
Fターム[2B304QA15]の内容
Fターム[2B304QA15]に分類される特許
1 - 20 / 22
作業機のアンロード装置
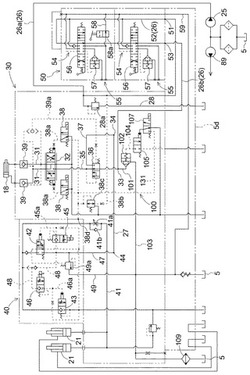
【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
トラクタの作業機上限規制装置

【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
作業車両
【課題】対地作業機を牽引する作業車両において、傾き一定制御の実行中に走行機体を旋回させると、遠心力のせいで対地作業機が誤制御されるという問題を解消する。
【解決手段】本願発明の作業車両1は、走行機体2の後部にリンク機構を介して装着された対地作業機24と、該対地作業機24を前記走行機体2に対して左右に傾動させる傾斜制御アクチュエータ32と、前記走行機体2に設けられた傾斜検出手段81及び角速度検出手段82とを備える。前記両検出手段81,82の検出結果に基づく前記傾斜制御アクチュエータ32の駆動によって前記対地作業機24の傾き一定制御を実行するように構成する。前記傾き一定制御の実行中に前記走行機体2を旋回させた場合は、前記両検出手段81,82の検出結果に拘らず、前記対地作業機24が前記走行機体2に対して予め規定された設定角度となるように前記傾斜制御アクチュエータ32を駆動させる。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
耕深情報取得装置及びトラクタ
【課題】ロータリ作業機の傾き量を加味して、耕耘深度に関する情報を精度良く取得する。
【解決手段】揺動レーキ66、スプロケット78a,78b及びローラチェーン80が地面からの鉛直方向高さ位置の変化に応じて回転軸76aを回転し、ポテンショメータ74が、回転軸76aの回転量に関する情報を検出し、振り子部材72が、ロータリ作業機の地面に対する姿勢変化に関わらず、ポテンショメータ74の鉛直方向に対する姿勢を維持する。これにより、ポテンショメータで検出される回転軸の回転量に関する情報に、高さ位置の変化分のみならず、ロータリ作業機の地面に対する傾き量分も含めることができる。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
作業機
【課題】後進時において機体の地面への接触を防止しつつ、姿勢の水平制御が可能な作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対する機体の支持高さを昇降させるために当該機体の左右に配置される機体昇降シリンダと、を備える。また、コンバインは、機体の左右傾斜角を検出する傾斜角センサと、機体の前後進操作が可能な主変速レバーと、傾斜角センサの検出値に応じて機体昇降シリンダを制御することで機体を水平制御することが可能な制御部と、を備える。制御部は、操作部の後進操作が検出され(S103)、更に後進速度が所定速度以上であると(S104)、一側の前記機体昇降シリンダを伸長させて機体が最上端になる位置で維持するとともに、他側の前記機体昇降シリンダを伸縮させることで機体を水平に制御する(S106〜S109)。
(もっと読む)
移植機
【課題】感知体の土圧感知に基づいて植付作業機の対地高さを制御するものにおいて、構成がシンプルで且つハンチングの発生を効率的に抑制できる移植機を提供することを課題とする。
【解決手段】走行機体3と、走行機体3に昇降自在に連結された植付作業機7と、植付作業機7を昇降駆動させる油圧式の昇降シリンダー9と、前記昇降シリンダー9を伸縮作動させる昇降バルブ18と、植付作業機7に設けられ圃場面からの土圧を感知する感知体12と、感知体12の土圧感知に昇降バルブ18の開閉を連動させる連係手段32とを備えた移植機において、非接地高さにある植付作業機7を下降作動させ、植付作業機7が圃場に接地すると、それ以降、感知体12の土圧感知に基づく対地高さ制御中に昇降バルブ18の植付作業機7下降側の開度が全開にならないように規制する規制手段33を設け、植付作業機7の下降スピードを制限する。
(もっと読む)
コンバイン
【課題】走行機体を方向転換させるときのエンジンの過負荷運転を防止でき、且つ運転操作性を向上できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3と、脱穀装置5と、脱穀装置5の扱胴26に穀稈を供給するフィードチェン6とを備えてなるコンバインにおいて、刈取装置3の刈取りを停止する刈取停止手段としてのクラッチスイッチ71または位置センサ72のいずれか一方と、クラッチスイッチ71または位置センサ72のいずれか一方の刈取り停止動作に基づきフィードチェン6を停止させる断続手段としてのクラッチモータ68及びコントローラ70とを備え、刈取装置3を停止することによって、フィードチェン6を停止させるように構成しているものである。
(もっと読む)
姿勢制御装置
【課題】車輌本体の連結された一の耕耘機を他の耕耘機に取り替えた場合であっても、該他の耕耘機の位置制御を良好に行える姿勢制御装置を提供する。
【解決手段】位置制御を司る制御手段に種別の異なる耕耘機毎の制御条件を記憶させておき、耕耘リヤカバーが耕耘爪の回動軌跡に最も近づいた状態での該耕耘リヤカバーの最閉回動角度に基づいて当該耕耘機の種別を判別し、予め記憶されている前記制御条件のうち判別された当該耕耘機用の制御条件を用いて位置制御を行う。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、圃場の枕地など地面に大きな凹部または凸部が形成された場所であっても、リヤカバーの均平作用を維持して、既耕耘地面の表面が均平になるように、前記耕耘機の耕耘深さ自動制御を実行できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘爪の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記耕耘制御手段は、前記リヤカバーが最閉位置側から設定耕耘深さ位置の方向に回動したときに、一定時間の間だけ、前記耕耘爪の耕耘深さを演算するための制御ゲインを低減して、前記昇降制御アクチュエータの下降側の作動を緩やかにするように制御するものである。
(もっと読む)
作業車両の制御システム
【課題】運転者の操作労力負担の軽減を図り、作業車両本来の性質や機能を最大限発揮させた最適な使用を可能とし、地域ごとの整地性能や整地精度を従来より向上させ、更に委託農業など、作業内容について知らない人でも作業が可能となる作業車両の制御システムを提供すること。
【解決手段】少なくともトラクタ10に装着されたロータリ、代掻き、薬液散布及び肥料散布などのいずれかの専用の作業機30の種類及び作業機30の耕深量の程度、走行変速位置の選択など作業機30の機能とトラクタ10の地域情報に応じて、作業機30の種類及び機能機30の機能情報から最適な作業機30の機能を自動で設定・制御する中央制御手段50を備えている。
(もっと読む)
作業機装着装置
【課題】 水平姿勢を維持するのが好ましいブロードキャスタ等の作業機を三点リンクヒッチ機構を介してトラクタに連結した場合に、三点リンクヒッチ機構を上下動させても作業機が一定の姿勢を保つようにする。
【解決手段】 トラクタ1に三点リンクヒッチ機構3を介して上下揺動自在に装着される支持フレーム16を備え、この支持フレーム16に直装式作業機1が取り付けられる取付フレーム17を枢軸25を介して左右軸回りに回動自在に枢支連結し、前記三点リンクヒッチ機構3を上下動させても作業機1が一定の姿勢を保つように取付フレーム17を前記枢軸25回りに回動させるためのアクチュエータ18を設ける。
(もっと読む)
農作業機の昇降操作装置
【課題】 走行機体に連結した作業装置を油圧シリンダで駆動昇降するよう構成するとともに、前記油圧シリンダの作動を司る制御バルブを、上昇位置、および、下降位置に亘って操作可能な昇降レバーによって切換え操作するよう構成した農作業機の昇降操作装置において、作業装置を大きく昇降させる場合には速やかに昇降させることができるとともに、少しだけの昇降を簡単かつ正確に行えるようにする。
【解決手段】 昇降レバーの操作径路における、「中立」位置と「上昇」位置との間を、「上昇」位置に操作されたときの基準上昇速度Vusと異なる速度で作業装置を上昇作動させる上昇用中間操作域に設定するとともに、「中立」位置と「下降」位置との間を、「下降」位置に操作されたときの基準下降速度Vdsと異なる速度で作業装置を下降作動させる下降用中間操作域に設定してある。
(もっと読む)
作業車の作業装置昇降操作装置
【課題】 作業装置昇降用のポジション制御弁がポジションレバー30や電動モータ31によって操作される作業車において、電動モータ31によるポジション制御弁の操作によって作業装置が上昇された後、ポジションレバー30をわずかに上昇側に操作すれば、電動モータ31による作業装置上昇保持を解除できるようにする。
【解決手段】 ポジションレバー30の上昇側の操作限界を設定するストッパー61を、作用位置変更自在に設けてある。電動モータ31を操作する昇降制御手段は、ストッパー61の作用位置を検出するセンサ64、及びポジションレバー30の操作位置を検出するセンサ67の検出情報を基にストッパー61がストップ作用したことを検出し、この検出結果を基に、電動モータ31を下降操作側に操作する。
(もっと読む)
1 - 20 / 22
[ Back to top ]