
Fターム[2C150ED11]の内容
Fターム[2C150ED11]に分類される特許
1 - 20 / 29
コントローラ、模型装置、およびコントロール方法
【課題】模型装置がユーザの意図しないエリア内へと移動してしまう可能性を低減する。
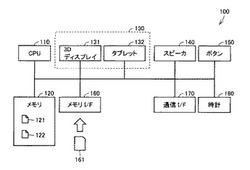
【解決手段】コントローラ100は、模型装置から模型装置の現在位置を受信するための通信インターフェイス170と、模型装置の移動許可エリアの指定を受け付けるための入力部132,150と、模型装置を移動させるための命令を受け付けて、模型装置の位置に基づいて命令によって模型装置が移動許可エリアから出るか否かを判断し、模型装置が移動許可エリアから出ない場合に通信インターフェイスを介して命令を模型装置に送信し、模型装置が移動許可エリアから出る場合に模型装置に命令を送信しないプロセッサ110とを備える。
(もっと読む)
教育教材用ロボット

【課題】逐次制御から自動制御に切り替わる際のロボットの動作自由度を確保できる教育教材用ロボットを提供する。
【解決手段】本発明の教育教材用ロボットは、電気的な制御信号による逐次制御および実行オブジェクトであるプログラムによる自動制御の少なくとも一方に基づいて動作するロボットと、ロボットに制御信号を与える制御装置と、制御装置とロボットとを接続すると共に制御信号を電気的にやり取りする制御ケーブルと、を備え、制御装置は、逐次制御から自動制御に切り替える切り替え信号を、ロボットに出力可能であり、制御ケーブルは、切り替え信号に基づいて、ロボットに対する拘束力を弱める。
(もっと読む)
回転翼無人機用のナビゲーション電子カード支持体
本支持体300は、機械的振動を吸収する材料によって形成される機械的インターフェース310を介して、無人機内に設けられているハウジング内に固定されるように設計されている。環状形状の機械的インターフェースは、ハウジング内に設けられている対応する環状肩部上にフィットするように設計されている。ハウジング内のホルダーの固定部301は、少なくとも1つの接続支柱302がナビゲーション電子カード320を支持しているとともに該固定部の一端に自由に取り付けられている状態で、機械的インターフェース310を支持する。無人機用の電源バッテリー400もホルダー内に収納される。ナビゲーション電子カードは特に、無人機の重心に位置決めされるように該カードに配置される、加速度計のようなナビゲーションセンサー321を含むことができる。 (もっと読む)
転動ロボット
【課題】構造の複雑化を抑制しつつ、常に全ての方向に転動させることができる転動ロボットを提供する。
【解決手段】立方体状の筐体2と、筐体2内に設けられたメインモータ10と、メインモータ10の回転軸の一端に固定されたフライホイール12と、回転軸に対して鋭角に交差する方向に沿って延在し、かつ筐体2に対してメインモータ10を旋回可能に支持する支持軸14,15と、メインモータ10を支持軸14,15周りに旋回駆動させるサブモータ13とを備え、支持軸14,15は、互いに隣接する任意の二面に投影させた形状がこの二面に平行な直線に対して傾斜した状態となるように設けられている。
(もっと読む)
転動ロボット
【課題】軽量かつ剛性が高い本体ケースを備える転動ロボットを提供するものである。
【解決手段】転動ロボット1は、回転軸を有するモータと、回転軸に取り付られた回転部材と、モータおよび回転部材を内包する略立方形状の本体ケースとを備える。本体ケース2は、金属より環状に形成され、互いに一体的に連結される複数のフレーム(52から57)により形成されるケースフレーム51と、樹脂より板状に形成され、各フレーム(52から57)間を覆う複数のプレート部材(62,63,64)から形成されるケースカバーと、を備える。
(もっと読む)
航空機模型用リモートコントローラ
【課題】ユーザーが簡単な操縦で操縦モードを変更させる航空機模型用のリモートコントローラを提供する。
【解決手段】本発明は航空機模型用リモートコントローラに関し、さらに、それぞれ第一方向と第二方向で把持し、前記第一方向はリモートコントローラの第一操縦モードに対応し、前記第二方向はリモートコントローラの第二操縦モードに対応し、それに第一方向と第二方向は逆になる本体と、モード選択信号を発送するように構成されたモード選択スイッチと、リモートコントローラの第一ジョイスティックと第二ジョイスティックで操縦する操縦信号を収集して、前記モード選択信号に応じて前記操縦信号を処理し、リモートコントローラを第一操縦モードと第二操縦モードの状態で動作させる信号収集ユニットとからなる航空機模型用リモートコントローラに関する。
(もっと読む)
全方向性車両玩具並びにその車輪
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
(もっと読む)
遊技機
【課題】転動ロボットの動作を利用して商品性の高い遊技機を提供する。
【解決手段】制御ユニットは、操作ボードの操作ボタンに入力された動作パターンに応じてメインモータ3の回転軸4を回転させ、メインモータ3の回転トルクの反力により筐体2を第1面2aが接地する接地状態から、第1面2aの一辺を回動中心Oとして筐体2を転動させることを特徴とする
(もっと読む)
モータの制御装置及びそれを備えた転動ロボット
【課題】筐体の着地時における衝撃を抑制することができるとともに、筐体の動作パターンを増加させることができるモータの制御装置及びそれを備えた転動ロボットを提供する。
【解決手段】演算装置は、メインモータの回転角度を検出する回転角度検出手段の検出結果に基づいて、メインモータの回転速度を算出する回転速度変換器を備え、操作量演算部50は、筐体の角速度を検出する角速度センサの検出結果に基づいて、筐体の傾斜角を算出する傾斜角算出手段53と、筐体の現在の傾斜角と、目標値設定部で設定された目標傾斜角との傾斜角偏差信号に基づいて、傾斜角偏差に応じた出力信号を算出する傾斜角設定手段54と、メインモータの現在の回転速度と、目標値設定部で設定された目標回転速度との回転速度偏差信号に基づいて、回転速度偏差に応じた回転速度設定手段56とを備えていることを特徴とする。
(もっと読む)
ヘリコプタのロータ
【課題】部品点数・部材量が少なく小型・軽量性に優れ、耐久性、性能維持性に優れたヘリコプタのロータを提供する。
【解決手段】回転翼10のピッチ動作とスタビライザ11の揺動動作とをリンクさせるリンク機構は、回転翼のピッチ軸から離れて回転翼に固定配置された第一当接子a1と、ピッチ軸から離れて回転翼に固定配置され、第一当接子とピッチ軸を基準に逆側の等距離に配設された第二当接子a2と、スタビライザの揺動軸から離れてスタビライザに固定配置された第三当接子a3と、揺動軸から離れてスタビライザに固定配置され、第三当接子と揺動軸を基準に逆側の等距離に配設された第四当接子a4とを有する。少なくとも飛行時に、第一当接子と第三当接子、第二当接子と第四当接子とがマスト軸方向の押圧力成分を有して当接し、滑動することにより、ピッチ動作と揺動動作とをリンクさせる。
(もっと読む)
移動ロボットシステム
【課題】ロボット移動時の存在物衝突の危険性を削減する。
【解決手段】本発明の移動ロボットシステムは、周囲の状況を測定するセンシング部、センシング部からのセンシングデータと環境地図とから位置姿勢データを推定する位置姿勢推定部、及び、推定した位置姿勢データと移動経路データとから求めた移動制御データに従って移動を制御するロボット移動部を有する移動ロボットと、移動ロボットが移動する、存在物を含む環境の幾何状況を示した環境地図を生成する環境地図生成部、環境地図の座標系に、移動ロボットが移動する移動経路データを作成する移動経路データ作成部、及び、移動ロボットに関するロボット構成情報と環境地図と移動経路データとから、制御誤差を含む移動ロボットの移動中に存在物に衝突する可能性を示す危険度パラメータを求める危険度パラメータ算出部を有するコンピュータとを設ける。
(もっと読む)
脚式移動ロボット
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
羽ばたき装置
【課題】機動力が高くかつホバリングすることができる羽部を備えた羽ばたき装置を提供する。
【解決手段】羽部1100は、その一端が根元部1130に接続され、長手方向に沿って延びる第一の稜線部または谷線部を有する前縁部1110と、羽部1100は、その一端が根元部1130に接続された枝部1120とを含んでいる。枝部1120は、根元部1130から所定の距離だけ離れた所定の位置から先端部側においては、第一の稜線部または谷線部から次第に離れるように延びる第二の稜線部または谷線部を有している。前縁部1110と枝部1120との間には板状部1140が張られている。
(もっと読む)
ラジコン模型の統合制御システム
【課題】ラジコン模型に搭載される電子制御機器の制御、動作、異常検出などの情報を連携して管理し、制御の実行を総合判断することで安全性を高め、かつ操縦性能を向上する。
【解決手段】受信機2からの操縦指令信号、センサ部20で検出された各種の検出信号、設定値格納部40Aに格納されている設定値、ID格納部40Cに格納されたバッテリー17、動力モータ7、操舵用サーボモータ8,9,10の識別データは統合制御装置50において、その統合制御部50Aで連携処理される。1つの制御値が単独で実行されることなく、他の関連する操縦指令信号のデータやセンサの検出データを参照して、安全で効果的な飛行制御を可能にする。
(もっと読む)
転動ロボット
【課題】多面体からなる外殻を有する転動ロボットにおいて、簡易な構成により転動のためのトルクを向上させる。
【解決手段】多面体からなるロボット本体ケース2内に、回転軸4にフライホイール5を取り付けたメインモータ3と、その回転軸に直交する方向に延在し、メインモータを回動自在に支持するモータ支持軸6,7と、そのモータ支持軸周りにメインモータを回動駆動するサブモータ8と、それらモータ3,8を制御する制御装置10とを備えた構成とし、制御装置により、フライホイールの回転中にメインモータを回動させて転動に必要なトルクを発生させるように制御する。
(もっと読む)
二重反転回転翼機
【課題】風の影響を受ける環境でも風に対抗しつつ水平移動したり、ホバリングしたりすることが容易な小型の二重反転回転翼機を提供する。
【解決手段】機尾側ダクト21a近傍のピッチングプロペラ42と、目標地点の空間座標を記憶する目標地点情報記憶部61と、GPS信号により現在地点を検出する現在地点検出部51と、機体を移動させようとする水平方向の目標方位および目標地点までの水平距離を算出する水平変位算出部52と、方位センサ38bと、現在方位が水平方向の目標方位に向くように制御するヨー角コマンドを発生するとともに、ピッチングプロペラの回転速度を目標地点までの水平距離に比例するように変化させて上部メインロータ22および下部メインロータ23による水平方向の推力を制御することにより機体の水平方向の位置を制御する水平位置コマンドを発生するロータ制御部55とを備える。
(もっと読む)
制御装置、対戦型ロボットシステム、及びロボット装置
【課題】 操作者によって操作されて対戦する複数のロボット装置の制御に関し、種々の工夫を行って趣向性を高めることが可能な制御装置を提供する。
【解決手段】 操作者によって操作されて対戦する複数のロボット装置3、5を制御する制御装置19は、複数のロボット装置3、5のいずれかが操作者によって操作されて攻撃動作が実行される前に、当該攻撃動作が実行されることにより他の対戦相手のロボット装置3、5が受ける物理的影響の度合いが予め定められた範囲内に収まるように、実行される攻撃動作を自動調整する自動調整部23を備える。
(もっと読む)
重心力利用の自動水平制御装置
【課題】水平制御盤の組み合わせで、左右、前後の全傾斜方向に対して水平制御を機能する重心力利用の自動制御装置を提供する。
[0010]
【解決手段】水平制御盤の外郭固定フレームには支持軸を突出して設け、さらに水平制御盤の正面の軸受板を内郭回動フレームに貼着して設け、軸受板には振り子板を固定し、振り子板先端を重力体として内郭回動フレームの回動運動に連動させ、又、水平制御盤は外郭フレームより外側方向に位置して重力体を機能させる構造とする。
(もっと読む)
ヘリコプタ
【課題】ヘリコプタを自動的に安定させるための単純で安価な解決法を提供する。
【解決手段】主回転翼部4は、ロータシャフト8とプロペラ翼12とを備える。補助回転翼部5は、ロータシャフト8に直交する向きに配置されたオシレーティングシャフトと、オシレーティングシャフト30を軸に揺動可能な羽根28を備える。機械的リンク31は、補助回転翼部5の揺動が主回転翼部4のプロペラ翼12の仰角を制御するように主回転翼部4と補助回転翼部5を連結する。尾部回転翼部6は、胴体2の長手方向に伸びたスイングシャフト21の周りに揺動可能なスイング22と、スイング22に支持された第2のロータシャフト17と、第2のロータシャフト17によって駆動される翼と、を備える。
(もっと読む)
ロボットの制御方法及び制御装置
【課題】ロボット全体の動作を容易に、また、高速で制御可能な、ロボットの制御方法及びその装置を提供する。
【解決手段】ロボット(50)が取り得る姿勢から複数の姿勢(As〜Cs)が選択され、この複数の姿勢(As〜Cs)それぞれを特定する変数の組(A〜C)が座標(51a〜51c)と関連づけられてなる2次元マップ(51)から、任意に座標を読み出す座標読み出しステップと、読み出された座標に対応した変数の組(A〜C)で特定される姿勢(As〜Cs)をとるようロボット(50)に対して指示するステップと、を有する。
(もっと読む)
1 - 20 / 29
[ Back to top ]