
Fターム[2C150ED37]の内容
Fターム[2C150ED37]に分類される特許
1 - 10 / 10
タイマー装置
【課題】間計測中にユーザーを楽しませることができるタイマー装置を提供する。
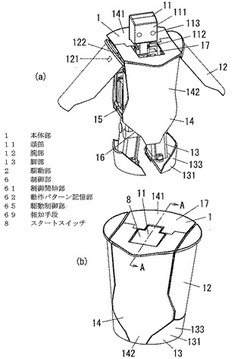
【解決手段】本発明は、スタートスイッチ8が押されてからの時間を計測するタイマー67と、タイマー67により測定された時間が所定の時間経過するとそのことを報知する報知手段69とを備えたタイマー装置である。頭部11及び腕部12及び脚部13を有する本体部1と、前記本体部1に設けられて頭部11及び腕部12及び脚部13を駆動させる駆動部2と、前記駆動部2を制御する制御部6とを備える。制御部6は、前記駆動部2の複数の動作パターンが記憶された動作パターン記憶部62と、前記複数の動作パターンのうちから選択された動作パターンに基づいて前記駆動部2を制御する駆動制御部65と、前記スタートスイッチ8が押されることで前記駆動制御部65の制御を開始させる制御開始部61とを有している。
(もっと読む)
ロボット装置及び動作制御方法

【課題】 表現の豊富化を可能にするとともに、遷移する際の姿勢や動作が最適化されたロボット装置及び動作制御方法を提供する。
【解決手段】 ロボット装置1は、コントローラ32により、現在の姿勢から目標とされる姿勢又は目標とされる動作までの経路を、行動指令情報S16に基づいて、姿勢及び動作が登録されて構成され、姿勢とこの姿勢を遷移させる動作とを結んで構成されたグラフ上において探索し、探索結果に基づいて動作させて、現在の姿勢から目標とされる姿勢又は目標とされる動作に遷移させることにより、ロボット装置1やコンピュータグラフィックスで動くキャラクターの表現の豊富化が可能になる。
(もっと読む)
脚車輪型移動ロボット
【課題】
車輪と脚の一部を接地させた待機姿勢から、上半身の重量バランスや上半身の傾斜角度制限にかかわらず、車輪のみを接地させた起立姿勢への安定した姿勢変化を行う。
【解決手段】
2本の複数の関節を備えた脚と、各々の脚先に駆動車輪と、脚と車輪の動作を制御する制御手段を備える脚車輪型移動ロボットにおいて、待機姿勢から車輪を滑らせることによりZMPを両脚の車輪を結んだ軸上に移動させ、その後脚を伸展しながら脚を揃えることにより待機姿勢から起立姿勢に安定した姿勢変化を行うように制御する。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
弦楽器用マニピュレータ、及び弦楽器演奏ロボット
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器用マニピュレータは、弦51を指板52に押し当てる押し当て部材21と、押し当て部材21を保持する本体部20と、本体部20を指板52に対して近接離間させる左手用アクチュエータ13と、押し当て部材21を本体部20に対して回動可能に支持するシャフト22と、本体部20と押し当て部材21との間に設けられ、押し当て部材21を指板52に押し付ける方向に付勢するねじりばね26と、を備え、左手用アクチュエータ13が指板52を本体部20に対して近接離間させることによって、押し当て部材21が回動して弦方向の押し当て位置が変化するものである。
(もっと読む)
動作含みのマルチメディアコンテンツの再生が可能なオーディオ装置互換のロボット端末機(AudioDeviceCompatibleRobotTerminalCapableofPlayingMultimediaContentsFileHavingMotionData)
【課題】PCで音楽ファイル伝送時に広く使用するWAVEファイルを用いて、PCがロボット端末機用動作含みのマルチメディア・データを受信して該PCに連結されたオーディオ装置互換のロボット端末機が該動作含みのマルチメディア・データを再生するようにする。
【解決手段】本発明は、オーディオ装置互換のロボット端末機において、
オーディオ伝送可能ファイルのオーディオ・チャンネルに乗せられて送った、動作制御データを含むデータを受信する受信装置;前記受信したデータで動作制御データを抽出する抽出装置;前記抽出された動作制御データを受信して関連動作駆動を行なう駆動装置を含むことを特徴とする。
(もっと読む)
動作プログラムの入力が簡単なダンス人形
【課題】曲のイメージにあったダンスを簡単にプログラムすることができるダンス人形。
【解決手段】前記課題を解決するため、本発明に係るダンス人形は、以下の要件を備えることを特徴とする。
イ)駆動用モーター1個に対応する1個の入力スイッチを持ち、押すごとに駆動モーターを「A押して正転→B離して停止→C押して逆転→D離して停止」を繰り返す制御回路を持つこと。ロ)上記AからDまでの入力動作サイクルを予め設定された複数回数nを行い、その複数回数nの入力動作サイクルすべてのAからD個々の測定時間を時系列に記憶させる制御回路を持つこと。ハ)上記入力動作が終了後にその記憶させた動作パターンにおいて駆動モーターを繰り返して駆動させる制御回路を持つこと。
(もっと読む)
発光装置及び方法
【課題】 透光性を有するケースに納められた複数個の発光部に全体として独特で興趣ある発光を行なわせることが出来るようにする。
【解決手段】 この発明では発光部とスイッチとの新しい組み合わせ構造によって興趣ある発光方法を実現する。即ちスイッチと、透光性を有するケースに納められた複数個のLEDや電球などの発光部と、前記スイッチがON状態に成った時に前記発光部を所定の順序で点灯させる制御回路と、これ等に電力を供給する電源部とから成る発光装置に於いて、前記スイッチを複数個備えており、複数個の発光部の各々に対応する位置に前記スイッチが設けられていることを特徴とする発光装置とした。
(もっと読む)
ロボット
【課題】 ワイヤ駆動方式のロボットにおいて、ワイヤを進退させるアクチュエータの動作量に、関節角の偏差を適切に加味するための技術を提供する。
【解決手段】 ロボットは、胴体側部材と、胴体側部材に回転可能に接続されている末端側部材と、末端側部材に接続されている第1、第2ワイヤと、第1、第2ワイヤを進退させる第1、第2アクチュエータと、指示角を指示角と実際角の偏差によって修正した第1修正指示角から第1アクチュエータの動作量を計算する第1コントローラと、指示角を指示角と実際角の偏差によって修正した第2修正指示角から第2アクチュエータの動作量を計算する第2コントローラと、末端側部材の回転角を指示角に維持するために必要なトルクの大きさに応じて、第1コントローラおよび/または第2コントローラで用いる指示角の修正量を調節する調節手段とを備える。
(もっと読む)
人間型ロボットの制御装置
【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
1 - 10 / 10
[ Back to top ]