位置(OP)より高い待機位置(WP)とに調整することができる作業部位置調整機構41を備え、クラッチ24が接続されているとのクラッチスイッチ52の情報を受け、且つ、作業部が作業位置(OP)にあるという作業位置検出スイッチ75の情報を受けたときにエンジン12の回転速度を高速になるように制御部94を備える。
(もっと読む)
作業機
【課題】本発明は、駐車ブレーキが制動状態にあるとき、誤って機体を走行させ、駐車ブレーキが磨耗するという問題を解消するとともに、駐車ブレーキレバーとクラッチレバーの配置自由度を高めることができる作業機を提供することを課題とする。
【解決手段】作業機としての耕耘機10は、エンジンの動力を断接するクラッチ51を備え、このクラッチ51にクラッチ51の断接状態を検出するクラッチスイッチ52を備え、機体11に、駐車ブレーキ機構30および駐車ブレーキスイッチ49を備え、クラッチ51が接続されているとのクラッチスイッチ52の情報を受け、駐車ブレーキ機構30が非制動状態にあるという駐車ブレーキスイッチ49の情報を受けたときにエンジン12の回転速度を高速に制御する制御部84を備える。
(もっと読む)
耕耘機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、機体11にエンジン12を備え、このエンジン12から耕耘爪14に駆動力を断接するクラッチ22を備え、機体11に機体11の傾き角度を検出する傾斜角検出センサ20を備え、クラッチ22が接続されているとのクラッチスイッチ の情報を受け、機体11の傾き角度が水平面に対して所定角度範囲内にあるという傾斜角検出センサ20の情報を受けたときにエンジン12の回転速度を高速になるように制御する制御部57を備えている。
(もっと読む)
耕耘機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、エンジンの動力を断接するクラッチ22を備え、このクラッチ22にクラッチ22の断接状態を検出するクラッチスイッチ23を備え、機体11に、操作ハンドル16を通常の操作高さと低位高さとに調整することができるハンドル高さ調整機構を備え、クラッチ22が接続されているとのクラッチスイッチ23の情報を受け、且つ、操作ハンドル16の高さが通常の操作高さにあるという低位検出スイッチ57の情報を受けたときにエンジン12の回転速度を高速に制御する制御部84を備える。
(もっと読む)
乗用芝刈機
【課題】モーア上昇時に確実にモーアの駆動を停止させることができるフロントモーアを備えた乗用芝刈機を提供すること。
【解決手段】モーア6にエンジン動力を伝達するモーア駆動用クラッチ30aと基部側に設けた回動支点61aの近傍に設けたローラ63を有するPTOレバー61を操作してクラッチ30aの切り位置と入り位置にそれぞれ対応した位置に保持するPTOレバー61のローラ63を係止する2つの係止谷部62c、62dをレバーロックカム62に設け、モーア6を上昇させるとレバーロックカム62のクラッチ30aの入り位置に対応した係止谷部62dにあるPTOレバー61のローラ63をクラッチ30aの切り位置に対応した係止谷部62cに移動させるワイヤ66などの連携機構を備えた乗用芝刈機であり、簡単な構成でモーア6を所定量上昇させるとPTOレバー61が動いて動力を遮断し、モーア6の駆動を絶つことができる。
(もっと読む)
牽引車の動力出力軸に自在継手軸を結合する装置
【課題】簡単で信頼できる結合を確実に行い構造が簡単な、牽引車の動力出力軸に自在継手軸を結合する装置。
【解決手段】自在継手軸に回動不能に配置された第1の結合手段48と、牽引車の動力出力軸1上に回動不能に配置されてトルク伝達のため第1の結合手段に回動不能に結合可能な第2の結合手段17とを備える。結合手段を結合させるために第1の結合手段を少なくとも間接的に回動可能に支持すると共にロック手段を有する結合シールド7が配設され、牽引車の後部に取付け可能であると共にロック解除位置とロック位置との間で変位可能な少なくとも一つのロック装置を有するブラケットが配設され、ロック装置をロック解除位置からロック位置へ変位させると共にロック装置にロック手段を相互作用させることで、結合シールドをブラケットに向け引張り、第1の結合手段を所定の結合位置へ移動させて第2の結合手段と結合させる。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、操向操作自在な車輪の操向角度を検出する操向角度検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、操向角度検出手段で検出された車輪の操向角度とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、PTO操作手段を備えた場合、PTO操作手段の作動及び停止状態への人為的な操作、PTOクラッチの伝動及び遮断状態への人為的な操作が、違和感なく行えるように構成する。
【解決手段】 リンク機構6の上昇駆動に伴って、PTOクラッチ29を遮断状態に操作し、リンク機構6の下降駆動に伴って、PTOクラッチ29を伝動状態に操作するPTO操作手段を備える。PTO操作手段が停止状態に操作されてPTOクラッチ29が伝動状態に操作される伝動位置、PTO操作手段が停止状態に操作されてPTOクラッチ29が遮断状態に操作される遮断位置、及び、PTO操作手段が作動状態に操作される自動位置に、PTOスイッチ33を操作自在に構成する。遮断位置を間に挟んで一方側に伝動位置を配置し、他方側に自動位置を配置する。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側に第1PTO切換位置A4を設定し、第1PTO切換位置A4よりも下降側に第2PTO切換位置A5を設定する。昇降レバー12が第1PTO切換位置A4を越えて上昇側に操作されると、PTOクラッチ29を遮断状態に操作し、昇降レバー12が第2PTO切換位置A5を越えて下降側に操作されると、PTOクラッチ29を伝動状態に操作する。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。
(もっと読む)
始動安全装置
【課題】クラッチ操作部材に対する操作に連動して、遮閉部材がクランキング軸の係合端部を自動的に遮閉又は開放し得る構造簡単な始動安全装置及び前記遮閉部材に対する操作によっては前記クラッチ操作部材は連動しないように構成する始動安全装置を提供する。
【解決手段】始動安全装置100,100’は、遮閉部材110と、第1付勢部材120と、連結部材130,140,150とを備え、クラッチ操作部材230,230’がクラッチ遮断位置に位置されている際には前記遮閉部材が前記第1付勢部材の付勢力によって開放位置に保持され、且つ、前記クラッチ操作部材がクラッチ遮断位置からクラッチ係合位置へ人為操作される際には該クラッチ操作部材に付加される人為操作力によって前記遮閉部材が前記第1付勢部材の付勢力に抗して前記開放位置から遮閉位置へ揺動するように構成されている。
(もっと読む)
1 - 17 / 17
[ Back to top ]