
Fターム[2C150ED08]の内容
Fターム[2C150ED08]の下位に属するFターム
上下 (12)
前後又は左右 (54)
全方向 (29)
方向変換の手段又は部材 (44)
Fターム[2C150ED08]に分類される特許
21 - 30 / 30
ボート玩具
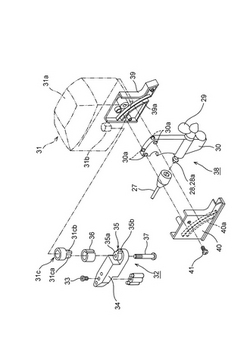
【課題】 波の状態または好みに応じてスクリューの角度と深さを微細に調整することができ、色々な走行を楽しむことのできるボート玩具を提供する。
【解決手段】 スクリュー29を駆動源26で駆動し、スクリュー29を支持する舵を兼ねたスクリューブラケット30をサーボ機構31で水平方向へ回動させるボート玩具21において、駆動源26を船体22の内側に取り付け、スクリュー29を駆動源26で駆動されるドライブシャフト27に、船体22の外側でユニバーサルジョイント28を介して接続し、ユニバーサルジョイント28のドライブシャフト27との接続部28aを中心にしてスクリュー29の角度と深さを調整するスクリュー調整機構38を設ける。
(もっと読む)
無線操縦用送信機
走行玩具の走行方向を制御する制御信号を生成して送信する無線操縦用送信機において、上部が球面状に凹陥する軸受部を備える支持体と、前記支持体が内部中央の底面から突出する下側ケースと、前記支持体が貫通するよう中央に設けられる上側ケースの開口部と、前記ケース内部に前記支持体と垂直に配置される基板と、前記基板上に開口された基板開口部の周囲に実装固着される走行玩具の進行方向を決定するための複数のスイッチと、前記各スイッチ上に配置される複数の押圧部を保持すると共に下端部が前記軸受部に回動自在に収容される球面状の軸先部とを備える操作軸とを有する無線操縦用送信機を提供する。  (もっと読む)
(もっと読む)
リモコン二輪車のロール角制御装置
操縦者の操縦操作を容易にすることができ、広い速度域でリモコン二輪車の姿勢を安定させることができる、リモコン二輪車のロール角制御装置を提供するために、ロール角制御装置21を設けた。ロール角制御装置21は、車体本体のロール角を検出するロール角検出手段35と、操舵軸又はフロントフォークに左右方向の回転トルクを付加する操舵用アクチュエータ13と、ロール角検出値とリモコン受信機からのロール角目標値とに基づき操舵用アクチュエータに対する操作量を出力してロール角検出値をロール角目標値に近付けるように制御する制御手段29と、少なくとも中立点を境にして舵角が左右の何れに切れているかを検出する舵角検出手段50とを備え、前記制御手段29によって、舵角検出手段にて検出した舵角が右切れ方向の場合には右回転トルクを付加し、舵角検出手段にて検出した舵角が左切れ方向の場合には左回転トルクを付加するような信号を、操舵用アクチュエータに対する操作量に付加するように制御するキャスタ効果制御手段51を構成した。  (もっと読む)
(もっと読む)
羽、羽の製造方法、およびその羽を備えた移動装置

【課題】 CFRP等の質量が小さくかつ剛性が高い繊維複合材料を用いながら、所望の剛性分布が得られるような設計の自由度が高い構造からなる羽およびその製造方法を提供する。
【解決手段】 羽面部3は、繊維軸が第1の方向に延びる第1のCFRP層、第1の方向に対して60度ずれた第2の方向に繊維軸が延びる第2のCFRP層、および、第2の方向に対して60度ずれた第3の方向に繊維軸が延びる第3のCFRP層の積層構造からなる。第1のCFRP層においては、第1方向に沿って延びる複数の細長板状部7が互いに間隔をおいて並んでいる。第2のCFRP層においては、第2方向に沿って延びる複数の細長板状部8が互いに間隔をおいて並んでいる。第3のCFRP層においては、第3方向に沿って延びる複数の細長板状部9が互いに間隔をおいて並んでいる。
(もっと読む)
自動飛行制御システムおよび自動飛行制御方法
【課題】無人小型飛行体の飛行制御を容易かつ確実に行うと共に、無人小型飛行体の飛行範囲を拡大することができる自動飛行制御システムおよび自動飛行制御方法を提供する。
【解決手段】本発明の自動飛行制御システム10は、地上から撮影可能なマーカ300が付された無人小型飛行体1の制御システムであって、前記無人小型飛行体1に付されたマーカ300を地上から撮影する複数のカメラ装置302〜305、前記カメラ装置より前記マーカの撮影画像を取得し、該マーカの撮影画像の属性情報を抽出する属性抽出手段と、前記属性情報に基づき前記カメラ装置に対する前記無人小型飛行体の位置および姿勢の現在情報を算定する現在情報算定手段と、前記現在情報と、予め定めた飛行経路における位置および姿勢の基準情報との差異を特定し、該差異を解消する制御データを生成して無人小型飛行体に送信する制御データ送信手段とを備える。
(もっと読む)
飛行体
【課題】燃料電池を効果的に設置することができる飛行体を提供する。
【解決手段】飛行体1は、外面71に沿った気流を発生させるカウリング7と、電力を供給する燃料電池30とを備えている。カウリング7の少なくとも一部は、燃料電池30の一部を構成している。
(もっと読む)
ロボット
本発明は、例えば家の中など障害物がある環境で自由に動き回わるのに適した構造を有するロボットを提供することを目的とし、カメラで得られた画像を基地局に無線で送信することにより、その画像を、基地局を介して、その基地局との間で無線通信を行なう通信端末に送信するとともに、その通信端末の操作によりその画像上に指定された移動目標位置情報を基地局を介して無線で受信する通信部と、その通信部で得られた移動目標位置情報により特定される移動目標位置までロボットを移動させる動作制御部とを備えた。  (もっと読む)
(もっと読む)
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム
【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
自走式掃除機
【課題】遊び相手としての魅力のある高い付加価値を有する自走式掃除機を提供する。
【解決手段】遊戯制御手段は、音声出力手段が所定のタイミングで繰り返し発する所定の遊戯用メッセージの各回毎の終了後において、人体検知手段が移動する遊戯者を検知した場合には、音声出力手段に所定の捕獲成功メッセージを出力させ、撮像手段に同遊戯者を撮像させ、かつ同撮像にかかる画像を画像表示手段に表示させるとともに、予め設定した人数の遊戯者が検知された場合、或いは、上記遊戯用メッセージが発せられている間に本体に配設された所定の遊戯終了キーが押されたことを検知した場合に遊戯を終了させる。その結果、自走式掃除機は掃除機能に加え、自走機能を生かして所定の遊戯を行なうに際し人間の対戦相手としての遊び相手機能を発揮する。
(もっと読む)
洗濯機玩具
【課題】洗濯、乾燥が1台で可能なドラム型洗濯機を模しており、なおかつ注水や洗濯、乾燥、全自動等の使用感をリアルに現出できるような洗濯機玩具を提供することを課題とする。
【解決手段】本発明の洗濯機玩具は、扉の窓部に封入した液体をドラムと共に高速回転させ、また、各種ボタンを押した時には注水音、送風音、ドラムの高速回転音などの効果音をスピーカから発する機能を備えている。また、水を密閉部に封入しているので、子供が遊んでも周囲に水を飛散させる心配のない洗濯機玩具である。
(もっと読む)
21 - 30 / 30
[ Back to top ]