
Fターム[2D003BB11]の内容
Fターム[2D003BB11]に分類される特許
1 - 20 / 47
作業機の干渉防止装置
【課題】作業機のキャブとアタッチメントが接近したときに干渉しないように、アタッチメントを動かすアクチュエータの作動速度を制限し減速させる干渉防止装置において、制限を解除するスイッチをONにしたときに作動速度の上限値を自由に設定できるようにする。
【解決手段】アクチュエータの作動速度を、アタッチメントとキャブの間に設定した減速開始線と停止線との間の減速域で上限値を制限するコントローラと、コントローラによるアクチュエータの減速制限を解除する制限解除スイッチを備え、制限解除スイッチは、その操作量に応じた信号をコントローラに出力する比例出力スイッチであり、コントローラは、この出力信号に応じて制限解除時のアクチュエータの作動速度の上限値を設定する。
(もっと読む)
立入禁止区域を有する埋設された公共施設のデータ

【課題】作業機の場所を特定し、かかる場所を報告された地下の公共施設の場所と比較する作業機で使用するためのシステムを提供する。
【解決手段】本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。
(もっと読む)
無人走行車両の走行禁止領域設定システム及び無人走行車両の走行禁止領域設定用コンピュータプログラム
【課題】電源から機器へ電力を供給するケーブルを車両が踏まないようにするために、車両の走行を禁止する領域を設定するにあたって、車両が走行可能な領域を大きくすること。
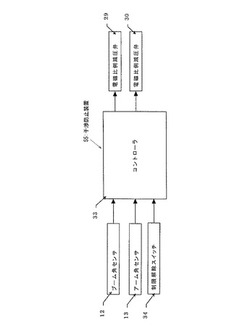
【解決手段】管理装置10は、例えば、鉱山の採掘場を走行する車両の走行を禁止する走行禁止領域を設定する。管理装置10は、ケーブル位置推定部12Aと、禁止領域設定部12Bとを含む。ケーブル位置推定部12Aは、電源からケーブルを介して電力の供給を受ける電気式作業機械と前記ケーブルを支持する支持体との間における少なくとも二箇所の位置情報と、前記電気式作業機械と前記支持体との間のケーブルの長さと、前記電気式作業機械の位置に関する情報とに少なくとも基づいて、前記ケーブルの位置を推定する。禁止領域設定部12Bは、前記ケーブル位置推定部12Aが推定した前記ケーブルの位置に基づいて、車両の走行を禁止する走行禁止領域として設定する。
(もっと読む)
掘削機械の表示システム及びその制御方法。
【課題】本発明の課題は、案内画面に表示される表示対象面と掘削機械との位置関係を容易に把握することができる掘削機械の表示システム及びその制御方法を提供することにある。
【解決手段】掘削機械の表示システムでは、上部境界線Laの位置と下部境界線Lbの位置とが算出される。上部境界線Laは、表示対象面78の断面の上端の高さ位置を示す。下部境界線Lbは、表示対象面78の断面の下端の高さ位置を示す。掘削機械の現在位置Poと、上部境界線Laあるいは下部境界線Lbとの上下方向の位置関係によって、表示範囲の基準点Pbが設定される。
(もっと読む)
自走式作業機械の制御装置
【課題】 自走式作業機械の走行体と旋回体を停止した後その停止状態を解除しても不都合を生じさせない制御装置を提供する。
【解決手段】 給電ケーブルの張力が第1閾値を超えた時に下部走行体の走行方向が検出されていないときは、走行が禁止される(STEP4、5)。給電ケーブルの張力が第1閾値を超えたときに下部走行体の走行方向が検出されている場合には、走行方向への走行が停止かつ禁止され、下部走行体の反対方向の走行が許容される(STEP6〜8、STEP12〜14)。上部旋回体についても下部走行体と同様に、上部旋回体の旋回方向が検出されていないときは旋回が禁止され(STEP16、17)、上部旋回体の旋回方向が検出されている場合には、旋回方向への旋回が停止かつ禁止され、上部旋回体の反対方向の旋回が許容される(STEP18〜20)。
(もっと読む)
油圧ショベルの作業可能範囲表示装置とその制御方法
【課題】本発明の課題は、車両本体の姿勢が傾いていても適切な作業可能範囲を表示することができる油圧ショベルの作業可能範囲表示装置を提供することにある。
【解決手段】油圧ショベルの作業可能範囲表示装置において、演算部は、到達可能範囲から車両下部領域を除いた作業可能範囲を算出する。到達可能範囲は、作業機が届くことができる範囲を示す。車両下部領域は、車両本体の下方に位置する領域である。表示部は、作業可能範囲を表示する。演算部は、車両本体の傾きに応じて作業可能範囲と車両下部領域との境界線を設定する。
(もっと読む)
建設機械
【課題】架線切断事故が起き難い建設機械を提供することである。
【解決手段】ブーム及びブーム先端側に設けられた作業用具を具備する建設機械において、前記ブームの水平方向に対する傾斜角を検出できる傾斜センサと、前記傾斜センサによる前記ブームの傾斜角が設定値に至った場合、そのことを報知する報知手段とを具備してなる。
(もっと読む)
作業機の干渉防止装置
【課題】昇降キャブと多関節の作業アームを備える作業機における、干渉防止装置の制御演算を簡単にする。
【解決手段】キャブ最下位置と最上位置とによって予め設定した制限域である、円弧状制限域(LMN)または直線状制限域(PQHIMN)をもとに作業アームの動きを制限する。
(もっと読む)
作業機械の作業範囲制御装置
【課題】作業機械の作業範囲制御装置に関し、フロント装置での作業時において安定性を向上させつつ作業性を向上させる。
【解決手段】下部走行体に対する上部旋回体の旋回姿勢を検出する旋回姿勢検出手段11L,11Rを設ける。また、フロント装置の作業範囲としての側方作業範囲を記憶する第一記憶手段32と、フロント装置の作業範囲として作業機械の機体中心から外端までの水平距離が該側方作業範囲よりも大きく設定された前方作業範囲を記憶する第二記憶手段33とを設ける。
さらに、フロント装置の作業範囲を制限する制御手段37を設け、該旋回姿勢が側方姿勢である場合に作業範囲を該側方作業範囲の内側に制限する。一方、該旋回姿勢が前方姿勢である場合に作業範囲を該前方作業範囲の内側まで拡大する。
(もっと読む)
掘削機
【課題】ブームの可動角度を制限しつつ、ブームを緩やかに停止させることができる掘削機を提供する。
【解決手段】機械本体101に対するブーム120のブーム角度αを検出し、ブーム用シリンダー130aにおけるブーム上昇側油室131への作動油の供給によりブーム120が上昇してブーム角度αが予め設定した機械本体101に対するブーム120の設定ブーム角度α0に達する場合にはブーム上昇側油室131への作動油の供給を停止させる掘削機100において、ブーム角度αと設定ブーム角度α0との差分値Δαの減少に伴って、ブーム上昇側油室131への作動油の供給量の減少割合を大きくする。
(もっと読む)
掘削機
【課題】ブーム及びアームの高さ制限を行う掘削機であって、ブーム及びアームを緩やかに停止させることができる掘削機を提供する。
【解決手段】掘削機100は、ブーム高さha及び設定上限高さh0に基づいて機械本体101に対するブーム120の目標ブーム角度α0を算出し、ブーム角度αと目標ブーム角度α0との差分値Δαの減少に伴って、ブーム上昇側油室131への作動油の供給量の減少割合を大きくし、アーム高さhb及び設定上限高さh0に基づいてブーム120に対するアーム140の目標アーム角度β0を算出し、アーム角度βと目標アーム角度β0との差分値Δβの減少に伴って、アーム上昇側油室151への作動油の供給量の減少割合を大きくする。
(もっと読む)
高さ調節可能なリフト装置を備えた貨物運搬車
【課題】高さ調節可能なリフト装置を備えた貨物運搬車における転倒危険をさらに低減させることである。
【解決手段】貨物運搬車は、貨物を受け取るための高さ調節可能なリフト装置と、さらに少なくとも1つの運動方向の加速度を測定するための加速度センサ装置と、受け取られた貨物重量を決定するためのセンサと、前記リフト装置のリフト高さを決定するためのセンサと、を備えている。制御/操作装置内において、走行状態を調節する少なくとも1つの車両内装置を設定するための操作信号が発生可能である。加速度センサ装置はリフト装置上に配置されている。
(もっと読む)
作業機械の旋回制御装置
【課題】作業機械の旋回制御装置に関し、簡素な構成で、旋回角度を正確に把握して旋回範囲を適切に制限し、旋回動作に対する追従性を向上させる。
【解決手段】上部旋回体の旋回速度を設定する旋回操作レバー1と、固定子4bに対し回転子4aを回転させて該上部旋回体を旋回駆動する電動モータ4と、回転子4aの角速度をモータ角速度として検出する角速度検出手段5と、該モータ角速度が旋回操作レバー1で設定された該旋回速度に対応する大きさとなるように、電動モータ4の回転速度を制御する電動モータ制御手段13と、該モータ角速度の時間積分値に基づき該上部旋回体の旋回角度を算出する旋回角度算出手段15と、該上部旋回体の旋回範囲を設定する旋回範囲設定手段16と、該旋回角度が該旋回範囲を超えないように電動モータ4の作動を停止させる停止制御手段17と、を備える。
(もっと読む)
建設機械
【課題】従来から知られている建設機械では、燃費向上など効率的な運転操作を行うための報知技術に着目しており、作業中にオペレータが行った運転操作の内容に基づいて何らかの制御を変更するものではなかった。
【解決手段】オペレータの疲労度Hを算出する演算式としてH=Ws×Ts十Wr×Tr十Wk×Tkを用いる。ここで、Ws・Wr・Wkはオペレータが旋回・走行・掘削操作をしたとき、単位時間内における作業負荷を表す重み係数である。Ts・Tr・Tkは旋回時間・走行時間・掘削時間の総和である。算出された疲労度Hが所定の閾値を超えたとき(S16)には、運転支援システムを疲労処理モード(S18)に変更する。
(もっと読む)
建設機械の干渉防止装置
【課題】作業具の回動角を検出する角度センサ等が故障した場合であっても、作業具と運転室との干渉を防止しつつ、作業が継続可能となる建設機械の干渉防止装置を提供する。
【解決手段】故障検出手段34により、作業具の回動角を検出する作業具角度センサ22の出力を監視して故障を検出する。故障検出手段34が角度センサ22の故障を検出することにより、第1の干渉防止制御手段43による干渉防止制御を、第2の干渉防止制御手段46による干渉防止制御に切り換える。第1の干渉防止制御手段43は、多関節フロントの関節部の回動角のみならず、作業具の回動角を参照した干渉防止制御を行なう。第2の干渉防止制御手段46は作業具の回動角を参照しない干渉防止制御を行なう。
(もっと読む)
作業アームの位置制御装置を備えた移動作業機械および移動作業機械の作業アームを位置制御する方法
本発明は作業アーム(6)の位置制御装置を備えた移動作業機械(1)に関する。本発明による移動作業機械(1)は、第1端が関節により前記作業機械(1)の上部旋回体(3)取り付けられた作業アーム(6)と、作業アーム(6)の第2端に取り付けられたツール(9)とを有している。上部旋回体(3)には少なくとも1つの傾きセンサが取り付けられており、作業アーム(6)には少なくとも1つの別の傾きセンサが取り付けられており、作業アーム(6)にはさらに少なくとも1つの回転速度センサが取り付けられている。移動作業機械(1)はさらに、前記少なくとも1つの傾きセンサの信号、前記少なくとも1つの別の傾きセンサの信号および前記少なくとも1つの回転速度センサの信号を処理するための計算ユニット(17)を有している。  (もっと読む)
(もっと読む)
車両及び車両の運転方法
本発明は、(i)アンダーキャリッジ(20)と、前記アンダーキャリッジ(20)に対して垂直軸(90)の周りを回転可能に配設されたアッパーキャリッジ(30)、及び(ii)前記アッパーキャリッジ(30)に対して水平軸(80)の周りを回動可能に配設されたてこ手段(40)の少なくとも一方を備えた車両(10)であって、前記車両(10)の傾斜運動に対して少なくとも1つの安定性基準を監視するためのセンサシステム(100)が提供され、制御装置(150)が前記センサシステム(100)に連結されて、前記少なくとも1つの安定性基準に応じて前記車両(10)を安定化させるための動作を自動的に開始及び/又は実行する、車両(10)に関する。これにより車両の予期せぬ傾斜リスクが軽減される。 (もっと読む)
建設機械
【課題】建設機械において、バケットチルトエンド位置付近での緩停止制御を行なうとともに、バケットチルトエンド位置付近での荷位置調整操作や暖機運転も行えるようにする。
【解決手段】高速バケットチルト操作が、バケットチルトエンド位置の近傍区間(B区間)より遠い位置(A区間)で開始された場合には、バケットが上記B区間に入った時点からバケットチルトの速度を強制的に減速するよう、緩停止制御を行う。他方、高速バケットチルト操作がB区間内の位置(S点)で開始された場合には、緩停止制御による減速開始位置(T点)を、高速バケットチルト開始位置(S点)より所定のオフセット距離分だけバケットチルトエンド位置に近い位置にずらす。さらに、高速バケットチルト操作が、バケットチルトエンド位置にほぼ相当する位置(C区間)で開始された場合には、緩停止制御を実行しない。
(もっと読む)
作業機のアーム位置制御システム
【課題】アームを目標停止位置の近傍に安定的に停止させることができるようにする。
【解決手段】アーム用停止弁26は、操作弁27からのパイロット油をアーム用制御弁25に供給する供給位置と操作弁27からのパイロット油を遮断してアーム用制御弁25に供給しない非供給位置とに切り替わる2方向切換弁とされ、当該2方向切換弁のパイロット油の導入ポート33側又は吐出ポート側に当該パイロット油の油温を測定する油温センサ30が設けられ、制御部32は、油温センサ30の油温におけるアーム用油圧シリンダ23の動作遅れに基づいてアーム19を設定位置に停止させるべく2方向切換弁の非供給位置への切換動作を決定するアーム位置制御手段35を備えている。
(もっと読む)
油圧ショベルの干渉防止装置
【課題】油圧ショベルの干渉防止装置としての安全性を維持しつつ、使い勝手を向上し、作業効率を向上する。
【解決手段】バケット101cの先端が減速領域Aを超えて停止領域Bに達すると、制御ユニット32は、電磁比例減圧弁33a,33b,33cの対応するものを全閉して油圧システムを動作不能とし、フロント作業機102の動作を自動停止させる。フロント作業機102のバケット101cが更に危険領域Cに侵入すると、制御ユニット32は油圧ロック弁34を切り換えて油圧システムを動作不能とし、油圧ショベルの全動作を停止させる。同時に、危険領域Cへの侵入距離を計算し、その侵入距離に応じて停止領域Bの反危険領域C側の境界線E2を外側に移動して停止領域Bを拡大するよう補正する。補正した境界線E2が限界域E2limitに達するとそれ以上の補正を禁止し、警報装置36を鳴らす。
(もっと読む)
1 - 20 / 47
[ Back to top ]