
Fターム[2B043EB15]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの構成 (119) | 磁気センサ (11)
Fターム[2B043EB15]に分類される特許
1 - 11 / 11
作業車両
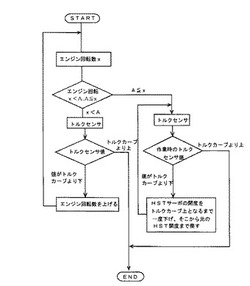
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
自律走行作業車の制御装置

【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
薬剤散布用管理作業車両
【課題】単位面積当たり所定量の薬液散布による適正な薬剤散布のために、高精度の散布速度を安定して取得することができる薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、散布車速を連動基準として散布量制御する制御部Cにより単位面積当たり所定量の薬液量で薬剤散布を行う車速連動散布装置Dとを備えて構成され、上記前輪3及び後輪4の駆動動作を検出する駆動センサS1とGPS電波を受けて機体位置を検出するGPSセンサS2とを設け、このGPSセンサS2によって得られた機体の移動速度を散布車速として車速連動散布装置Dを散布量制御するとともに、駆動センサS1によって得られる機体の駆動速度について上記移動速度との差から算出される前輪3及び後輪4のスリップ率を取出し可能に保持する格納部C1を備えたものである。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
可変散布装置
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
等高線に基づいて作成された農作業用作業線に沿って走行位置を明示する表示装置及び農作業方法
【課題】従来、圃場の耕耘は区画の一辺に添うように耕耘した、合理的な方法が主であった。しかし降雨時に水流が発生すると、土壌流失になり、表土を流亡させる原因となっていた。土壌流失を防ぐには等高線耕耘が最も良い方法であり、目視で同一標高作業できることを提供する。
【解決手段】あらかじめ作成しておいた圃場の高低マップデーターをもとにして、等高線をできるだけ直線に近い線として演算し、諸条件を考慮の上表示部に少なくとも現在位置と線と区画を表示して、表示部の線に添って作業することによって、等高線耕耘になるようにし、土壌流失を防止するようにした。
(もっと読む)
ソーラー芝刈り機
【課題】太陽電池を用いて、自動芝刈り機構における走行制御手段をコストの低いものとする。
【解決手段】減速装置4を取付けた走行モータ1を車台7に設けてなる走行機構に、刈刃と刈刃駆動モータ3と減速装置6からなる刈刃駆動機構を取り付け、磁気識別センサ11,12を当該車台前端部左右それぞれに設け、当該走行モータ端子の両端それぞれにリレーの接点を接続し、当該リレーのコイル端子と当該磁気識別センサの出力端子を接続し、当該走行モータと当該リレーを介して接続する当該磁気識別センサは当該車台左右反対位置に配置し、太陽電池を当該車台に取付け、当該リレーや当該磁気識別センサからなる走行制御機構と当該走行機構と当該刈刃駆動機構を当該太陽電池に接続し、当該走行機構と当該刈刃駆動機構並びに当該走行制御機構と当該太陽電池13を備える。当該車台を磁気を帯びたもので囲われた場所に配置する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 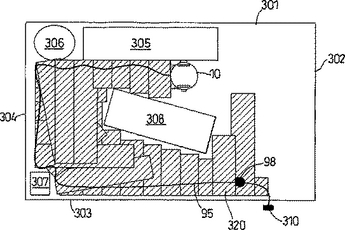 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]