
Fターム[2C014DA02]の内容
Fターム[2C014DA02]に分類される特許
1 - 20 / 32
誘導装置
【課題】 従来の誘導装置は、目標に向けて垂直偏波と水平偏波の電波を送信して、目標から反射してきた信号を受信し、受信信号を偏波信号処理することでクラッタ信号の中から偏波特性の違う目標信号を検出して追尾する。しかし、海上の波が複数の周期性を含む場合には、クラッタの偏波特性があいまいとなって、偏波信号処理によるクラッタ抑圧効果が得られず、目標信号を検出できないという課題があった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、誘導装置が偏波信号処理によってクラッタ信号の中から目標信号を検出する際に、予めドップラ信号処理によってクラッタの周波数成分を分解してクラッタの偏波特性のあいまいさを低減する。これにより、偏波信号処理時の目標検出性能を向上することを可能とした。
(もっと読む)
目標検出装置

【課題】近接信管を搭載する飛しょう体において、地上の目標との相対距離差を利用して目標検出を行う場合、目標付近に樹木等の目標以外の物体があると、樹木等を目標と誤検出するという課題がある。
【解決手段】 目標に向けレーザ光を送信する送信部と、レーザ光が前記目標で反射された反射波を受信する受信部と、前記反射波に基づき目標を抽出する信号処理部とを備え、信号処理部は、同じ飛しょう体が搭載するシーカが取得した前記目標に係る目標情報(主に測角情報)に基づき目標方向を限定していくことで目標以外の物体への誤検出を防止する。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化をさらに改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】第1の方向の信号と第2の方向の信号とから異なるタイミングにて検出した第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角を算出し、機体レートとビーム指向角と第1のタイミングから第2のタイミングまでの時間間隔とから推定目視線角の変動量を算出し、変動量により第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角とを補正して第1の方向の推定目視線角と第2の方向の推定目視線角とを算出し、第1の推定目視線角と第2の推定目視線角とから誘導信号を算出する。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】広い周波数帯でのインターフェロメータでの測角処理を短時間で効率良く行い得る。
【解決手段】飛しょう体における略円筒筐体となるレドーム先端の円形領域の中央に配置され、レドームを通じて飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、レドームの側面に周面に沿って配置され、第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群と、観測する周波数帯に応じて第1のパッシブアンテナ素子群のうち配列間隔が異なる複数の素子を選択し、これら選択した複数の素子それぞれの受信信号及び第2のパッシブアンテナ素子群のうち任意の素子の受信信号を用いて目標方向の方位角及び高低角のうちの少なくとも1つを粗測角演算するパッシブ信号処理部と、パッシブ信号処理部で得られる粗測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段とを備えた複合誘導装置を提供できる。
(もっと読む)
レーザ誘導装置
【課題】レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】レーザ発振部103と受信部104を備えた飛しょう体1において、目標2を含む走査範囲にレーザ発振部103で発振したレーザ光を照射する。反射光を受信部104で検出し、反射光の受信強度と発振から受信までの遅延時間を用いて画像生成部105において走査範囲の強度画像と3次元画像を生成する。目標認識部106において3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定し、非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
誘導装置
【課題】ミサイルなどの飛翔体に搭載される誘導装置で、誘導信号の変動および角度追尾のレスポンス悪化を招くことのない誘導装置を得る。
【解決手段】発振器とアンテナジンバルに搭載するフロントエンドに温度センサを取り付け、発振器温度とフロントエンドの温度を実運用する際の範囲で変動させて、発振器温度とDIF系またはSUM系信号位相の温度変動分のデータベースを構築する。同様にフロントエンドに搭載するフロントエンド温度と残りの系のIF信号位相差のデータベースを構築する。構築したデータベースを用いて、線形補間により各部温度からDIF系およびSUM系のIF信号位相の温度変動分を予測する。予測で求められたDIF系、SUM系IF信号の位相差分を位相器で補正することでDIF系、SUM系IF信号位相差を低減することができ、誘導信号の温度による変動を防ぐことができるため、角度追尾のレスポンス低下を防ぐことができる。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
(もっと読む)
レーザ分配装置
【課題】小型かつ低消費電力の光波装置を実現するためのレーザ分配装置を提供する。
【解決手段】レーザ光を出射するレーザ発生器11と、レーザ発生器11で発生されたレーザ光を分配して出射する音響光学素子光19と、音響光学素子光19に電圧を供給することにより、音響光学素子光19がレーザ光を分配して出射するように制御するドライバ20と、それぞれ、光を伝搬するコア21−1A、21−2Aおよびコア21−1A、21−2Aの周囲を覆うクラッドにより構成された複数の光ファイバ21−1、21−2により構成され、これらの光ファイバ21−1、21−2を構成する複数のコア21−1A、21−2Aのいずれかに、音響光学素子19から出射されるレーザ光が入射されるように配置されたバンドルファイバ13と、を具備する。
(もっと読む)
飛しょう体誘導装置
【課題】指向誤差による悪影響を効果的に軽減し命中精度を高めることの可能な飛しょう体誘導装置を提供すること。
【解決手段】ビーム指向角(Q)とビーム指示角(λ)との指向誤差Δが極小となるポイントを予め計測する。また、目標との相対距離Rに基づく閾値判定により遠方モードと近接モードとの2つのモードに誘導モードを切替える。遠方モードにおいては電子走査型アンテナの全ての送受信モジュールを機能させて受信利得を稼ぐとともに、連続的なビーム指示角λを与えてビームを目標に指向させる。近接モードにおいてはこのモードへの切換の直前までに算出されたビーム指示角λに近いポイントに、ビーム指示角λを固定するとともに、一部の送受信モジュールのみを機能させ、アンテナアレイ面中央のアンテナ素子を用いることでビームを広角化する。
(もっと読む)
飛しょう体誘導装置
【課題】目標に向け飛しょう体を確実に誘導することの可能な飛しょう体誘導装置を提供する。
【解決手段】飛しょう体2に搭載される誘導装置3にパッシブ系統とアクティブ系統とを合わせて搭載し、まずパッシブ系統のみによる観測を開始する。パッシブ系統は、目標1からの反射波が無い遠方の段階で、他のレーダ装置の電波到来方向を観測しておき、得られた方向を誘導禁止範囲として設定する。その後、目標反射波が受信され始めた段階で、目標反射波がこの誘導禁止範囲に無いことを判定したうえで目標1の追跡を開始する。追跡の最終段階ではアクティブ系統も機能させ、飛しょう体2の誘導装置3自らが検出する目標方向と、他のレーダ装置からの目標反射波とのデータ融合を実施することで、角度検出の精度、ひいては追跡の精度を向上させる。
(もっと読む)
誘導装置及び目標判定装置
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
誘導装置
【課題】複数のバンドの周波数の電波を送出することにより小RCS目標の対処性能を向上させる際に、送受信機の大型化を抑えて飛しょう体への搭載が可能な誘導装置を提供する。
【解決手段】誘導装置は、局発信号及びIF信号を励振するとともに局発信号の周波数にIF信号の周波数を加算して得た周波数のハイバンド送信信号とIF信号の周波数と同じ周波数のローバンド送信信号とを生成する共通励振部と、目標で反射して戻ったハイバンド送信信号を受信して得たハイバンド受信信号を局発信号によりダウンコンバートするハイバンドフロントエンドと、ハイバンドフロントエンドから出力されたダウンコンバートされたハイバンド受信信号と目標で反射して戻ったローバンド送信信号を受信して得たローバンド受信信号とが入力される共通受信部と、を備えた。
(もっと読む)
飛翔体
【課題】低周波のレーダ電波を受信すること。
【解決手段】アンテナ装置10が受信したレーダ電波に基づいて自身の位置が制御される飛翔体であって、アンテナ装置10が複数のアンテナ群20a、20b、20cを備え、アンテナ群20a、20b、20cは、複数のアンテナ素子30を有し、機体表面の複数箇所に分散して配置される。また、アンテナ群20a、20b、20cは機体の軸方向に所定間隔をおいて設けられ、かつ、各アンテナ群20a、20b、20cが備えるアンテナ素子30は機体の周方向に亘って帯状に配列される。
(もっと読む)
誘導装置
【課題】至近距離で目標機を検出可能とし、弾頭起爆を可能にする誘導装置を提供する。
【解決手段】飛しょう体に搭載され、目標を追跡して飛しょう体を目標に誘導する誘導装置であって、目標に向けて電波を送信し、目標からの反射波を受信するアンテナユニット8と、電波のビームを第1の角度と第1の角度より広角の第2の角度とで選択的に形成するアンテナ制御器20と、電波を第1の送信間隔で送信する第1の送信と、電波を第1の送信間隔より短い第2の送信間隔で送信する第2の送信とを選択的に行う励振受信器9と、受信された反射波をもとに目標との相対距離を検出する距離検出器13と、初期状態で、第1の角度のビーム及び第1の送信間隔で電波を送信させ、相対距離が所定の距離より小さくなった時点で第2の角度のビーム及び第2の送信間隔に切り換える切換制御器15とを備える。
(もっと読む)
誘導装置
【課題】目標に接近するまでの間に他の通信設備から目標に関する情報を効率的に受信可能とする。
【解決手段】誘導装置3は、通信設備からの通信波を受信すると共にレーダ波を送受信するアンテナ7と、通信波のビームを通信設備の方向に形成する第1のビーム形成とレーダ波のビームを目標の方向に形成する第2のビーム形成とを行うアンテナ制御器11と、アンテナ7の受信信号から通信設備から伝送される目標情報を得る通信処理系統と、アンテナ7から目標に向けてレーダ波を送信し、目標からの反射波を受信して目標を検出する誘導処理系統とを備える信号処理器12と、飛翔体の位置を逐次検出する慣性航法装置26と、初期状態で、第1のビーム形成を行うと共に通信処理系統を実行させ、目標情報が得られた場合には検出された位置をもとに目標が検出可能となった時点で第2のビーム形成を行うと共に誘導処理系統に切り換えるモード切替器23とを具備する。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化を改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】1回目の第1の方向の誤差角の検出と2回目の第1の方向の誤差角の検出の間に、1回目の第2の方向の誤差角の検出と2回目の第2の方向の誤差角の検出を行い、1回目に検出した第1の方向の誤差角と2回目に検出した第1の方向の誤差角との相加平均を基準時間Tにおける第1の方向の誤差角とし、1回目に検出した第2の方向の誤差角と2回目に検出した第2の方向の誤差角との相加平均を基準時間Tにおける第2の方向の誤差角とする。
(もっと読む)
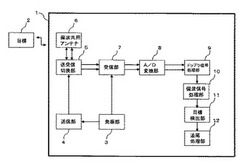
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から反射してきた信号を受信することにより目標信号を検出して追尾するが、目標信号以外に妨害機から送信されたECM信号を受信した場合には、ECM信号を目標信号であると誤認識し、目標ではなくECM信号を追尾することがあった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、水平偏波及び垂直偏波の受信信号の電力レベルを比較することにより、誘導装置が目標信号を検出する際に目標からの反射信号とECM信号を識別して、安定して目標を追尾することを可能にするものである。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
飛しょう体誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由した信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタを追尾し、誤ロックすることがあった。
【解決手段】 従来は目標方向のみに電波を送信していたが、本方式では、目標方向及びクラッタ方向に角度を切換えながら電波を送信することで、目標方向及びクラッタ方向の2種類の受信信号を得ることができ、この2種類の受信信号を比較することでクラッタ信号を除去し、クラッタに誤ロックすることなく目標を正確な角度で追尾することが可能となる。
(もっと読む)
1 - 20 / 32
[ Back to top ]