
Fターム[2B076ED07]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | 前処理部駆動速度 (115) | 引起し装置駆動速度 (11)
Fターム[2B076ED07]に分類される特許
1 - 11 / 11
汎用コンバイン
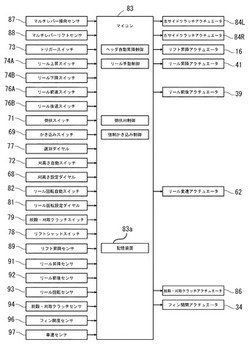
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結し、リール昇降アクチュエータによりリールを自動的に下降させるオートリフト制御の実行時、リールが穀稈に作用する前に刈取部が上昇してしまうことにより生じる稈こぼれを防止し、穀稈を適切に掻込みながら刈取部を自動的に上昇駆動させる汎用コンバインを提供する。
【解決手段】オートリフト制御でリールの刈取部に対する相対高さを検出する高さ検出手段91を設け、制御部83はオートリフト操作手段73によるオートリフト制御の実行時、高さ検出手段91により検出されたリール高さが予め定めた所定高さ以下でない場合にはリールを刈取部に対して下降駆動させるとともに刈取部を低速で上昇駆動させる一方で、高さ検出手段91による検出されたリール高さが上記所定高さ以下の場合にはリールを刈取部に対して下降駆動させるとともに刈取部を高速で上昇駆動させる。
(もっと読む)
コンバイン

【課題】車速に同調して駆動する刈取部を備えながらも、機体を停止又は後退させた場合には、作業者の任意のタイミングで車速とは無関係に刈取部を駆動させることのできるコンバインを提供する。
【解決手段】
走行部を有して自走可能となした機体本体の前方に刈取部を連結し、機体本体の走行部に刈取部を連動連結して、刈取部の刈取速度と走行部の走行速度を同調させたコンバインにおいて、走行部を走行停止又は後退させた場合にも、刈取部を強制的に駆動させる刈取部強制駆動手段を設けているので、走行部を走行停止又は後退させた場合に車速とは関係無く掻き込みリールを回転させることができ、走行車体を後退させるときでも掻き込みリールにより穀稈を取り込むことができる。これにより、特に畦際での作業性を向上させることができる。
(もっと読む)
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの変速制御装置
【課題】
コンバインの発進時における刈取搬送部の駆動変速を適正化し、刈取作業を円滑に行なえるものとする。
【解決手段】
刈取自動変速入切スイッチ(SW1)を入りにすると、主変速レバーポジションセンサ(SE1)の検出値に応じて走行無段変速装置(15)及び刈取無段変速装置(19)の変速設定をし、所定時間後に刈取変速モータ位置検出センサSE2の検出値が設定値より低いときには、刈取無段変速装置(19)の刈取駆動速度に応じて走行無段変速装置(15)を減速変速する。また、検出値が設定値より高いときには、刈取無段変速装置(19)の駆動速度に応じた走行無段変速装置(15)の変速を停止するコントローラ(35)を設ける。
(もっと読む)
コンバイン
【課題】車速が高速になるほど刈取部の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部の駆動を停止する車速連動制御を行うコンバインにおいて、穀稈の押倒しを効率的に防止可能なコンバインを提供することを課題とする。
【解決手段】本発明は、走行機体3に連結された刈取部4と、刈取部4への動力を変速する変速装置46と、変速装置46を介して車速検出手段により検出された車速に刈取部4の駆動速度を連動させて、車速が高速になるほど刈取部4の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部4の駆動を停止する車速連動制御を行う制御部58とを備え、傾斜角検知手段61により走行機体3の所定角以上の前傾斜が検出された場合には、車速検出手段により走行停止が検出された際にも、刈取部4が駆動するように制御部58を構成する。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
コンバイン
【課題】手扱ぎ作業時に、機体の操作を行うことが可能であるとともに、誤操作を防止することができるコンバインを提供する。
【解決手段】コンバインは、エンジンを搭載した走行機体と、刈取部と、脱穀装置と、リモートコントローラ90と、コントローラ装着部91と、機能切替スイッチ98と、を備える。リモートコントローラ90は、走行機体の前進操作及び後進操作が少なくとも可能である。コントローラ装着部91は、リモートコントローラ90を着脱可能に装着可能である。機能切替スイッチ98は、リモートコントローラ90がコントローラ装着部91に装着されたことを検出する。そして、リモートコントローラ90による操作は、当該リモートコントローラ90がコントローラ装着部91に装着されたことを機能切替スイッチ98が押されることで検出した場合にのみ有効となる。
(もっと読む)
普通型コンバイン
【課題】刈取部の昇降と、リールの回転速度とを連動させ、刈取部の上昇に伴いリールの回転速度を一定時間だけ速めて、穀稈を確実にリール内に掻き込み、刈取作業の終了又は一時停止時における圃場の刈取作業面の端部に穀稈の刈残しを防ぐことができる、作業効率を向上させた普通型コンバインを提供する。
【解決手段】穀稈を持ち上げるリールタイン42を複数設けてなるリール26と、このリール26の下方に穀稈を切断する刈刃24および穀稈を移送するプラットフォームオーガ23を有する刈取部27と、を機体前部に昇降自在に備える普通型コンバインにおいて、リール26の回転速度は、車速に同調するとともに、刈取部27の上昇操作に連動して変速する。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
コンバイン
【課題】穀稈搬送装置の駆動速度の変更によって、穀稈搬送装置によって搬送中の穀稈の搬送姿勢が乱れるのを防止できるものでありながら、穀稈引起装置穀稈引起速度だけを速くすることができたり、穀稈搬送装置だけを駆動できるようにしたコンバインを提供するものである。
【解決手段】コンバインにおいて、穀稈引起装置223を駆動する引起駆動用電動モータ90と、刈刃装置222を駆動する刈刃駆動用電動モータ91と、穀稈搬送装置224を駆動する搬送駆動用電動モータ92とを備え、穀稈引起装置223と刈刃装置222と穀稈搬送装置224とをその各々の電動モータ90,91,92によって駆動するように構成したものである。
(もっと読む)
収穫機
【課題】圃場の作物の性状又は収穫作物の性状等に適応した最適な回転数で搬送手段を作動でき、収穫作業性を向上できるようにした収穫機を提供するものである。
【解決手段】走行部2を備えた走行機体と、収穫作物を搬送する複数の搬送手段6,223,224,234とを備えてなる収穫機において、前記複数の搬送手段6,223,224,234毎に、それら搬送手段6,223,224,234を作動する複数の電動モータ90,92,93,94を備え、各電動モータ90,92,93,94によって各搬送手段6,223,224,234を個別にそれぞれ作動するように構成したものである。
(もっと読む)
1 - 11 / 11
[ Back to top ]