
Fターム[2B062AA11]の内容
移植機(田植機の要素) (4,646) | 目的、機能 (1,144) | 移植機等の性能向上 (1,000) | 制御 (111)
Fターム[2B062AA11]の下位に属するFターム
演算処理 (54)
Fターム[2B062AA11]に分類される特許
21 - 40 / 57
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
移植機

【課題】線引きマーカの収納忘れを防止した移植機を提供する。
【解決手段】機体左側の線引きマーカは、作業機操作レバーが後方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わり(ステップS44〜S47)、機体右側の線引きマーカは、作業機操作レバーが前方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わる(ステップS48〜S51)。また、これら左右の線引きマーカは、マーカ自動スイッチが切操作されると、両上げ状態となり、マーカ自動スイッチが入操作されると、両上げ状態まえの姿勢に復帰する(ステップS52〜S54)。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
乗用型田植機
【課題】苗載台上に載置したマット苗の残量低下に伴う苗継ぎや苗補充作業のように、比較的頻繁に行われる作業において、オペレータが操作しなくてもエンジンの回転数をアイドリング状態まで速やかに低下させると共に、自走移動による畦越えや運搬車両の荷台への積み降ろし作業を行なう際、エンジンの回転数が不測に停止することを防止して、オペレータが降車した状態で安全且つ的確な作業が行なえるようにする。
【解決手段】苗切れまたは肥料切れ状態をオペレータに知らしめる警報手段72a,72bが作動可能状態且つ駐車ブレーキが作用中であって、苗残量検出センサ61による苗切れの検出または肥料残量検出センサ62による肥料切れの検出がなされると共に、着座状態検出センサ73による運転座席12へのオペレータの非着座状態が検出された時、エンジンEの回転数をアイドリング状態まで自動的に低下させるエンジン回転数制御手段81を設けた。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
移植機
【課題】新たな油圧バルブや操作手段を設けることなく植付装置の下降速度を遅くすることを可能とした移植機を提供する。
【解決手段】乗用田植機1は、油圧モードとされた際、植付装置30を昇降駆動する際の通常の速度より遅い速度によって植付装置30を下降させる遅速制御位置48と、油圧シリンダ21の下降を停止させる停止位置49とを設けた油圧感度調節ダイヤル16を備えので、油圧モードに切換えられた際、即ちメンテナンス時等の際にも、新たに操作手段を設けることなく、通常よりも遅い下降速度によって植付装置30を下降させることができる。
(もっと読む)
苗移植機
【課題】本発明の課題は、畔際近くの苗植付作業に際し、1株分の苗を植え付けた後、機体が発進するように構成することにより、操作性の向上並びに作業能率の向上を図る。
【解決手段】本発明は、機体の前後進制御を司る前後進操作手段(24)と苗植付部の昇降制御を司る植付昇降操作手段(28U,28D)を備え、植付昇降操作手段(28U,28D)により苗植付部を苗植付位置まで下げにし、前後進操作手段(24)により機体を前進域に操作すると、苗植付部の駆動により1株分の苗を植え付けた後、機体が発進するよう制御可能に構成する。
(もっと読む)
乗用作業機
【課題】本発明では、旋回後に所定の動作を自動的に行わせる旋回連動自動制御装置を設けた乗用作業機において、旋回走行中に旋回内側の車輪が滑らないで旋回後の諸作業動作の自動制御が正確に働くようにすることが課題である。
【解決手段】乗車機体を支持する前輪と後輪の四輪を弾性支持力の調整可能な前輪サスペンション機構と後輪サスペンション機構3Sで支持すると共に前輪或は後輪の左右に旋回時の内側車軸回転数を検出する伝動軸回転数センサを設け、さらに、該前輪サスペンション機構と後輪サスペンション機構3Sの弾性支持力を制御する制御装置を設け、該制御装置で前記伝動軸回転数センサの検出回転数から算出する旋回角度が所定角度を超えると前記前輪サスペンション機構と後輪サスペンション機構3Sの旋回内側の弾性支持力を外側の弾性支持力に対して相対的に硬くなるように変更すべく制御した乗用作業機の走行安定制御とした。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 左右前輪を所定角度以上に操向操作した状態で後輪の伝動軸回転数を検出し、後輪の伝動軸回転数の検出に基づいて走行距離算出手段にて走行距離を算出し、前記伝動軸回転数が第一の設定値を超えると田植装置を降下させ、その後、前記伝動軸回転数が第二の設定値になると田植装置を駆動させて旋回時の諸作業用の作動を自動的に行わせ、前記伝動軸回転数が第二の設定値になっても田植装置が下降して接地していない場合にモニターに表示する制御装置を設けた。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
苗移植機
【課題】作業管理ができるように実際に行った苗植付面積を知り得る装置を備えた苗移植機を提供すること。
【解決手段】作業モニタ装置33は、後輪回転センサ17の走行速度に基づき走行車体の走行距離を計測する制御装置100の走行距離計測手段100aと該走行距離計測手段100aによる走行距離の計測に基づいて算出される植付面積を算出する植付面積算出手段100bと、に基づきモニタ画面に表示がなされる走行距離表示部33aと走行距離に基づいて算出される苗植付面積を告知する苗植付面積告知部33bを備え、また苗植付部4の一部の植付条のみを非植付状態にする畦クラッチレバー19の作動に基づいて苗植付面積を補正する植付面積補正手段100cを備えているので、苗植付部4の一部の植付条のみを非植付状態にしたことを制御装置100に送信してその結果を苗植付面積告知部33bに表示できる。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を昇降自在に支持し、水田作業装置に対地作業装置を備えた水田作業機において、水田作業装置が設定高さから下降側に変位した場合、対地作業装置が田面の泥を押してしまう状態を少なくする。
【解決手段】 水田作業装置の田面Gからの高さを検出する高さセンサー68と、高さセンサー68の検出値に基づいて水田作業装置を田面Gから設定高さに維持するように昇降駆動する昇降制御手段とを備える。水田作業装置5に対地作業装置53を昇降自在に支持し、対地作業装置53を水田作業装置に対して昇降駆動する昇降機構56を備える。水田作業装置が設定高さから下降側に変位すると、昇降機構56を対地作業装置53の上昇駆動側に作動させる上昇手段を備える。
(もっと読む)
苗移植機
【課題】 従来は、疎植仕様として、37株や42株では車速を上げるほど苗植付具が脈動して植付姿勢が乱れる問題があった。
本発明の課題は、疎植仕様での高速植を可能とし、苗植付具の脈動を防止しながら植付精度の向上を図ることにある。
【解決手段】 本発明は、圃場に苗を植え付ける苗植付具を備えた苗植付部を走行車体に対し昇降可能に設ける。走行車体の走行速度を変速する変速手段と、走行速度に対する苗植付具の作動周期を変更する株間変更手段(A)を設ける。前記苗植付具をその作動周期内において不等速に作動させる不等速駆動手段(B)を設ける。変速手段による変速に応じて不等速駆動手段による不等速作動を変更する制御手段(C)を設ける。
(もっと読む)
水田用作業機
【課題】 多目的化を図った作業機において、転倒などの不都合を招くことなく機体を安定的に走行させるための操縦操作が行われやすくする。
【解決手段】
走行機体1に対する作業装置20の着脱を検出する手段50,51,53と、車速の検出または算出手段60とを備え、作業装置20を外しての走行時には、所定走行速度以上で、作業装置が取り付けられていない状態での走行であることを警告する報知手段15を備えた。
(もっと読む)
作業車両
【課題】作業車両の操向操作性の向上。
【解決手段】走行車両の車速を変速する変速装置と、変速装置の変速位置を選択して設定する変速操作具と、変速操作具による所定の変速操作位置を保持する変速保持手段と、走行車両を操向させるための操向操作手段と、操向操作手段の操向作動に連動して変速保持手段による車速の保持を解除する速度保持解除手段(220)とにより構成する。
走行車両は直進走行作用時には所定変速速度を保持しながら走行し、方向変更時には変速保持手段による車速の保持が解除されて、走行車両の転倒を防止し、操向操作性を向上させる。
(もっと読む)
苗移植機
【課題】走行車体を後進走行に切替操作すると、苗移植機への伝動が自動的に絶たれて、苗植付杆への伝動も中断されて自動停止する。すると、苗植付杆は、定位置で停止できず、植付軌跡の途中で停止しているため、そのまま再開すると、土中にあって破損したり、植え付け開始タイミングが狂ったりする課題がある。
【解決手段】この発明は、上記課題を解消するために、苗植付杆は、定位置停止クラッチに接続して一定の位置で停止する構成とし、走行車体には、前後進切替装置を後進側に操作すると、関連して前記苗植付杆への伝動が絶たれる構成とし、次操作で前記前後進切替装置を前進側に操作すると、前記定位置停止クラッチが、自動的に入・切り制御操作される構成としている苗移植機である。
(もっと読む)
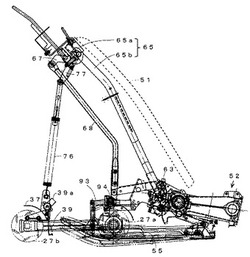
苗移植機
【課題】苗植付部の昇降時にロータの昇降の態様を変化させて苗植付部がロータの昇降で干渉を受けないようにする。
【解決手段】苗植付部4とロータ27a,bを昇降リンク装置40〜43で連結し、植付部4側にバネ95付きのロックケーブル90を、苗植付部4とロータ27a,bとの間にリンク部材76,77,バネ78をロータ27a,bの駆動用のチェーンケース73にスイングアーム92を設ける。苗植付部4の下降しているときにはケーブル90がバネ95に付勢されて、その先端がアーム92の穴92aに挿入され、ロータ27bが苗植付部4に固定され、ロータ27bが苗植付部4の下降動作に連動して圃場面に衝突するおそれがない。また苗植付部4が上昇するとケーブル90が上リンク40などの機体の動きに連動してバネ95の付勢力に抗してケーブル90の先端がアーム92の穴92aから外れて機体に対してロータ27bがフリーとなりバネ78により自由に上下動ができる。
(もっと読む)
乗用型苗植機
【課題】実際の田植作業では昇降制御のセンサーである整地フロートはローリング制御による苗植装置の傾斜修正作動にて泥面から押上げ力を受けて上動する為に、苗植装置は上昇作動してしまい、苗の植付け深さが浅くなって苗が浅植えになったり植付けられなかったりする事態が発生した。
【解決手段】苗植装置25に設けた接地センサー32の接地圧が所定値に維持されるように昇降駆動装置28を制御する昇降制御手段と、苗植装置25の左右傾斜角度を検出する傾斜センサー64の検出値が所定値に維持されるようにローリング駆動装置60を制御するローリング制御手段とを備え、該ローリング制御手段によるローリング駆動装置60の作動中または作動中及び作動後の所定時間は昇降制御手段による苗植装置25を昇降駆動装置28にて上昇作動させる制御を牽制する制御装置51を設けた乗用型苗植機。
(もっと読む)
移植機
【課題】フロートを不要にして植付作業機の軽量化や小型化を可能にするものでありながら、植付作業機の植付深さや整地装置の作用深さを調節できるようにする。
【解決手段】走行機体1の後部に昇降自在に連結され、圃場に苗を植付ける植付作業機7と、該植付作業機7の前部に設けられ、苗植付位置の前方で整地を行う整地装置14とを備える乗用田植機であって、整地装置14の後部に上下回動自在に設けられ、圃場面に追従して上下回動するリヤカバー22と、該リヤカバー22の回動角に基づいて植付作業機7の対地高さを検出するリヤカバーセンサ23と、該リヤカバーセンサ23の検出値に基づいて植付作業機7を昇降制御する制御部28とを備えると共に、整地装置14を植付作業機7に対して昇降自在に支持する。
(もっと読む)
水田作業機
【課題】 電動モータでマーカの姿勢変更を行うに、不適切な時点でのマーカの姿勢変更操作が行われることによるマーカ自体の損傷や操縦者側への泥土の飛散を回避できるようにする。
【解決手段】 植播系作業装置10の高さ位置を判別する高さ位置判別手段13を備え、植播系作業装置10が予め設定された所定高さ以上の高さ位置に存在する状態では、人為操作具61によるマーカ20の下降使用姿勢側への姿勢切り換え指令をマーカ操作機構40に伝えず、植播系作業装置10が所定高さよりも低位に存在する状態では、人為操作具61によるマーカ姿勢切り換え指令をマーカ操作機構40に対して出力するように構成してある。
(もっと読む)
21 - 40 / 57
[ Back to top ]