
Fターム[2B043DB05]の内容
農業機械一般(操向) (6,001) | 操舵装置の構成、配置又は取付け (462) | クラッチ (80)
Fターム[2B043DB05]に分類される特許
21 - 40 / 80
苗移植機
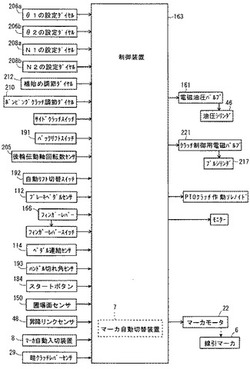
【課題】マーカ自動入切装置8を非作動状態にしたとき、旋回頻度が高い圃場などで作業中に圃場を荒らさないようにした苗移植機を提供すること。
【解決手段】車体2の旋回に連動して作用状態となる線引きマーカ6を左右何れかに自動的に切り替えるマーカ自動切替装置7と該マーカ自動切替装置7を作動状態と非作動状態とに切り替えるマーカ自動入切装置8とハンドル34の操向操作に連動して操向内側の後輪11の駆動を断続的に入り切りする断続的入り切り制御機能B1とを備え、該断続的入り切り制御機能B1は、マーカ自動入切装置8を非作動状態に切り替えたとき、操向内側の後輪11の駆動を入/切する周期の入状態の割合を通常の旋回時に予め設定している操向内側の後輪11の駆動を入/切する周期の入状態の割合より大きくする構成とした。
(もっと読む)
作業車

【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
作業車の旋回制御装置
【課題】摩擦式油圧クラッチを兼用することにより走行駆動手段の構成の簡素化を図り、併せて、適切にブレーキ旋回状態を現出させることが可能となる作業車の旋回制御装置を提供する。
【解決手段】走行駆動手段が逆転クラッチの操作圧を変更することにより、ブレーキ旋回状態と逆転旋回状態とに切り換え自在に構成され、前記逆転旋回状態が指令されると、摩擦式油圧クラッチの操作圧を逆転旋回用操作圧にし且つブレーキ旋回状態が指令されるとブレーキ旋回用操作圧に調整するブレーキ旋回用処理を実行し、且つ、ブレーキ旋回状態の指令に切り換えられた直後においては、予め設定された初期操作圧を目標操作圧として設定し、その後は、ブレーキ旋回状態であると判別されるまで、初期操作圧から圧力を変更させた補正操作圧を目標操作圧として設定して、摩擦式油圧クラッチの操作圧を調整する。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
コンバインの操縦装置
【課題】構成の簡易化により、生産コストを改善することができるコンバインの操縦装置を提供する。
【解決手段】コンバインの操縦装置は、操縦席の前部に配置した左右の傾動操作が可能な操舵レバー3と、この操舵レバー3と一体構成でその操作力を昇圧スプール軸14に受けるリリーフバルブ4とを備え、このリリーフバルブ4によって油圧制御されるサイドクラッチ機構を介して左右の走行動力を断接制御可能に構成され、上記操舵レバー3の下方のフロア5には、踏込み操作が可能な掻込ペダル6を設け、この掻込ペダル6の踏込力を伝えるケーブル7を上記昇圧スプール軸14と連結して上記サイドクラッチ機構により左右の走行動力を同時に断接制御可能に構成したものである。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
移植機
【課題】サイドクラッチ連動機構を備えるものにおいて、旋回中の機体走行停止操作時に、対地制動力が弱くなったり、制動力の左右バランスが崩れて機体に左右ぶれが発生する不都合を解消する。
【解決手段】ステアリング機構28の操舵角が所定角度を超えたことに連動して旋回内側のサイドクラッチ23L、23Rを自動的に切るサイドクラッチ連動機構29と、クラッチ・ブレーキペダル47の操作に応じて、走行動力伝動経路に介設されるメインクラッチ9を切り、かつ、走行動力伝動経路に介設される単一のブレーキ20を作動させて機体走行を停止させる機体走行停止操作機構48とを備える乗用田植機1であって、クラッチ・ブレーキペダル47が操作されたとき、ステアリング機構28とサイドクラッチ23L、23Rとの連動を阻止するサイドクラッチ連動阻止機構51を設ける。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
走行車両
【課題】多条植えの乗用型作業機が、たとえ湿田走行中であっても、前進の場合は所望の走行経路で旋回が可能となるとともに、後進の場合については、安定して後進旋回することができる走行車両を提供する。
【解決手段】走行車両は、走行車体(2)と、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回連動機構(A)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回連動機構(A)により断続的に入/切する周期を変更する制御装置(163)を備えて構成され、上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を連続的に入として制御するものである。
(もっと読む)
作業車の制御装置
【課題】圃場の状況や作業の内容に合わせて、精度よく車体の状態を作業状態から非作業状態に切り換えることができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、操縦ハンドル6の操舵速度がしきい値以上で、且つ、前輪2の切れ角が所定角度以上であると、車体1の状態を作業状態から非作業状態に切り換える車体状態切換手段51,53を備えて、車速検出手段63により検出した車速が速くなる程、しきい値Kを高く設定してある。
(もっと読む)
作業車の制御装置
【課題】前輪増速手段又は自動上昇手段を適切なタイミングで作動させることができ、位置合わせ走行の作業性を向上できる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、前輪2を後輪3の周速度よりも速く増速駆動させる前輪増速手段51を備え、前輪2の切れ角が所定増速角度β1以上であると前輪増速手段51が作動するように構成し、車体1の作業走行経路に対する位置合わせ走行を推測する推測手段54を備え、推測手段54により位置合わせ走行が推測されると、前輪増速手段51が作動しないように構成してある。
(もっと読む)
走行車両
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】旋回外側の後輪11の回転数センサ205aと旋回内側の後輪11の回転数センサ205bを用いて車体2の旋回時において、旋回内側の後輪11の駆動力を旋回連動機構Aにより断続的に入/切する周期を、旋回外側の後輪の回転数センサ205aにより検出される回転数(a1)に応じて変更する制御装置163を備えているので、たとえ湿田走行中であっても、所望の走行経路で旋回が可能となる。
(もっと読む)
圃場作業車両
【課題】圃場における機体旋回の際に、旋回内側の前輪と隣接植付条との干渉を小さく抑えつつ、機体を容易に転向することができる圃場作業車両を提供する。
【解決手段】圃場作業車両は、左右の支持輪(3)および左右のサイドクラッチを介設して旋回駆動可能な左右の駆動輪(2)によって走行可能に支持された機体(4)に圃場作業装置(6)を搭載して構成され、上記左右の支持輪(3)には、それぞれの支持高さ位置を変更する支持調節部(3a)を設け、この支持調節部(3a)により左右のサイドクラッチの一方の遮断動作に応じて同じ側の支持輪(3)を他側に対して高く支持するクラッチ連動手段(18)を設けたものである。
(もっと読む)
走行車両
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供すること。
【解決手段】走行車体2の操縦席に設けた操向方向を決めるハンドル34の操作に連動して進行方向に向かって左右に設けられた前後輪10,11の向きを変更できるステアリング機構(175,180など)と、該ステアリング機構(175,180など)に連動して旋回内側の後輪11の駆動力を断つか制動するクラッチ操作アーム86I,ブレーキ操作アーム86Jなどの旋回連動機構Aを備え、旋回時に旋回内側の後輪11の駆動力を旋回連動機構Aにより断続的に断つか制動するする周期を車速が遅ければ遅いほど短く、車速が速ければ速いほど長くする走行車両である。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置と,動力を逆回転伝達する旋回走行用変速装置とを備えた走行車両において,直進及び旋回走行の操作性を小型の機構にて向上する。
【解決手段】前記旋回用操作具にて回転する旋回入力軸72を内蔵するステアリングボックス20内に,前記旋回入力軸にて回転する変速制御体81と旋回制御体82とを,変速制御体が前記旋回入力軸に直交する変速軸線Xの回りに回転自在し,旋回制御体が前記旋回入力軸の軸線及び前記変速軸線Xに直交する旋回軸線Yの回りに回転自在に設け,これらの両方を,前記変速用操作具に連動する主変速レバー入力軸85を介してその軸線回りに傾き回転し,前記変速制御体の傾き回転にて変速出力軸86を介して直進走行用変速装置を変速作動し,前記旋回制御体の前記旋回入力軸による回転にて旋回出力軸104を介して旋回走行用変速装置を変速作動する。
(もっと読む)
走行車両
【課題】エンジンの動力を、直進用及び旋回用HST式無段変速機構25,28並びに差動機構を介して左右の走行クローラに伝達するように構成する一方、主変速レバー73と回動操作式の操向ハンドル10とを備えている走行車両において、走行機体1が前後進のいずれの状態であっても、操向ハンドル10の回動操作方向と走行機体1の旋回方向とを一致させるようにする。
【解決手段】操向ハンドル10から旋回用HST式無段変速機構28への操作力伝達経路に、主変速レバー73の操作状態に応じて、操向ハンドル10からの操作力を正逆回転及び中立の3段階に切換可能な操作力切換機構100を配置する。
(もっと読む)
乗用型作業機
【課題】クローラ操向方式の乗用型農作業機において、走行機体の旋回に際して左右のクローラを同じ方向に周回させるノーマルモードと逆方向に周回させるスピンターンモードとの切り替えを行う構成を簡素化する。
【手段】操縦ケース24の内部に筒状の変速出力軸115が回転可能に配置されている。変速出力軸115の内部にはクラッチ軸149がスライド自在に嵌め込まれており、変速出力軸115の外側には、ノーマルモード用の減速出力軸とスピンターンモード用の直結出力軸とが相対回転可能に嵌まっている。クラッチ軸149には、変速出力軸115の窓穴155の箇所に位置する2条の環状凹所156,157が形成されており、変速出力軸115には、環状凹所156,157に嵌脱するストッパー部160を有する板ばね158が固定されている。
(もっと読む)
コンバイン
【課題】操向操作具の操作性の向上によってコンバインの作業能率を高める。
【解決手段】クローラを駆動するミッションケース32L,32R内に差動機構を設け、該ミッションケース32L,32Rに走行用油圧無段変速機構5と旋回用油圧無段変速機構6を取り付け、該走行用油圧無段変速機構5と旋回用油圧無段変速機構6による差動機構の駆動によって旋回内側の車軸18を正逆に無段変速して駆動する構成とし、前記旋回用油圧無段変速機構6の駆動回転速度を操向操作具の回動操作角度に応じて調節する構成とし、該操向操作具の前後方向の傾斜姿勢を調節可能に構成し、該操向操作具の掴み部に刈取部を昇降操作するスイッチを設ける。
(もっと読む)
走行車両
【課題】クラッチペダルの踏み込みなどのクラッチ操作手段の操作量に連動して変速装置の入り切りをする油圧クラッチがクラッチ操作手段の操作フィーリングに影響を与えることがないようにした油圧制御装置を有する作業車両を提供すること。
【解決手段】複数の油圧クラッチ(D、・・・)の各油圧クラッチ毎にエンジン出力軸1から該当する油圧クラッチのクラッチ軸までの減速比と該油圧クラッチの回転数をエンジン出力軸1の回転数センサ122の検出値に基づき推測し、油圧クラッチ毎に該油圧クラッチの回転により発生する遠心力の影響によるクラッチピストンの推力を補正し、該補正値に基づき油圧クラッチ毎の作動油の油圧圧力を補正して油圧クラッチ毎の非接続状態から接続状態までの前記油圧圧力を変更する油圧制御装置100を備えた走行車両である。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
21 - 40 / 80
[ Back to top ]