
Fターム[2F062EE17]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 変位の変換方法 (124) | 角変位と角変位との変換 (7)
Fターム[2F062EE17]の下位に属するFターム
ウォーム、ウォームホイール
Fターム[2F062EE17]に分類される特許
1 - 7 / 7
継ぎ手を備える角度測定装置
【課題】走査ユニットとステータとの間の半径方向補償運動によって測定誤差が生じない角度測定装置を提供する。
【解決手段】角度測定装置は走査ユニット20に回転自在に支承された軸と二つの構成部材の軸方向弾性並びに半径方向弾性で回転しない結合する継手とを備え、継手は一部材で形成された薄板から成り、ベース2とベースに形成された複数の継目板3,5,6と、継目板が二つの構成部材の他方に頑強に固定でき各継目板が三個の周辺方向に互いに間隔を置いた支点を有し、支点それぞれ一個が周辺方向において両他支点間の中心に位置し、中心支点は両構成部材の一方に頑強に固定でき且つ両他支点が継目板のベースに対する結合部を形成し、すべての継目板のすべての支点が一つの共通平面において位置し、走査装置がこの継手によってステータ10に回転しないけれども、軸方向弾性と半径方向弾性に連結できる。
(もっと読む)
関節部曲げ測定装置および曲げ測定方法

【課題】関節部曲げ測定装置を簡単な構成により小型化が可能で適用範囲が広く容易に機械的要素に対する安全性評価試験のデータを得ることができるようにする。
【解決手段】関節部曲げ測定装置10は、棒状の測定子本体部11と、この測定子本体部11の先端部にジョイント部19を介して回動可能に設けられた変位測定子12と、装置基体部15内に設けられたポテンショメータ13と、変位測定子12およびポテンショメータ13を連結する計測用ワイヤ14とを備える。計測用ワイヤ14は、測定子本体部11および変位測定子12に設けられた溝部17内に配されている。変位測定子12の角度変位量は、計測用ワイヤ14の移動量によりポテンショメータ13にて検出され、角度変換によって算出される。関節部曲げ測定装置10は、構成が簡単で小型化が図れるため、幼児の指先のような小さな部位を想定することができる。
(もっと読む)
ドリル形状測定装置
【課題】ドリルの刃先形状を、迅速且つ正確に測定することができると共に、安価な構成で測定することができるドリル形状測定装置を提供する。
【解決手段】ドリル12の刃先形状を測定するためのドリル形状測定装置であって、ドリル12を軸線13周りに回転可能に保持する保持手段14と、ドリル12の軸線方向に沿って移動可能で且つドリル12の軸線13と直交する軸25廻りに回動可能で、ドリル12先端部の切れ刃24に接触する測定ブロック23と、ドリル12の軸線13と直交する軸25廻りの測定ブロック23の回動角度に基づいて、ドリル12先端部の切れ刃24の角度θを検出する角度検出手段28と、ドリル12の軸線方向に対する測定ブロック23の位置に基づいて、ドリル12先端部の切れ刃24の位置hを検出する位置検出手段29とを備える。
(もっと読む)
絶対角検出方法及び絶対角検出装置
【課題】回転角度センサの誤差が絶対角に反映されにくい絶対角検出方法及び絶対角検出装置を提供する。
【解決手段】第1比例定数と、回転角θcaと回転角θcbとの差とを用いて演算し仮の絶対角KΦを求め、回転角θcaと第2比例定数とを用いて演算しメイン歯車2のシャフト回転角φacを求め、仮の絶対角KΦから回転角度センサ6におけるセンサ周期Θの繰り返し回数Ncaを求め、シャフト回転角φac及びセンサ周期Θとセンサ周期Θの繰り返し回数Ncaとから絶対角Φを求める。
(もっと読む)
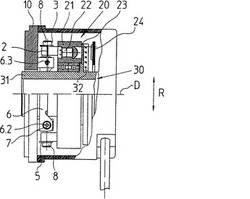
回転検出器
【課題】ロータと多重巻ユニットの間の歯車のギヤ結合における定義されない遊びが、最低限に抑えられる回転検出器を得る。
【解決手段】ハウジングと、ハウジングの中へ突入する測定されるべき駆動軸と回転不能に結合され、その角度位置が1回転の間に測定されるロータと、ハウジングに支承され、ロータが回転した回数を測定する多重巻ユニットとを有している。多重巻ユニットは、ロータと結合された駆動平歯車10および多重巻ユニットの被駆動平歯車12を有する歯車伝動装置を介して、ロータと連結されている。一方の平歯車10では、2つ目ごとの歯16の頭部がピッチ円まで短縮されている。他方の前記平歯車12では、2つ目ごとの歯溝18の底面がピッチ円まで充填されている。平歯車10、12は斜めに歯が切られており、はすば歯形の傾斜角は常に少なくとも1つの歯16が係合するように設定されている。
(もっと読む)
位置決め用ギヤボックスセンサーアセンブリ
本発明は、位置決めに使用されるギヤボックス内のセンサーアセンブリに関する。センサーアセンブリは相対するギヤボックスハウジング18に固定されたセンサー20を備え、ギヤボックスハウジング18とギヤボックス14、16の出力軸26の間の角度が出力軸26に固定され且つセンサー20に接続された軸28を使用して計測され、それによってギヤボックス14、16に遊びを包含するギヤボックス14、16で角度を計測するセンサーアセンブリが実現され、遊びを有するギヤボックス14、16が正確な角度を有する位置決めに活用し得るのと同時に高い精度を確保する。
(もっと読む)
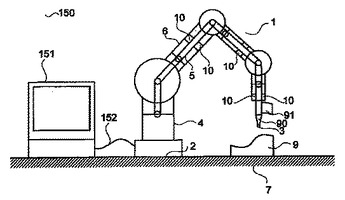
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]