
Fターム[2F051AC03]の内容
特定の目的に適した力の測定 (5,882) | 電気回路 (196) | 補償用 (69)
Fターム[2F051AC03]の下位に属するFターム
Fターム[2F051AC03]に分類される特許
1 - 20 / 28
外力検知装置、ロボット制御システム及び外力検知方法
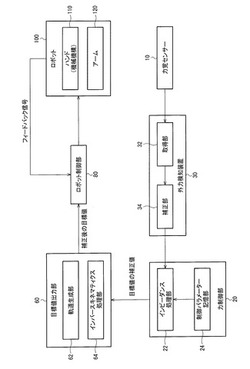
【課題】 力覚センサーの先に設けられた機械機構により外力が変調される場合に、精度の高い外力検知を行う外力検知装置、ロボット制御システム及び外力検知方法等を提供すること。
【解決手段】 外力検知装置30は、力覚センサー10から出力されたセンサー情報を取得する取得部32と、取得したセンサー情報に対して補正処理を行う補正部34とを含み、力覚センサー10には、外力fを変換して力Fとして力覚センサー10に伝達する機械機構(ハンド110等)が設けられ、補正部34は機械機構での変換の逆変換を補正処理として行う。
(もっと読む)
センサ付車輪用軸受装置

【課題】 軸受部での検出荷重がブレーキ動作時のような車両の所定状況に影響を受けるのを補正して、車両の状況がブレーキ中など所定の状況にあっても正確な荷重を検出できるセンサ付車輪用軸受装置を提供する。
【解決手段】 車輪用軸受100に、この軸受に加わる荷重を検出する1つ以上のセンサ20を設け、これらセンサ20の出力信号を処理して信号ベクトルを生成する信号処理手段31と、前記信号ベクトルから車輪に加わる荷重を演算する荷重演算処理手段32を設ける。荷重演算処理手段32は、荷重の演算結果に影響する車両の所定状況の有無を判別して、その有無に対応した2種類の演算処理を行う機能を有する。荷重演算処理手段32で判別される車両の所定状況の有無とは、例えばブレーキのON・OFFである。
(もっと読む)
変形センサ、キャリブレーション方法、キャリブレーション用プログラム
【課題】センサ体の歪みによる誤差を小さくすることが可能な変形センサ、キャリブレーション方法、キャリブレーション用プログラムを提供することを課題とする。
【解決手段】変形センサ1は、弾性変形するセンサ体22と、センサ体22の変形量に対応する検出値を算出する制御部と、を備える変形センサ1であって、制御部は、時系列的に前後する、早期の検出時T8の検出値F30と、遅期の検出時T9の検出値F23と、を比較する検出値比較部と、センサ体22が弾性力を蓄積しながら変形する際の検出値F23の変化方向を正方向として、二つの検出値の比較の結果、遅期の検出時T9の検出値F23が、早期の検出時T8の検出値F30未満である場合、早期の検出時のセンサ体22の歪みによる誤差を小さくするために、遅期の検出時T9の検出値F23を補正する補正部と、を有する。
(もっと読む)
センサ付車輪用軸受
【課題】 センサの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重を得ることができるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材と内方部材のうちの固定側部材にセンサユニットを設け、そのセンサ出力信号から荷重を推定する荷重推定手段31を設ける。荷重推定手段31は、推定演算式を用いて荷重を演算する荷重推定演算部35と、複数のセンサ出力信号から推定演算式のパラメータ切替指標となる評価値Ei を算出する評価値算出部32と、評価値Ei をしきい値Ci と比較した結果を基にパラメータを切り替えるパラメータ切替部34とを備える。荷重推定演算部35は、しきい値Ci を含む一定の評価値領域内で、しきい値Ci を挟む両側の評価値領域でのパラメータにより演算された2つの荷重推定結果を合成して演算結果を補正する演算補正部35aを有する。
(もっと読む)
ペダル荷重センサ
【課題】荷重配分の影響を除去して、荷重を高精度に検出できるようにしたペダル荷重セ
ンサを提供する。
【解決手段】ペダル踏力が加えられる荷重受けプレート11と、荷重受けプレートの両端
部に設けられた荷重入力部12a、12bに両端部を固着された起歪体13と、起歪体の
中央部を支持する支持部14と、起歪体の表面に直線上に沿って配設され起歪体の歪によ
って圧縮応力と引張応力が作用される少なくとも4つの歪抵抗素子21〜24と、圧縮応
力が作用される歪抵抗素子と引張応力が作用される歪抵抗素子とによって構成される第1
および第2のブリッジ回路BC1、BC2と、これら第1および第2のブリッジ回路の出
力を加算する第1の加算回路28と、第1および第2のブリッジ回路の出力の差に応じて
第1の加算回路の出力を荷重受けプレートに加えられた踏力に一致した値となるように補
正する補正手段35とを備えた。
(もっと読む)
ステアリング操作状態推定装置、及びプログラム
【課題】従来技術と比較して、より精度が良好な力とトルクを検出する。
【解決手段】ステアリングホイール22の予め定められた部分に作用する力及びトルクを検出するための6分力検出器14と、車両の姿勢角を検出する姿勢角センサ18と、ステアリングホイールの操舵角を検出する操舵角センサ16と、車両の加速度を検出する加速センサ20と、検出された力及びトルク、検出された姿勢角、姿勢角から得られる第1の角速度、第1の角速度から得られる角加速度、検出された操舵角、操舵角から得られる第2の角速度、第2の角速度から得られる角加速度、検出された車両の加速度、予め定められた部分の質量、及びステアリングホイールの傾斜角に基づいて、ドライバが予め定められた部分に加え、かつ前記部分に発生した遠心力及び慣性力が除去された力及びトルクを推定する。
(もっと読む)
センサ付車輪用軸受
【課題】 環境の変化や長期間の使用によっても検出精度が悪化することなく、車輪にかかる荷重を正確に推定できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材と内方部材のうちの固定側部材にセンサユニットを設ける。センサユニットは、歪み発生部材とその歪みを検出するセンサ22とでなる。センサ22の出力信号の平均値を用いて車輪に加わる荷重を推定する主荷重推定手段31と、センサ22の出力信号の転動体5の通過による信号波形の振幅値を用いて荷重を推定する振幅処理荷重推定手段36を設ける。その振幅処理荷重推定値s2により、主荷重推定手段31の平均値を用いた推定荷重出力s1のドリフト量を推定するドリフト量推定手段37を設ける。そのドリフト量で補正する補正手段33を設ける。
(もっと読む)
車輪入力測定装置および車輪入力測定方法
【課題】6分力計を用いてホイールに作用する力を正確に検出する。
【解決手段】車輪に入力される直行座標系の3軸(X、Y、Z)方向と当該3軸を中心とする回転方向のモーメント(Mx、My、Mz)との6分力(Fx、Fy、Fz、Mx、My、Mz)を測定する6分力計を有している。前記6分力計には、6分力計の対地座標系に対する傾斜角を検出する傾斜角センサと、前記6分力計の対地座標系に対する角速度を検出するジャイロセンサとが取り付けられる。補正手段は、前記傾斜角センサによって検出された前記6分力計の対地座標系に対する傾斜角と前記ジャイロセンサによって検出された前記6分力計の対地座標系に対する角速度とに基づいて、前記6分力計によって検出された前記車輪に入力された前記直交座標系の6分力を対地座標系に対する6分力に補正する。
(もっと読む)
センサ付車輪用軸受
【課題】 転動体の影響を受けることなく、車輪にかかる荷重を正確に検出できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受は、外方部材1と内方部材2の対向し合う複列の転走面3,4間に転動体5を介在させたものである。外方部材1と内方部材2のうちの固定側部材に、車輪用軸受に作用する荷重を検出する荷重検出手段20と、転動体の位置を検出する転動体検出手段40と、この転動体検出手段40が検出する転動体位置に基づき前記荷重検出手段20の出力信号を補正する補正手段30を設ける。この補正手段30で補正された前記荷重検出手段20の出力信号からタイヤ接地面に作用する荷重もしくは車輪用軸受に作用する荷重を推定する推定手段31を設ける。
(もっと読む)
荷重検出装置および荷重検出方法
【課題】細い線状体の先端に作用する荷重を容易に検出することが可能な荷重検出装置および荷重検出方法を提供する。
【解決手段】この荷重検出方法では、屈曲した体内の管に挿入された中空チューブ1の入口に可撓性を有する線状体2を挿入する荷重Fiを検出するとともに、中空チューブ1または線状体2の画像を撮影し、その画像から中空チューブ1または線状体2の曲がり具合を検出し、検出した挿入荷重Fiおよび曲がり具合に基づいて、線状体2の先端の荷重Foを演算する。したがって、細い線状体2の先端荷重Foを容易に検出できる。
(もっと読む)
ステアリング操作状態検出装置、自動車、及びステアリング操作状態検出方法
【課題】運転者の操作入力分だけを正確に検出する。
【解決手段】6分力計Ssで検出した6分力λを、ステアリングホイール2の姿勢に応じて補償する(ステップS2、S3)。つまり、ステアリングホイール2の自重によって6分力計Ssに作用する分力がステアリングホイール2の姿勢に応じて変化する分力変化特性を予め取得しておき、その分力変化特性を参照し、ステアリングホイール2の自重によって作用する分力だけ、6分力λを補償する。
(もっと読む)
簡易動摩擦測定装置
【課題】
摩擦測定に使用するロードセルは、傾倒させると、ロードセル自体および取付けられた部品なのどの自重による力の値も同時に測定されてしまうため、測定結果に誤差が生じやすい。
【解決手段】
測定手段11であるロードセル15の先端に着脱可能に取付けた接触子20を被測定物Aに当接させながら移動させて垂直荷重と摩擦抵抗力を同時に測定し、次いで、前記ロードセル15の傾動に伴う傾斜角度を加速度センサ18で検知すると共に、前記修正装置42により垂直荷重および摩擦抵抗力以外の負荷荷重を相殺し、垂直荷重と摩擦抵抗力による摩擦係数(静摩擦と動摩擦)を表示部43にグラフ表示すると共に記録部45に記憶させることを特徴とする。
(もっと読む)
ブレーキ力検出装置
【課題】 ブレーキをかけた方向にかかわらず常に正確なブレーキ力を検出可能なブレーキ力検出装置を提供することである。
【解決手段】 ブレーキ力検出装置であって、キャリパブラケットに生じるブレーキ時の歪を検出する歪ゲージと、歪ゲージの検出値からブレーキ力を算出するブレーキ力算出手段と、今回のブレーキが前進状態におけるブレーキか、後退状態におけるブレーキかを判別する前進・後退ブレーキ状態判別手段とを含んでいる。ブレーキ力算出手段は、前回のブレーキと今回のブレーキが同一方向の場合は、前回のブレーキと今回のブレーキが反対方向の場合に対して、同一の検出値に対して算出されるブレーキ力が低くなるように補正する補正手段を含んでいる。
(もっと読む)
転がり軸受ユニットの状態量測定装置に対する演算情報の記録方法
【課題】互いに組み合わせて使用する転がり軸受ユニット11、11と状態量演算器12とをセットで出荷できない場合でも、上記各転がり軸受ユニット11、11を自動車の懸架装置に組み付ける際に、車体側に設置されている上記状態量演算器12のメモリ中に、上記各転がり軸受ユニット11、11に関する演算情報(零点及びゲイン特性に関する情報)を的確に記録できる方法を実現する。
【解決手段】車室内の一部に設置したコネクタ18と、上記状態量演算器12とを、配線17により接続する。出荷時に上記各転がり軸受ユニット11、11に対して付与された演算情報を読み取る。そして、この読み取った演算情報を、上記コネクタ18から上記状態量演算器12にシリアル通信で送信し、上記メモリ中に記録する。これにより、上記課題を解決する。
(もっと読む)
ホイールの外力計測装置
【課題】車両のホイールに作用する外力のうち、少なくとも該ホイールの回転軸心に直交する分力成分を精度よく計測することができるホイールの外力計測装置を提供する。
【解決手段】ホイール3と一体に回転する多分力検出器4の出力のうち、ホイール3と一体に回転する回転座標系の2軸に関する出力にローパス特性のフィルタリングを施すフィルタリング手段11と、このフィルタリング手段11の出力を多分力検出器4の出力から減じる補正手段12を備える。フィルタリング手段11は、ホイール3の回転周波数が所定の下限値以上である場合にフィルタリングを施す。補正手段12の出力に基づいてホイール3の回転軸心と直交する静止座標系の2軸に関する外力の分力成分を計測する。
(もっと読む)
パンタグラフの接触力測定方法及び接触力測定装置
【課題】より少ない数のセンサで精度のよい接触力測定を行うことができるパンタグラフの接触力測定方法及び接触力測定装置を提供する。
【解決手段】本発明は、すり板体110を舟体120に対して支持するすり板体付勢バネ112の反力を、FBGセンサを有するひずみゲージによって求め、反力に基いて舟体120に対するすり板体110の相対変位を求めてこれを二階微分して相対加速度を算出する。これによって、すり板体110に加速度センサを設けることなくすり板体110の慣性力を測定することができ、少ないセンサで精度のよい接触力測定を行うことができる。
(もっと読む)
多分力計測法およびその装置
【課題】本発明の課題は、力検出センサと加速度センサを組み合わせた多分力計測において、力計測系から振動に起因した慣性力の影響を厳密に排除すると共に、様々な計測系の構成に柔軟に対応できるようにセンサ位置に任意性をもたせて模型に作用する各分力を精度良く計測する方法とそれを実施する装置を提供することにある。
【解決手段】本発明の力計測方法は、計測対象物に固定された接続部材を介して前記計測対象物に作用する所定方向の力を検出する力検出器と、前記接続部材または計測対象物に固定された加速度センサとを用い、前記加速度センサと力検出器の時系列信号の相互相関係数が最大値となる相関時間を算出し、加速度センサにより検出された加速度が設定加速度となる時刻を検知して該検知時刻から前記相互相関係数が最大値をとる時間が経過した時刻を特定し、該特定時刻における所定方向の力検出器の検出値を計測対象物に作用する振動による慣性力が力検出器に影響しない値として採用するようにした。
(もっと読む)
車輪情報取得装置および車両制御装置
【課題】車輪に作用する加速度情報から得られる情報を精度よく取得可能とする。
【解決手段】車輪側装置は、車輪14の加速度を検出する加速度センサ68と、その加速度センサ68による検出情報を含む車輪情報を送信可能なTPMS送信機とを収容したケース62を有し、そのケース62が車輪14を構成するタイヤ30とホイール50との間に形成された内部空間Sに配置される。車体側装置は、TPMS送信機から送信された車輪情報を受信する受信部と、車輪14の回転に伴う遠心力によるケース62の変位量を推定する変位量推定部と、受信された車輪情報に含まれる加速度情報から得られる横力をケース62の変位量に基づいて補正する補正部とを有する。
(もっと読む)
接地荷重推定装置
【課題】あらゆる運動状態において、車両運動制御に利用するのに十分な精度をもって車輪の接地荷重を推定することができる接地荷重推定装置を提供する。
【解決手段】キャンバ角算出部42と、ロール角算出部43と、接地荷重算出部44とからECU9を構成し、ECU9と、レーザ距離センサ11と、ダンパストロークセンサ12と、タイヤ空気圧センサ13と、操舵角センサ14と、車速センサ15とから接地荷重推定装置40を構成する。接地荷重算出部44においてレーザ距離検出結果からタイヤ変位量を算出して接地荷重Wを推定するに際し、キャンバ角算出部42およびロール角算出部43において、ダンパストローク量検出結果からキャンバ角およびロール角を算出し、タイヤ変位量の補正に用いる。同様にタイヤ空気圧検出結果、操舵角検出結果および車速検出結果を用いてタイヤ変位量を補正する。
(もっと読む)
側突検知装置、側突検知方法
【課題】外乱があっても、障害物の衝突を精度よく判定することができる側突検知装置及び側突検知方法を提供すること。
【解決手段】サイドドア1の内部に配置された圧力センサ5により車両の側面への衝撃を検知する側突検知装置10において、スピーカ11,12が発生する音量に応じて圧力センサ5の検出値を補正することを特徴とする。
(もっと読む)
1 - 20 / 28
[ Back to top ]