
Fターム[2B304QA25]の内容
Fターム[2B304QA25]に分類される特許
1 - 20 / 21
田植機
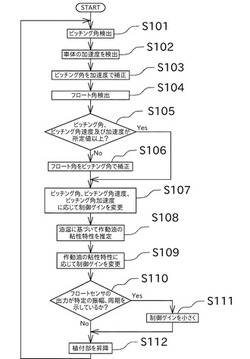
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
移植機

【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行えるようにする。
【解決手段】機体の前後方向の傾斜を検出するピッチングセンサ69が所定の傾斜角以上の機体の前上がり傾斜を検出している時、自動昇降制御中にはフロート23の基準姿勢を基準値かた前下がり状態に姿勢変更して自動昇降制御を継続し、自動昇降制御中でなければ植付を停止した状態でフロート23を接地させた植付作業機5の自動昇降制御を実行する制御手段61を設ける。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
牽引作業車両の対地作業機昇降制御装置
【課題】本発明の目的は、昇降調節とともに傾動動作するいわゆる2Pリンク式のヒッチに装着された対地作業機について、その耕耘作業部の昇降誤差を抑えて所要の耕深を確保することができる牽引作業車両の対地作業機昇降制御装置を提供する。
【解決手段】牽引作業車両の対地作業機昇降制御装置は、傾動制御可能なリフトアーム2によって後部ヒッチ3を一体に支持し、この後部ヒッチ3に検出橇13を圃場面に追従可能に軸支し、その傾動角度と対応する圃場面からの高さに基づいて、上記後部ヒッチ3からその後方に延出して一体装着した作業機フレーム4aを昇降作動制御することにより、同作業機フレーム4aに支持される耕耘作業部6を耕深設定具24によって設定した目標の耕深Dに調節するように構成され、上記検出橇13の圃場面に対する角度dと対応する耕耘作業部6の高さを作業機フレーム4aの昇降角度値Δによって補正するものである。
(もっと読む)
乗用田植機
【課題】苗継ぎ時に、植付部を所定の高さまで上昇させるとともに、当該植付部を傾斜させることにより、苗継ぎ作業に必要な労力を低減することが可能な田植機を提供する。
【解決手段】走行部10と、走行部10の後部に具備され、植付作業を行う植付部30と、上部リンク52及び下部リンク53を備え、植付部30を走行部10に対して昇降可能に支持する昇降リンク機構50と、を具備する乗用田植機1において、上部リンク52を伸縮させることにより、走行部10に対する植付部30の相対角度θを変更する角度変更アクチュエータ52cと、昇降リンク機構50により、植付部30を所定の高さに調節するとともに当該高さで停止させ、角度変更アクチュエータ52cにより、植付部30の相対角度θを所定の相対角度θs−dβ1に調節する苗継ぎ制御を行う制御部100と、を備えた。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
作業車の姿勢制御装置
【課題】 走行装置に対する車体の姿勢が大きく変化するおそれが少ない場合には車体の姿勢変更速度を遅くして乗り心地が低下することを防止しながらも、走行装置に対する車体の姿勢が大きく変化するような場合には迅速に姿勢変更操作を行うことが可能な作業車の姿勢制御装置を提供する。
【解決手段】 車体における傾斜角変更方向に離れた一端側箇所及び他端側箇所夫々を走行装置の接地部に対して昇降自在な複数の駆動手段を備え、傾斜角検出手段の検出情報に基づいて、車体の水平基準面に対する傾斜角が設定傾斜角に維持されるように駆動手段を制御する姿勢変更制御を実行するように構成され、走行装置に対する車体の姿勢が大きく変化すると予測される姿勢変動タイミングでないことが判別されると片側駆動形式の姿勢変更操作を実行し、且つ、姿勢変動タイミングであることが判別されると両側駆動形式の姿勢変更操作を実行する。
(もっと読む)
作業車の姿勢検出装置及び作業車の姿勢制御装置
【課題】 車体が前後方向に移動するときに加速度が発生する場合であっても、車体の水平基準面に対する傾斜角を適正に検出することが可能となる作業車の姿勢検出装置を提供する。
【解決手段】 車体の前後傾斜角を求める傾斜角算出手段300が、加速度検出手段200にて検出される加速度が設定値より大きいとき及び加速度が設定値よりも大きい状態から小さい状態になったのち検出状態復帰用設定時間が経過するまでの間は、加速度が設定値よりも大きくなったときにおいて求めている車体の前後傾斜角、及び、時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求め、且つ、加速度が設定値より小さく且つ検出状態復帰用設定時間以外のときには、時間経過に伴って順次検出される傾斜角センサ24の検出値及び時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求める。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機24付きのトラクタ1において、耕地の硬軟度に左右されることなく、耕耘深さ自動制御を実行できるようにする。
【解決手段】 ロータリ耕耘機24には、その耕耘深さRDを検出するリヤカバーセンサ124を設ける。走行機体2には、ロータリ耕耘機24の目標耕耘深さRD0を予め設定する耕深設定器と、走行機体2の対地高さを検出する超音波センサ130とを設ける。耕耘制御コントローラは、基準車高値VH0と超音波センサ130の検出値SWとから沈下量SKを演算して、該沈下量SKに応じてリヤカバーセンサ124の補正後検出値と補正後目標耕耘深さとを求め、補正後検出値に基づいて、ロータリ耕耘機24の現在の耕耘深さRDが補正後目標耕耘深さとなるように昇降制御油圧シリンダの駆動を制御する。
(もっと読む)
作業機の姿勢制御装置
【課題】前記耕耘機の耕耘作業を簡単な動作で実行するものでありながら、前記耕耘機の耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御の設定値を、具体的な数値に基づいて、高精度に設定できる作業機の姿勢制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機を前記作業車両に対して左右に傾動させる傾斜制御アクチュエータと、前記昇降制御アクチュエータまたは前記傾斜制御アクチュエータを作動させる姿勢制御手段とを備えてなる作業機の姿勢制御装置において、前記耕耘機に、既耕耘地表面との距離を計測する既耕地用の距離計測センサと、未耕耘地表面との距離を計測する未耕地用の距離計測センサとを備え、前記姿勢制御手段は、前記距離計測センサの検出結果に基づき、前記昇降制御アクチュエータまたは前記傾斜制御アクチュエータを作動させるように制御するものである。
(もっと読む)
ロータリ作業機の耕深制御装置
【課題】ロータリ作業機の耕深制御装置において、走行速度の変速時にも作業機の地面に対する追従性を良くする。
【解決手段】トラクタ1の後部にロータリ作業機3を昇降調節可能に連結し、作業機3に上下回動自在に装着されているリヤーカバー3aの回動角度を検出するリヤーカバーセンサ32を設け、耕深調整ダイヤル7により設定された耕深目標値を維持すべくリヤーカバー3aの回動角度を調節するようにリフトアーム26を上下回動し作業機3を昇降制御する。トラクタ1にピッチング角速度センサ19を設け、リヤーカバーセンサ32の検出値とピッチング角速度センサ19の検出値に基づき作業機3を昇降させる作業機昇降手段を設け、この作業機昇降手段の昇降速度を機体1の走行速度に応じて補正し、走行速度が速いときには作業機3の昇降速度を速くし、走行速度が遅いときには作業機3の昇降速度を遅くする。
(もっと読む)
作業車両の姿勢制御装置
【課題】農作業機を用いた農作業が簡単な運転操作で実行できるものでありながら、作業車両の転倒を防止する制御を容易にできる作業車両の姿勢制御装置を提供する。
【解決手段】リンク機構を介して昇降可能に装着した農作業機に、車両の傾斜角を検出する傾斜センサ120,131と、走行速度を検出する車速センサ127とによる検出結果に基づき作業車両の姿勢制御装置において、総合転倒角を、前記農作業機を前記作業車両に連結した場合の前記作業車両の転倒角とするとき、前記総合転倒角よりも所定角度だけ小さい警報値以上になったときに、オペレータに警報するための警報手段134と、前記傾斜センサの検出値が前記総合転倒角より一定角度小さく且つ前記警報値より大きくなったときに、前記作業車両のエンジンの回転数を強制的に低下させるエンジン回転制御手段114とを備えた。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサからの検出信号と角速度センサからの検出信号に基づい姿勢制御用の駆動機構を作動制御して、作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、エンジン始動直後における角速度センサの零点値設定を好適に行うことができるようにする。
【解決手段】
走行機体に搭載されたエンジンの起動時に、角速度センサからの検出信号を所定複数回に亘って取得し、取得した検出信号の全ての値が設定範囲内にあればこれら複数回の検出信号を平均処理して角速度センサの零点値に設定し、取得する複数回の検出信号に前記設定範囲から外れた値のものが含まれていると、予め記憶されている暫定零点値を角速度センサの零点値に設定する零点設定手段を備えてある。
(もっと読む)
コンバイン
【課題】刈取装置の圃場へ突っ込みを確実に防止する。
【解決手段】走行機体1に昇降制御可能に支持した刈取装置7と、該刈取装置の対地高さを検出する刈高さセンサ21と、該刈取装置の走行機体に対する昇降位置検出を検出する昇降位置センサ22と、該刈高さセンサ21と昇降位置センサ22の検出値に基づいて刈取装置を昇降装置18により昇降制御するコントローラ30とを備えたコンバインにおいて、走行機体が前後方向へ傾動したときの加速度を検出する加速度センサ25と、走行機体が前後方向へ傾動したときの傾動速度を検出する速度センサ26と、走行機体の水平基準面に対する前後傾斜角を検出する前後傾斜角センサ27とを走行機体に設け、前記制御手段で刈高さセンサと昇降位置センサの検出値とともに、加速度センサと速度センサと前後傾斜角センサの各検出値に基づいて刈取装置を昇降装置により昇降制御可能に構成した。
(もっと読む)
苗植機の苗植昇降制御装置
【課題】 車体の畦越え時の植終い作業では、車体が畦越え走行によって大きく前上り、(乃至後下り)の傾斜姿勢となるため、この車体の後部に装着された苗植装置のフロートによる接地センサでの苗植深さ検出では、苗植装置を苗植付位置や畦越え位置への昇降制御を行わせることは難しく、操作性が煩雑で、間に合わないことや、誤操作が多い。
【解決手段】 苗植装置の対地高さを一定に維持するように制御する植付昇降制御モードと、苗植車体の前後傾斜に基づいて該苗植装置を自動的に昇降させて畦越えしながら苗植付する畦越え植付昇降制御モードとを備えたことを特徴とする苗植機の苗植昇降制御装置の構成とする。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
コンバインの走行姿勢制御装置
【課題】刈取機を所定高さ位置へ上昇操作して、旋回操作したときには、機体が左右に傾斜すると、左右両側のクローラは昇降制御されることにより、機体が転倒して危険であった。
【解決手段】穀稈を刈取る刈取機8と、穀稈を脱穀する脱穀機9とを設け、所定のスイッチ12の「ON」操作で、刈取機8と、脱穀機9のフィードチェン10との作動を自動停止し、機体1aの左右傾斜と、前後傾斜を検出するローリングセンサ6と、ピッチングセンサ7とを設け、刈取機8が所定高さ位置まで上昇させて停止させると、機体1aをローリング装置4でのローリング制御を停止制御する構成である。
(もっと読む)
水田作業機
【課題】 接地フロート12が設定姿勢になるように水田作業装置10を昇降制御するものでありながら、自走車体や水田作業装置の走行速度や姿勢の変化にかかわらず、接地フロート12が田面に対して適切な姿勢で接地するように、かつ、ハンチングが発生しにくいようにする。
【解決手段】 昇降制御手段55は、フロート角センサ50による検出情報を基に設定制御目標フロート角を設定し、フロート角センサ50による検出フロート角が設定制御目標フロート角になるようにリフトシリダ6を操作する。昇降制御手段55は、車速感応モードになると、車速センサ52による検出車速が高速であるほど制御感度がより鈍感になるように制御感度を補正する。昇降制御手段55は、傾斜角補正モードになると、自走車体の傾斜角センサ51による検出前上がり傾斜角が設定値より大であるほど設定制御目標フロート角に対応するフロート姿勢が前下がり方向になった状態の設定制御目標フロート角を設定する。
(もっと読む)
作業機装着装置
【課題】 水平姿勢を維持するのが好ましいブロードキャスタ等の作業機を三点リンクヒッチ機構を介してトラクタに連結した場合に、三点リンクヒッチ機構を上下動させても作業機が一定の姿勢を保つようにする。
【解決手段】 トラクタ1に三点リンクヒッチ機構3を介して上下揺動自在に装着される支持フレーム16を備え、この支持フレーム16に直装式作業機1が取り付けられる取付フレーム17を枢軸25を介して左右軸回りに回動自在に枢支連結し、前記三点リンクヒッチ機構3を上下動させても作業機1が一定の姿勢を保つように取付フレーム17を前記枢軸25回りに回動させるためのアクチュエータ18を設ける。
(もっと読む)
1 - 20 / 21
[ Back to top ]