
Fターム[2C480CB02]の内容
プリンタの字間スペース及びラインスペース (4,828) | 構成 (1,267) | 電磁的駆動源を持つもの(フリ) (421) | モータ (417)
Fターム[2C480CB02]の下位に属するFターム
Fターム[2C480CB02]に分類される特許
1 - 20 / 351
画像形成装置
記録装置
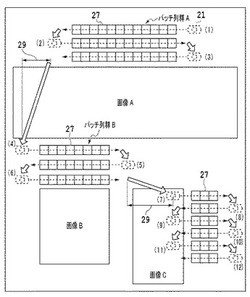
【課題】記録装置において、測色センサを搭載したキャリッジを記録媒体搬送によって相対に移動するために記録媒体を押圧する押圧板を離間させる構成において、キャリッジの移動に関してさらなる測色スループットの向上を図ることを可能とする。
【解決手段】測色CR21による測色走査後、測色ユニット24が記録媒体から離間する間に、走査後の測色CR21の位置から、次の走査対象であるパッチ列の端部のうち、距離が短い方の端部(2)の待機位置へ測色CR21を移動させる。以下、同様に測色走査と短い方の端部の待機位置への移動を繰り返すことにより、押圧板の離間及び押圧の間に、位置(1)〜(3)へと順に待機位置を変えパッチ列間の測色CR21の待機移動距離を最短にすることができる。
(もっと読む)
記録装置

【課題】キャリッジの駆動速度によらずトルクリップの発生を抑制する。
【解決手段】本発明の記録装置は、記録ヘッド3を搭載するキャリッジ2と、キャリッジ2を走査方向に駆動するモータ7と、キャリッジ2の位置を検出し、検出結果を示す位置信号を出力する位置検出部61と、キャリッジ2の駆動速度を検出し、検出結果を示す速度信号を出力する速度検出部62と、位置信号に示されるキャリッジ2の位置に応じて周期信号を生成して出力する周期信号生成部65と、周期信号生成部65より出力された周期信号を、速度信号に示されるキャリッジ2の駆動速度に応じて変調して出力する周期信号変調部66と、キャリッジ2の駆動を制御する制御信号に周期信号変調部66の出力信号を合成した信号に基づき、モータ7にキャリッジ3を駆動させる駆動回路54と、を備える。
(もっと読む)
角度検出装置、モータ駆動装置及び画像形成装置
【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
(もっと読む)
記録装置、制御装置及び制御方法
【課題】長期間に渡ってモータのトルクリップルの影響を効果的に抑制すること。
【解決手段】本発明の記録装置は、駆動源としてモータを備え、キャリッジを移動する駆動手段と、前記キャリッジの位置を検出する検出手段と、前記モータを制御する制御データを生成する生成手段と、前記モータのトルクリップルを打ち消すために、前記制御データを前記トルクリップルと同周期で変化する補正データで補正する補正手段と、前記キャリッジの位置に対する前記補正データの位相を更新する更新手段と、前記検出手段の検出結果に基づいて、前記キャリッジの速度変動量を演算する演算手段と、を備え、前記更新手段は、複数種類の前記位相を順次仮設定し、前記演算手段によって、仮設定した位相毎に演算された前記速度変動量に基づいて、前記速度変動量が小さくなるように前記位相を更新することを特徴とする。
(もっと読む)
記録装置
【課題】 キャリッジへの駆動伝達を高精度なベルトを用いる場合のキャリッジ動作時において、DCモータの制御によって歯付きベルトの歯飛び現象を防止したインクジェット記録装置を提供すること。
【解決手段】 記録ヘッドを搭載するキャリッジをアイドラプーリとで張架されたベルトを介して駆動するDCモータと、前記アイドラプーリを付勢する弾性部材とで構成され、エンコーダを用いて前記DCモータのサーボ制御により前記キャリッジを駆動する記録装置において、前記DCモータの複数の駆動プロファイルの中から1つを選らんでキャリッジを駆動する制御手段と、前記駆動プロファイルはそれぞれに前記PWM値の上限値を複数備え、
前記キャリッジの動き出す際の第一の駆動および第二の駆動とを設け、第二の駆動時のPWM上限値を第一の駆動時のPWM上限値より低くしたインクジェット記録装置を提供すること。
(もっと読む)
画像形成装置
【課題】モータや電磁クラッチを設けずに、簡単な構成で搬送ベルトのテンションの緩和状態と緊張状態を、ユーザの手を煩わすことなく自動的に切り替えられるようにする。
【解決手段】搬送ベルト24の表面に吸着されて副走査方向(Y方向)へ搬送される記録用紙Pに、キャリッジ20によって主走査方向(X方向)に往復移動される記録ヘッド22からインク滴を吐出させて画像を形成するインクジェット方式の画像形成装置であり、そのキャリッジ20が主走査方向における搬送ベルト24の外部の右側維持回復機構50上の所定位置へ移動したときに、そのキャリッジ20の移動による力によって、テンションローラ26を搬送ベルト24のテンションを緩和させる方向に移動させるテンション緩和用伝動機構10を設けた。
(もっと読む)
記録装置、及び搬送ローラの回転量と回転位置の特定方法
【課題】1つのエンコーダセンサで、搬送ローラ等の回転体の回転位置を特定し、かつ搬送ローラ1周にわたって一定の分解能で回転量を特定する。
【解決手段】搬送ローラの回転軸を中心とした円周部に沿って、所定の波長域の光を透過する透過部と、光を遮断する遮光部とが所定のピッチで交互に複数配置されたパターン部を備え、複数の透過部のうち1つの透過部は、他の全ての透過部と異なる光の透過率を有し、搬送ローラを回転させる工程と、パターン部へ光を発光させる工程と、複数の透過部を透過した光を受光して電圧に変換する工程と、搬送ローラの回転に伴って変化する電圧に基づいて、搬送ローラの回転量及び回転位置を特定する工程とを備え、特定する工程は、ピッチと搬送ローラの回転速度とに従う電圧の変化に基づいて回転量を特定し、1つの透過部に対応して得られる電圧値に基づいて基準位置を特定し、基準位置と回転量から回転位置を特定する。
(もっと読む)
インクジェット記録装置及び方法
【課題】吐出トリガ信号の時間軸変動を低減し、描画品質を向上させる。
【解決手段】
記録媒体に対してインクジェットヘッドを往復移動させるインクジェット記録装置において、ヘッド走査手段によるインクジェトヘッドの位置を検知するリニアエンコーダ(70)の出力信号を基にインクジェットヘッドの吐出タイミングを0.1μs単位オーダーの時間分解能で規定する吐出トリガ信号を生成する吐出トリガ生成手段(90)を備える。例えば、エンコーダ信号のエッジタイミングから得られるタイミング信号の周期をカウントし、そのカウント値に対して移動平均化処理を行い、カウント値の持つジッタ成分を低減して吐出トリガ信号を生成する。或いはまた、カウント値に対して逐次演算型のデジタルローパスフィルタを通過させる。さらに、ヘッドに入力させる吐出トリガ周期はヘッド共振周期の整数倍だけずれた長さに設定しておくことが好ましい。
(もっと読む)
モータ制御装置及び画像形成システム
【課題】駆動対象の速度を高精度に制御する。
【解決手段】モータ制御ユニットは、エンコーダを用いて計測された駆動対象の速度Vがゼロより大きくなることで、駆動対象10の変位を検知するまでは、操作量Uを漸次増加させ(S140)、駆動対象10の変位を検知した後、駆動対象の加速度Aが高い期間は、操作量Uを漸次減少させる(S160)。そして、駆動対象の加速度Aが所定条件を満足すると(S150でYes)、フィードバック制御を開始し、目標速度Vrと駆動対象10の速度Vとの偏差に基づき、操作量Uを算出する(S190)。この際、目標速度Vrの軌跡は、フィードバック制御開始時点での目標速度Vrが、その時点での駆動対象の速度Vと一致し、この時点での目標速度Vrの一階時間微分である目標加速度Arが、この時点での駆動対象の加速度Aに略一致する軌跡に設定される。
(もっと読む)
記録装置及び記録装置おけるモータの駆動制御方法
【課題】ユーザの指示に対して、適切な搬送制御及びキャリッジの駆動制御を行う。
【解決手段】外部装置からインターフェースを介して受信したユーザの指示に基づいて記録速度を指定し、搬送モータが駆動を開始してから、記録媒体を所定の搬送量だけ搬送し、搬送ローラが停止するまでの搬送時間を測定し、キャリッジモータの駆動を開始してから記録ヘッドが記録領域に達するまでの空走時間を測定し、測定された搬送時間と指定された記録速度とに基づいて次に行われる搬送における搬送時間を推定し、測定された空走時間に基づいて次に行われるキャリッジの駆動における空走時間を推定し、推定された搬送時間をRTLF、推定された空走時間をRTCRとして、搬送を開始してから、RTLF−RTCRとなる時間が経過したらキャリッジモータが駆動を開始する。
(もっと読む)
記録装置及び記録制御方法
【課題】装置サイズの大型化を招くことなく、外力を受けるキャリッジの加速に伴う振動の影響を低減させ、高品位な記録を行うインクジェット記録装置を提供する。
【解決手段】キャリッジの加速終了後の定速への移行位置を、キャリッジの駆動重量(kg)×0.2(N/kg)以上の外力を受ける区間の区間外に設定する。
(もっと読む)
インクジェット記録装置
【課題】 インクジェット記録装置自体が大型化しても、プラテンギャップの変化量を抑制する。
【解決手段】 インクジェット記録装置は、プラテン上に支持された記録媒体に対してインクを吐出する記録ヘッドと、記録ヘッドを搭載したキャリッジと、記録媒体の搬送方向に直交する走査方向に沿って延在し、プラテン上でキャリッジを走査方向に案内する一対のガイドレールと、を備えている。一対のガイドレールのうち、一方のガイドレールはキャリッジにおける搬送方向の上流側の端部を支持し、他方のガイドレールはキャリッジにおける搬送方向の下流側の端部を支持している。
(もっと読む)
モータ駆動装置及び記録装置
【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
記録装置
【課題】エンコーダ信号の不安定な状態に影響されずにエンコーダカウンタのリセット動作を安定的に行う記録装置を提供する。
【解決手段】記録装置は、記録ヘッドの移動に伴い、第1のパルス信号と、第1のパルス信号と位相が異なる第2のパルス信号を生成する。また、記録装置は、第1のパルス信号と第2のパルス信号のパルス数をカウントするカウント部を各々有し、第1のパルス信号と第2のパルス信号に基づいて記録ヘッドの駆動を制御する複数の制御部を有する。カウント部のカウント値を所定の値に設定する間、第1のパルス信号と第2のパルス信号の複数の制御部への供給を停止させる。
(もっと読む)
印刷装置
【課題】主走査方向に移動する吐出ヘッドを備えるものにおいて、装置本体をより小型化する。
【解決手段】主走査方向の幅がヘッドキャリッジ23よりも広いインクキャリッジ33が、ヘッドキャリッジ移動機構によるヘッドキャリッジ23の移動に連動して移動すると共にヘッドキャリッジ23に対して主走査方向への位置ずれが可能に構成されている。このため、ヘッドキャリッジ23とインクキャリッジ33とを別々に移動させるものとしてもインクキャリッジ33用の移動機構の設置スペースを設ける必要がなく、また、ヘッドキャリッジ23の移動端でインクキャリッジ33を主走査方向に位置ずれさせることにより比較形態に比してインクキャリッジ33の移動範囲を位置ずれ分少なくすることができる。この結果、インクジェットプリンター20をより小型化することができる。
(もっと読む)
画像形成装置及び記録媒体
【課題】切断手段とキャリッジとが、省スペースの配置により干渉領域を有していても衝突して破損することがなく、装置の小型化と高い生産性とを実現可能な画像形成装置、記録媒体を提供する。
【解決手段】 ロール紙16と、記録ヘッドを搭載するキャリッジ11と、切断手段12とを備えた画像形成装置において、キャリッジ移動領域内の異物を接触により検知する検知手段と、キャリッジ11及び切断手段12の動作を制御する制御手段とをさらに備え、キャリッジ移動領域21と切断手段移動領域22とが重複する干渉領域23を有し、前記制御手段は、電源投入後の初期動作において、キャリッジ11の位置を初期化するキャリッジ初期動作と切断手段12の位置を初期化する切断手段初期動作とを排他的に行わせる画像形成装置、及び前記キャリッジ初期動作及び前記切断手段初期動作を実行させるプログラムを記録した記録媒体である。
(もっと読む)
記録装置及びその処理方法
【課題】エンコーダの読み取り結果に異常が発生した場合に、記録ヘッドの二次故障の発生を回避できるようにした技術を提供する。
【解決手段】記録装置は、キャリッジを駆動させるモータへ電圧を印加してキャリッジを所定方向に移動させる駆動制御手段11と、モータを駆動制御している間、キャリッジの所定方向に沿った位置及び移動速度を検出するために設けられたリニアスケールを、キャリッジに設けられたエンコーダ読み取り結果の異常を検出する異常検出手段12と、異常が検出された場合、モータに定電圧を印加してキャリッジをホームポジションに移動させるホームポジション駆動制御手段13と、ホームポジション駆動制御手段によるモータへの電圧の印加が開始された時点から所定時間内に、ホームポジションへキャリッジが戻っていない場合、モータへの電圧の印加を停止するとともにユーザに異常を通知するよう制御する異常制御手段15とを具備する。
(もっと読む)
画像形成装置
【課題】記録ヘッドのノズル面を垂直方向に配設した水平打ちではキャリッジのピッチングが生じて画像品質が低減する。
【解決手段】主ガイド部材21は、2つの斜面211Aと211Bの各延長線が交わる交点P1が、キャリッジ23の2つの斜面211A、211Bにそれぞれ接触する各接触部232A、232Bとを結ぶ線分の中点P2よりも高さ方向で上方に位置し、2つの斜面211Aと211Bの各延長線が交わる交点P1と、キャリッジ23の2つの斜面211A、211Bにそれぞれ接触する各接触部232A、232Bとを結ぶ線分の中点P2とを通る線Lが、ノズル面124に沿う方向の線Lnと斜めに交差する状態で配置されている。
(もっと読む)
搬送装置及び画像形成装置
【課題】ベルトを通じて搬送されるキャリッジの位置や速度を、ロータリエンコーダを用いて高精度に特定する。
【解決手段】ベルト36が、モータM3により回転駆動される駆動プーリ33及び従動プーリ34の周囲に巻回され、キャリッジ31がベルト36に連結された画像形成装置では、モータM3が駆動プーリ33を回転駆動することにより、ベルト36が回転し、これに従動してキャリッジが主走査方向に移動する。本装置では、従動プーリ34の回転軸に取り付けられたロータリエンコーダE3からの入力信号に基づきキャリッジの位置や速度を特定する際、ベルト36の撓みの影響を受けて誤差が生じうる。そこで、画像形成装置に対しては、キャリッジの加速エリア、定速エリア及び減速エリア毎、並びに、搬送方向毎に補正係数Kを定義し、搬送状態に応じた補正係数Kを用いてキャリッジの位置及び速度を補正することで、撓みによる誤差を抑える。
(もっと読む)
1 - 20 / 351
[ Back to top ]