
Fターム[2B304QB05]の内容
Fターム[2B304QB05]の下位に属するFターム
Fターム[2B304QB05]に分類される特許
1 - 20 / 31
田植機
【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
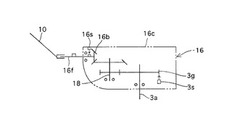
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
田植機

【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体の走行距離を検出する走行距離検出手段27を備える。作業装置の上昇操作に基づいて、機体の走行距離の検出が開始される。機体の走行距離が設定距離に達すると、上昇状態の作業装置を地面まで自動的に下降駆動する自動下降手段を備える。
(もっと読む)
作業車
【課題】 作業車において、機体の後部のリンク機構にロータリ耕耘装置を連結自在に構成した場合、畦を越えながら圃場を出る際に地面に深い穴が残らないように構成する。
【解決手段】 畦を越えながら圃場を出る際に、PTOクラッチを伝動状態に維持した状態で、低速で昇降アクチュエータを上昇作動させて、ロータリ耕耘装置11を上昇駆動する。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回制御を行なうと共に、マーカ作動操作具220の左右線引きマーカ195の作動を停止させる操作にて該自動旋回制御を行わない状態に切り替える制御装置170を設けた乗用型苗移植機。
(もっと読む)
移植機
【課題】移植機において、苗のせ台が左右のいずれか一方向に移動して移動端に到達した後、その移動方向を切替えて反対方向への移動を開始する際、移植部の苗のせ台の移動方向が上がる方向の傾斜を増長する不具合を防止する。
【解決手段】走行機体に左右傾動自在に連結され、かつ左右方向に往復移動される苗のせ台を有する移植部と、前記走行機体と移植部との間に介在され、前記移植部を左右傾動させる水平自動モータ93と、前記移植部の左右傾動を検出する傾斜センサ90と、前記苗のせ台の左右移動端を検出する終端検出手段75と、前記終端検出手段75に基づき前記苗のせ台の左右いずれか一方端を検出した際、前記傾斜センサ90に基づく前記水平自動モータ93の出力指令があっても、所定時間、該出力指令による前記水平自動モータ93の作動を停止する制御装置80を備えてなる。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機24付きのトラクタ1において、耕地の硬軟度に左右されることなく、耕耘深さ自動制御を実行できるようにする。
【解決手段】 ロータリ耕耘機24には、その耕耘深さRDを検出するリヤカバーセンサ124を設ける。走行機体2には、ロータリ耕耘機24の目標耕耘深さRD0を予め設定する耕深設定器と、走行機体2の対地高さを検出する超音波センサ130とを設ける。耕耘制御コントローラは、基準車高値VH0と超音波センサ130の検出値SWとから沈下量SKを演算して、該沈下量SKに応じてリヤカバーセンサ124の補正後検出値と補正後目標耕耘深さとを求め、補正後検出値に基づいて、ロータリ耕耘機24の現在の耕耘深さRDが補正後目標耕耘深さとなるように昇降制御油圧シリンダの駆動を制御する。
(もっと読む)
1 - 20 / 31
[ Back to top ]