
Fターム[2B062AA11]の内容
移植機(田植機の要素) (4,646) | 目的、機能 (1,144) | 移植機等の性能向上 (1,000) | 制御 (111)
Fターム[2B062AA11]の下位に属するFターム
演算処理 (54)
Fターム[2B062AA11]に分類される特許
41 - 57 / 57
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
移植機

【課題】表面から植付け深さまでの圃場表層の整地作業を行う整地ロータが、非駆動状態で圃場に対して接地しない移植機を提供することを課題としている。
【解決手段】走行機体1に昇降自在に連結された植付作業機7に、植付作業機7が下降した植付作業時に圃場に接地し、上記整地作業が可能となる作業姿勢と、植付作業時に圃場から離反し、上記整地作業が不可能となる収納姿勢とに姿勢切換可能に取り付けられた整地ロータ22の非駆動状態での圃場に対する接地を規制するべく、植付作業機7の下降状態時に、整地ロータ22が駆動切り状態で、作業姿勢に位置すると、植付作業機7を上昇させる整地ロータ接地規制手段を設けた。
(もっと読む)
農用作業車の制御装置
【課題】田植機において畔際での苗植付部の自動旋回制御を安定させる。
【解決手段】旋回走行しうる田植機(1)に対して昇降可能な苗植付部(7)を設け、田植機(1)には苗植付部(7)の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備え、田植機(1)の左右両側には外側に突出状態としたり、内側に収納状態とすることのできる予備苗載せ台14を設け、予備苗載せ台14の機体内側への収納状態のときには、自動旋回制御装置の作動を牽制する牽制手段を設ける。
(もっと読む)
水田作業機の指標形成マーカ操作構造
【課題】 次の作業行程における走行基準となる指標を田面に形成する左右一対の指標形成マーカをそれぞれ出退操作可能に備えるとともに、各指標形成マーカの突出作動指令を出すマーカ選択手段を備えた水田作業機のマーカ操作構造において、マーカ選択操作を誤っても速やかに修正操作を行って作業に移行することができるようにする。
【解決手段】 前回のマーカ突出作動方向を記憶する記憶手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向との相違を判断する判断手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向とが同一であることが判断されると作動する報知手段とを備えてある。
(もっと読む)
多目的農業機械
【課題】走行駆動と作業機駆動出力とが可能な本機に、異なる作業機を付替え可能な構成において、作業機の交換に応じて切替えを要求される制御プログラムの誤選択の発生が起こり得る。
【解決手段】走行駆動と作業機駆動出力とが可能な本機2と、この本機2に装着可能で制御対象(昇降制御、左右水平制御、植深さ調整制御)の組合せの異なる作業機3・4・5・6の群と、を備える多目的農業機械1であって、本機2には、前記制御対象の組合せにそれぞれ対応する制御プログラム93・94・96の群が備えられると共に、作業機側コネクタ100と本機側コネクタ27との連結により形成される識別回路110と、この識別回路110による検出に応じて、その制御対象の組合せに対応する制御プログラムの動作を許可する選択用判定回路28と、が備えられる。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
作業機
【課題】 苗の植付をする田植え機等の作業機において、作業装置を圃場に接地させ、油圧の感度を鈍感側から設定値に戻す際に、作業装置のハンチングを誘発することなく、しかもフロートによる泥押等を発生させないようにした作業機を提供する。
【解決手段】 作業装置を下降させ、植付部(検知体)の圃場への接地を検知して油圧バルブの開度を調整して感度調整を行う際に、作業装置の下降開始時には、検知ワイヤに位置を11/11(鈍感側)に設定し、検知体の接地を検出した後、設定された鈍感側の検知感度と作業時の検知感度1/11(敏感側)との中間位置まで1、5秒(1〜2秒)、作業時の検知感度1/11まで3秒(2〜4秒)の時間をかけてゆっくりと変化させ、検知感度の切換によるハンチングの誘発や泥押しを防止する。
(もっと読む)
乗用田植機のエンジン制御構造
【課題】 乗用田植機の燃費の向上と騒音低減を図る。
【解決手段】 走行用の変速操作具が走行停止状態をもたらす特定位置に操作されていることの条件と、作業対象に設定された条件、例えば、苗残量が少なくなった状態にあるとか、あるいは、苗植付け装置が上限位置まで上昇している状態にある、等の条件が満たされるとエンジンを停止させるエンジン自動停止手段を備えてある。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
農作業機のエンジン制御構造
【課題】 農作業機における燃費の向上と騒音低減を図る。
【解決手段】 走行用の変速操作具42が走行停止状態をもたらす特定位置ESにあることを検知する検知手段と、この検知に基づいてエンジン12を停止させるエンジン自動停止手段とを備えてある。
(もっと読む)
水田作業機
【課題】線引きマーカが圃場表面などの障害物に接触しているような場合に水田作業機の構成部品が損傷しないようにすること。
【解決手段】植付部4を含む作業部を走行車体15に設け、さらに走行車体15の前進と共に次行程での走行車体15が通る表土面上に線引きするための線引きマーカ53を走行車体15の進行方向に向かって左右に突出させる線引き位置と線引きさせない収納位置に移動自在に設け、マーカ53が線引き状態で作動しているにもかかわらず線引き状態にならないことをマーカセンサ129a,129bが検出すると、線引きする側の作業部の一部の作動を停止させるべく連動する連動装置を設ける。
(もっと読む)
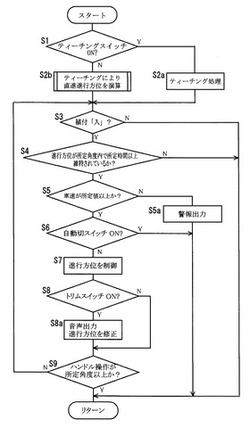
自動植付作業車用制御装置
【課題】三角形等の変形圃場を往復作業走行する場合に、機体旋回後の農作業装置の植付稼動を可能な範囲で旋回動作と連動して自動処理することができる自動植付作業車用制御装置を提供する。
【解決手段】自動植付作業車用制御装置は、機体の旋回動作の検出によりその旋回開始のタイミングと対応して農作業装置の停止を指令し、旋回動作の終了が判定されると上記農作業装置の稼動を指令する旋回連動制御を行う制御処理部を備えて構成され、この制御処理部は、旋回形態が所定の適用条件に適合するか否かを判定し、適合する場合について旋回連動制御を適用し、また、不適合の場合について別途設定の条件外処理に切替えるように制御する。
(もっと読む)
農作業機の油圧操作構造
【課題】 油圧ポンプからの圧油を最大必要流量の異なる複数の油圧作動装置に直列に供給する場合、最大必要流量の少ない油圧作動装置を、要求される流量の圧油供給によって好適に作動させることができるようにする。
【解決手段】 油圧ポンプ26からの圧油を最大必要流量の異なる複数の油圧作動装置20,4,35に直列に供給するよう構成し、最大必要流量の少ない油圧作動装置4の制御弁27が全開状態で、この油圧作動装置4に供給される最大油量をポンプ吐出流量よりも少ない所定流量に制限する流量制限手段を備えてある。
(もっと読む)
水田作業機
【課題】非線引き状態から線引き状態にする過程で急激に線引きマーカが圃場に降りないだけでなく、旋回終了時に線引きする場合には速やかに線引きマーカを圃場に降ろすことができる水田作業機を提供すること。
【解決手段】走行車体2が通る表土面上に線引きをするための線引きマーカ53、53を走行車体2の前進方向に向かって左右に設け、旋回諸作動に連動して一方の線引きマーカ53を非線引き状態にするとともに、次に線引きする他方の線引きマーカ53を線引き状態にする左右切替を行い、該他方の線引きマーカ53が旋回終了で線引き状態となる前に、中途位置まで移動して停止し、その後旋回終了判断により線引き状態になるまですみやかに移動できる構成を備えている。
(もっと読む)
作業機
【課題】 昇降装置により走行車体に対して昇降可能に設けた苗植付部を設け、前記昇降装置を操作して前記苗植付部の昇降操作が行える昇降操作具を設けた田植機において、機体の周辺に他の干渉物がある状態や人がいる状態で作業者が誤って昇降操作具を操作すると、作業部が昇降することにより、前記干渉物に衝突して破損したり、前記人に衝突したりして危険である。
【解決手段】 上昇スイッチ又は下降スイッチの操作による苗植付部の昇降途中で該苗植付部が他の干渉物や人に衝突して昇降が停滞していることを昇降リンクセンサにより検出すると、逆方向へ苗植付部を昇降させた後、苗植付部の昇降作動を停止させる。
(もっと読む)
乗用型作業機
【課題】従来、前輪の直進状態から所定角以上の操向によって左右後輪の旋回内側のもののサイドクラッチを切って制動する旋回連繋機構を設けた乗用型田植機があるが、操縦者は旋回に適した車速となるように、アクセル操作若しくは変速操作しなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6・6と左右後輪7・7・を有する乗用型走行車両において、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・I若しくは左右後輪7・7を各別に制動する左右サイドブレーキJ・Jを設けて、左右前輪6・6の所定角度以上の操向操作に連動して、左右前輪6・6の操向方向側の後輪7のサイドクラッチIを切るかサイドブレーキJをかける連携手段を設けると共に、機体旋回位置を判断する手段を設けて機体旋回時に車速を減速する手段を設けた乗用型走行車両。
(もっと読む)
水田作業機の昇降制御装置
【課題】 接地センサと昇降制御用の制御バルブとをワイヤ連係するに、接地センサに連結されたセンサリンクの内部でセンサワイヤのインナワイヤが大きく弛んだ場合でも、インナワイヤがこじれたり引っ掛ったりするのを防止して接地センサの変位を円滑に伝達することができるようにする。
【解決手段】 センサリンク48に所定間隔をもって対向するよう一対の縦壁部48aを形成して、これら縦壁部48aのそれぞれに長孔49を形成し、両長孔49に亘って支持ピン51を挿通するとともに、両長孔49の間において支持ピン51に回動可能に遊嵌したワイヤ連結部材52にインナワイヤ53bの端部を連結し、ワイヤ連結部材52の両側面から突設した回動規制突起70を対向する長孔49にそれぞれ挿通してある。
(もっと読む)
41 - 57 / 57
[ Back to top ]