
Fターム[2C150ED13]の内容
Fターム[2C150ED13]の下位に属するFターム
方向制御用の車又は球体 (6)
部材を間欠的に突出 (1)
駆動トルクの変化によるもの (3)
車輪の回転差 (6)
動力源の回転方向切換 (6)
Fターム[2C150ED13]に分類される特許
1 - 20 / 22
ホイールアライメント用ミニチュア模型
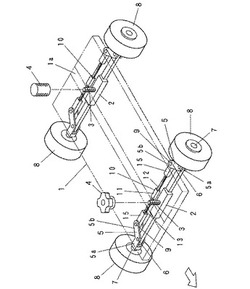
【課題】ホイールアライメントの内容や必要性をわかりやすく説明することが可能なミニチュア模型を簡単な構成で提供する。
【解決手段】 ミニチュア模型として持ち運び可能な大きさで形成された車体1と、車体1に支持され、かつ、車体1の幅方向に延びるホイール取付部材2と、平面略L字形をなし、その屈曲部で前記ホイール取付部材2の両端部に鉛直な枢軸6を介して回動自在に取り付けられた左右の回動アーム5と、前記左右の回動アーム5の車体1の外方向に延びる一方の片5aの外端に車軸7を介して回動可能に取り付けられたホイール8と、前記左右の回動アーム5の他方の片5bの先端部分同士を鉛直な枢軸9を介して互いに連結する伸縮軸10と、この伸縮軸10を伸縮操作する回動操作部11とからなる構成とする。
(もっと読む)
ラジコンシステム

【課題】ラジコン自動車の操縦をやさしくまた楽しくするために、前進走行の操縦と後進走行の操縦を同じ感覚で操縦できるようにすることで、狭い場所での機首方向変更をやさしくする。
【解決手段】操縦器または自動車は、操縦器からの走り信号が後進であることを検出したとき、操縦器からの操舵信号の左操舵と右操舵を反転して自動車に送るので、前進でも後進でも同じ感覚で操縦できるようになり、狭い場所での方向転換も操舵は一定のままで、走行レバーを前進と後進を繰り返させるだけで方向転換するようになる。
(もっと読む)
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
競走玩具
【課題】物足りなさや興趣性の欠如を解消して、従来よりも飽きることなく長く楽しめるようにすること。
【解決手段】自走するための駆動機構12を有する一または複数の第1の走行体1と、自走するための駆動機構を有し、第1の走行体と競走する一または複数の第2の走行体2とを備え、各走行体を自走させて速さの優劣を競う競走玩具100において、第1の走行体は、少なくとも前方及び後方に向けて、第2の走行体の走行を妨害する妨害信号を無線送信する妨害信号送信手段13,14を備え、第2の走行体は、妨害信号を受信する妨害信号受信手段15と、妨害信号受信手段から受信した妨害信号により自身の駆動機構の妨害動作を制御する妨害制御手段16と、を備える。
(もっと読む)
操舵機能付走行玩具
【課題】 簡単な構成で確実に転落や衝突による停止を防ぎ、動作も単調になりにくくした操舵機能付走行玩具を提供することにある。
【解決手段】 本体2には、上下に可動する支持体としてのアーム部材4が取り付けられている。アーム部材4には、転動方向が設定角度内で可変するように回動自在にキャスタ6が取り付けられている。キャスタ6の車輪6cは、キャスタ本体6aの回動中心から偏心した位置に配置されている。駆動輪8は、駆動部14により駆動される。駆動部14は、キャスタ6の車輪6cが接地してアーム部材4が上がっていると、前進するように駆動輪8を駆動し、車輪6cが脱落してアーム部材4が下がると、一定時間後退するように駆動輪8を駆動する。キャスタ6の車輪6cは、前進又は後退するときに、キャスタ6に回転力が作用し、転動方向が変わる。これにより、左右にも進行方向が変わることになる。
(もっと読む)
ヘリコプター玩具
【課題】 操縦が容易であって、且つ、スティックレバーで操縦する場合とは異なる嗜好を提供可能である音声によって操縦可能なヘリコプター玩具を提供する。
【解決手段】 本発明のヘリコプター玩具1は、送信機と、ヘリコプター形状の飛行体と、を備え、この飛行体は、充電式電池と、ロータと、ロータを回転駆動するモータと、受信回路を有した飛行体側制御回路とを備え、送信機は、操作者が発する音声指示を識別する音声識別手段107と、音声識別手段107によって識別された音声指示に対応して所定の操作信号を出力する信号生成手段109と、補助操作スイッチ59と、を備え、音声指示は、モータの回転始動を指示する第1の指示と、飛行体の上昇を指示する第2の指示と、飛行体の高度の維持を指示する第3の指示と、飛行体の下降を指示する第4の指示と、モータの回転の停止を指示する第5の指示と、を含む。
(もっと読む)
電子玩具及びその移動方法
【課題】本発明は、電子玩具及び移動方法に関する。
【解決手段】本発明に係る電子玩具は、一対のホイールと、前記一対のホイールを駆動することに用いられるモーターと、前記2つの角速度を検出し且つ前記一対のホイールの角速度の角速度差を計算する偏差検出モジュールと、前記偏差検出モジュールからの角速度差に基づいて、どのホイールが調整される必要があるか及びその調整量を示す調整信号を生成する調整モジュールと、前記調整モジュールからの調整信号に基づいて、パルス幅変調器で対応するモーターを駆動することにより、対応するホイールの角速度を調整する駆動モジュールと、を備える。又、本発明は、電子玩具の移動方法にも関する。
(もっと読む)
ラジオコントロール用送信機
【課題】
ラジオコントロール用送信機において、操作者の手首の負担を軽減し、長時間操作しても疲労感の少ない送信機に装着される傾斜アダプタを提供することを目的としている。
【解決手段】
傾斜アダプタ20は、本体部1の本体側取付部8に装着される第一取付面21と、この第一取付面21に対し傾斜した円形状の第二取付面22を有している。
また第一取付面21は凸部を構成しており、本体側取付部8の凹部8aと嵌合し、本体部1と傾斜アダプタ20は任意の回動位置で取付け可能である。同様に、第二取付面22はカラー23とで凹部を形成し、操作ユニット6の操作ユニット取付部が装着されかつ任意の回動位置で固定可能な構成である。
そのため、操作ユニット6を本体部1に対し傾斜した状態で取り付けることができる。
(もっと読む)
全方向性車両玩具並びにその車輪
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
(もっと読む)
揺動玩具及び揺動玩具の組立方法
【課題】興趣性に富んだ揺動玩具及び揺動玩具の組立方法を提供すること。
【解決手段】殻体の内部に、永久磁石が設けられた振り子と、前記振り子の永久磁石に磁力を作用させる電磁石と、前記電磁石を制御する電磁石制御手段とを備えた揺動玩具において、接地部分が移動可能に構成され、前記振り子の向きが変更できるように構成されるとともに、前記振り子の向きの変更に応じて、前記電磁石の取付位置を変更できるように構成し、前記殻体の揺動方向が変えられるようにした。
(もっと読む)
ラジオコントロールカーの操舵制御装置
【課題】 ポテンションメータを回転させる減速ギアを介してサーボモータのポテンションメータ軸を回転させると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
(もっと読む)
走行玩具用操舵制御装置及び走行玩具
【課題】自律的に前方の障害物との衝突を回避することのできる走行玩具用を提供する。
【解決手段】操舵装置20によって前輪2c,2cの向きを変える走行玩具1の操舵制御装置18であって、異なる波長の赤外線λ1,λ2を発する発光部11,12と、前記走行玩具1の前方斜め左右方向の障害物によって反射した赤外線λ1,λ2の反射光を受光する受光部13と、受光部13が受光した赤外線の波長に応じて前輪2c,2cの向きを所定の時間だけ前記障害物との衝突を回避する方向に変えるよう操舵装置20を制御するコイル通電制御部19とを備える。
(もっと読む)
模型用ラジオコントロール送信機
【課題】操縦者がアンテナの向きを意識することなく、無線による被操縦体の遠隔操縦における信頼性を確保することができる模型用ラジオコントロール送信機を提供すること。
【解決手段】模型用ラジオコントロール送信機10の筐体20における把手40の内部にポール状アンテナ50をそのアンテナ軸が筐体20の高さ方向に沿う中心線に対して直交又は任意の角度傾斜させた状態で配置する。
(もっと読む)
軌道走行玩具
【課題】自動的に1つのループ状軌道に複数列車を交互に走行させることができる軌道走行玩具を提供すること。
【解決手段】軌道の少なくとも一部を複線路化し、それらの各線路に、自走車両の停止手段をそれぞれ備え、一方の線路に侵入する自走車両によって、一方の線路の停止手段を作動させてその線路の自走車両を停止させるとともに、他方の線路の停止手段を作動させてその線路の自走車両への停止状態を解除することを特徴とする。
(もっと読む)
2足歩行ロボット
【課題】浮揚自在で、軽量化と構造の簡素化を実現した2足歩行ロボットを提供すること。
【解決手段】2つの股関節2a,2bに左右の脚部が装着され、該股関節2a,2bが接続部材1に接続されてなる2足歩行ロボット10であり、股関節2a,2bはロボットを進退させるべく左右の脚部を前後方向に回動させる駆動装置2a1,2b1を備え、左右の脚部の双方には、略平坦なルーバー8,8がその長手方向を脚部の長手方向に向けた姿勢で、一方の脚部における他方の脚部に対向する側面に装着されており、ダクテッドファン7が第2、第3の駆動装置91,92を介して、ファンの回転軸73を一方の脚部側から他方の脚部側へ回動自在に装着され、かつ、ファンからの吹き出し流れがルーバー8,8に直射されるようになっており、股関節の動作に応じたルーバー8,8の傾斜によって浮揚方向が調整される。
(もっと読む)
音波操縦走行車両玩具
【課題】 この発明は、作動が趣向に富み、幼児から児童まで遊ぶことが可能な、構成が簡単で廉価な玩具を提供にある。
【解決手段】 少なくとも操縦自走車両の単体を有する走行車両とホイッスル等の操縦音波発生器とから構成される音波操縦走行車両玩具において、前記操縦自走車両は、駆動モータと電池と前記操縦音波発生器の操縦音波を受信する操縦電子回路を装備し、操縦音波の受信毎に該操縦電子回路を動作し、電池と駆動モータをスイッチングし、駆動モータを、正転・停止・逆転・停止をワンサイクルとして作動して操縦自走車両を走行する音波操縦走行車両玩具。
(もっと読む)
移動機構の操縦制御装置
【課題】ジョイスティック等からの指令情報と、その指令情報に基づく動作との関係が、操作者にとって理解し易く、円滑な操縦が行なえ得る操作性の良い移動機構の操縦制御装置を提供することにある。
【解決手段】直進指令値と旋回指令値とを入力する指令値入力手段と、該直進指令値と該旋回指令値とに基づいて左右の駆動輪を制御する駆動輪駆動制御手段とを備え、該最大移動速度を直進用分と旋回用分に分け、該直進用分と該直進指令値とに基づく直進目標速度と、該旋回用分と該旋回指令値とに基づく旋回目標速度とを加算することで該駆動輪の目標速度とすることを特徴とする。
(もっと読む)
移動装置及び命令入力方法
【課題】本発明は、簡易な構成で命令を入力させる。
【解決手段】本発明は、楕円体状筐体2が移動してはいないと判別したとき命令入力モードと判断し、当該楕円体状筐体2が移動する際に第1及び第2の障害の検出用に楕円体状筐体2と移動面K1との距離を検出する距離検出部18により、楕円体状筐体2と命令入力用の外部物体との距離を検出し、当該検出した距離に応じて入力命令を判別して楕円体状筐体2を制御することにより、命令を入力するための操作キーを特には設けずに、楕円体状筐体2と移動面K1との距離の検出に用いる距離検出部18を兼用してユーザに対し命令を入力させることができ、かくして簡易な構成で命令を入力させることができる。
(もっと読む)
走行玩具セット
【目的】 ユーザーが自由に走行コースを描くことができると共に、描いたコースの消去、修正が可能な走行用支持体とラインセンサ式走行体とからなる走行玩具セットを提供する。
【構成】 低屈折率顔料をバインダー樹脂に分散状態に固着させた吸液状態と非吸液状態で透明性を異にする多孔質層を少なくとも一部に設けてなる走行面31を備えた走行用支持体3と、前記多孔質層上に液体を塗布することで発現する色相変化部34を検知する左右一対の反射型光センサ221,231と、該光センサが検知した入力信号を制御する制御回路24と、該制御回路からの出力信号により作動する左右一対のモータ25,26と、該モータにより駆動する走行手段28,29と、電源212とを備え、検知した連続的な色相変化部上を走行するラインセンサ式走行体2とからなる走行玩具セット1。
(もっと読む)
小型飛行装置
【課題】アクチュエータの負荷を軽減して羽ばたき飛行できるようにする。
【解決手段】胴体1の前部と後部の左右位置に、出力軸4にばね7による復元力を与えるようにしてなる翼駆動用モータ3を、上下方向角度変更可能に設ける。出力軸4に、駆動ロッド14と連結ロッド16と翼本体15からなる羽ばたき翼2a,2b,2c,2dを取り付ける。羽ばたき翼2a,2b,2c,2dを、翼駆動用モータ3と一緒に迎角の調整を行うと共に、羽ばたき翼2a,2b,2c,2dとその羽ばたき作動に同伴される空気並びに翼駆動用モータ3の可動部の慣性力と、ばね7の復元力が作る振動系の共振周波数で羽ばたき作動させるときの振幅を適宜調整することにより、発生させる後流の向きと強さを調整して、羽ばたき翼2a,2b,2c,2dごとに胴体1へ作用させる揚力と推進力のバランスを変化させて、ホバリングや前進飛行、左右旋回等を行わせる。
(もっと読む)
1 - 20 / 22
[ Back to top ]