
Fターム[2D054GA86]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出手段 (180) | ワイヤー等のガイドラインによるもの (8)
Fターム[2D054GA86]に分類される特許
1 - 8 / 8
孔路位置計測方法及び装置
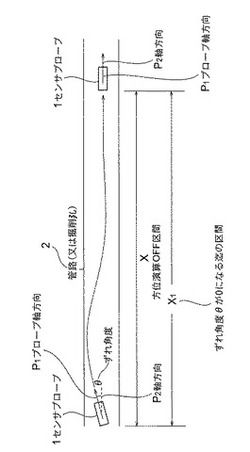
【課題】本発明は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止することを目的とする。
【解決手段】本発明による孔路位置計測方法及び装置は、センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わないようにした方法と装置である。
(もっと読む)
シールド掘進機

【課題】簡易な構造で精度よくコピーカッタの突出量を制御する。
【解決手段】地盤を掘削するカッタヘッドの径方向外方に出没可能に設けられ、カッタヘッドの回転中心に向けて延びるロッド18を備えたコピーカッタと、コピーカッタを出没させる油圧シリンダと、カッタヘッドの回転中心を含む領域およびコピーカッタの先端がカッタヘッドの外周面と一致した原点位置となったときのロッド18が視認可能に設けられたファイバスコープ23と、ファイバスコープ23の視野内に設けられ、ロッド18の後端部18aと一致したときにコピーカッタが原点位置となる原点指標部20とを有し、ロッド18の後端部18aを原点指標部20に一致させてコピーカッタの原点位置を調整した後にコピーカッタを突出させる。
(もっと読む)
掘進機の位置測定に用いる角度測定装置及び掘進機の推進工法
【課題】埋設管の姿勢変化により角度測定装置が水平面に対して傾斜しても、屈折角度を正確に測定できる掘進機の角度測定装置及び掘進機の推進工法を提案する。
【解決手段】埋設管内で略水平に取り付けられる取付け板11と、この取付け板11に傾斜角度変更可能に保持された傾斜補正板12と、この傾斜補正板12の傾斜角度を測定する傾斜角度測定器26A,26Bと、傾斜補正板12を水平に角度補正する補正駆動軸13A,13B及び補正モータ21A,21Bと、傾斜補正板12に保持され設計上の敷設ルートに対する屈折角度を測定する屈折角度測定器31と、この屈折角度測定器31の固定子31aと回動子31bとにそれぞれ取着された一対の測定アーム42,44と、これら一対の測定アーム42,44のそれぞれの先端部に掛止される伸縮可能な一対の弾性線材であるテグス46,48と、を備えて角度測定装置を構成した。
(もっと読む)
相対位置検出装置、連結構造、及び連結方法
【課題】地中連結を容易にする相対位置検出装置、連結構造、及び連結方法を提供する。
【解決手段】相対位置検出装置は、第一シールド掘進機1の位置に対する第二シールド掘進機2の相対位置を検出する相対位置検出装置であって、第一シールド掘進機1に設けられ、地盤を掘削するとともに第二シールド掘進機2に向けて伸長するボーリングマシン101と、ボーリングマシン101に設けられ、第二シールド掘進機2に向けて伸長し、当該第二シールド掘進機2のカッタ部202のスリットSの間隙よりも小径の伸長部102と、伸長部102に設けられ、放射線を放射する放射部103と、第二シールド掘進機2の内部に設けられ、放射部103が放射する放射線の位置を検出する放射線検出器201と、を備える。
(もっと読む)
推進工法用位置計測方法及びその装置
【課題】
複数接続された推進管の折れ角度及び方向を三次元的に即座に計測でき、各計測点の距離から推進管全体の位置を計測できる。
【解決手段】
推進工法において、掘進機1の後部に一端を固定し他端を複数の推進管2の中を通して発進立坑3内で張力をかけた測定用ワイヤ5を設け、当該測定用ワイヤ5を推進管2内の複数の位置で支持させ、当該各支持は、上記測定用ワイヤ5を遊通させる支持体7で支持し、当該支持箇所で測定用ワイヤ5の外周周囲の上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、上記ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する。
(もっと読む)
孔路計測方法及び装置
【課題】従来、計測と掘削を繰り返しながら計測を行う場合、掘削の入り口が掘削過程で動くことが多く、その動き量の検出ができないため、計測誤差が増大する。従って、計測の初期方位誤差を除去し、計測精度の向上を図る。
【解決手段】掘削孔2の横位置に基準台20を設け、前記基準台20にプローブ1を設置した時の計測基準方位角Aを基準方位角として掘削孔2の計測を行う。また、前記計測基準方位角Aと前記掘削孔2の掘削基準方位角とのずれ量を予め計測しておき、前記計測時に計測した計測基準方位角Aに補正を加える。
(もっと読む)
孔路計測方法及び装置
【課題】本発明は、プローブの静止時間の角速度信号を平均化して得た角速度バイアス値を以降の角速度信号から差し引くことにより、角速度計固有のバイアスをキャンセルし、バイアスの大きい角速度計でも高精度の孔路計測を行うことを目的とする。
【解決手段】本発明による孔路計測方法及び装置は、計測の前後又は途中でプローブ(1)を静止させ、静止の期間の角速度信号(r)を計測し、これを平均化して角速度バイアス値(m1…)として演算部(7)に記憶し、以降の角速度信号から角速度バイアス値(m1…)を差し引き、角速度計固有のバイアスをキャンセルする方法と構成である。
(もっと読む)
シールド掘進機、およびテールクリアランスおよび/またはセグメントトンネル内空寸法の測定方法
【課題】 掘進機の掘進とテールクリアランス等の計測を並行しておこなうことができ、マシンテール後方の任意のセグメントリングの内空寸法を自動計測することのできるシールド掘進機、およびテールクリアランスおよび/またはセグメントトンネル内空寸法の測定方法を提供すること。
【解決手段】 シールド掘進機1を構成するスキンプレート2の内部で、該シールド掘進機1の延伸方向に延びる通路用配管4の回りを回転可能で、その延伸方向に移動可能な移動装置6と、移動装置6に装着された伸縮装置71,71と、伸縮装置71の先端に装着された距離センサ81が設けられている。移動装置6の通路用配管4まわりの回転と、通路用配管4の延伸方向への移動に応じて、距離センサ81がスキンプレート2の内面までの距離とセグメントまでの距離を測定することにより、テールクリアランスや、セグメントリングの真円度などを自動測定することができる。
(もっと読む)
1 - 8 / 8
[ Back to top ]