
Fターム[2F062HH27]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ接触方向の変更 (35)
Fターム[2F062HH27]の下位に属するFターム
Fターム[2F062HH27]に分類される特許
21 - 34 / 34
表面感知デバイス
被加工物の表面を測定するための装置が説明される。装置は、座標位置決め機械のような機械(26)の可動アームに取り付けられ、そして、第1回転軸(1A)および第2回転軸(2A)まわりに回転でき、それら軸がそれぞれ第1モーター(M1)および第2モーター(M2)によって駆動される、支持体(7)を備える。装置は、付加的に、第3回転軸(4A)まわりに回転できる、被加工物の表面を感知するための表面感知デバイス(4)を備える。この第3回転軸(4A)は、第1回転軸(1A)に合わさることができ、合わされた場合、表面感知デバイス(4)に対する支持体(7)の回転は、表面感知デバイス(4)がホルダー(70)によって動かないように保持されるとき、第1モーター(M1)によって作動可能である。被加工物の表面を測定するための装置を使用するための方法は、また説明される。 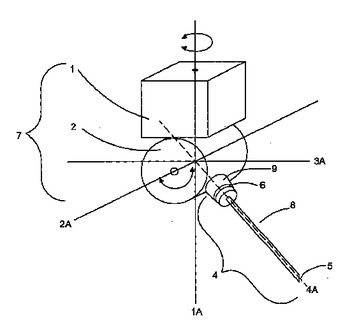 (もっと読む)
(もっと読む)
表面特性を測定するための測定器
支持アームに取り付けられた姿勢アームは、回転軸周りに回転可能である。姿勢アームは、触針が、回転テーブル上で回転されるワークピースの表面に沿って移動するときに、測定方向における触針の振れを表す信号を生成する触針器を保持する。姿勢切替機構は、回転テーブルのスピンドル軸にほぼ沿って並ぶ第1の触針姿勢と、回転テーブルのスピンドル軸にほぼ直交して配置される第2の触針姿勢と、の間で切り替えることを可能にする。測定方向とスピンドル軸とを一直線上に並べることを可能とするために、第1調節部及び第2調節部は、第1の触針姿勢及び第2の触針姿勢のそれぞれにあるときに、触針先端部が、スピンドル軸及び測定方向に直交して移動されることを可能にする。配向機構は、触針の測定方向を回転させるために設けられる。触針傾斜機構は、測定方向に平行な傾斜軸周りに触針を傾斜させるために設けられる。 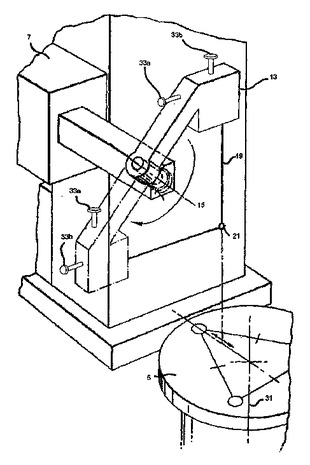 (もっと読む)
(もっと読む)
接触プローブおよび形状測定装置

【課題】被測定物表面に対する負荷が小さい接触プローブを提供する。
【解決手段】被測定物表面に当接する接触部312を先端に有する測定子310と、測定子310の変位を検出する検出センサと、測定子310の軸方向とは略直交して配置された弾性体のプレートであって測定子310の基端側を支持する支持プレート420と、測定子310を変位させるスタイラス変位手段440と、を備える。スタイラス変位手段440は、支持プレート420に応力を付与してそれぞれの点における支持プレート420の弾性変形量を変化させるアクチュエータ441〜443を備えている。
(もっと読む)
変位センサおよび形状測定装置

【課題】簡易な構成であって、測定子の変位を高精度に検出する変位センサを提供する。
【解決手段】測定子200と、測定子200を支持するセンサ本体部300と、を備える。センサ本体部300は、光源421と、受光光学系430と、光束シフト手段600と、を備える。受光光学系430は、光を受光して受光信号を出力する光センサ440と、光センサ440の前段に配設されたスリットプレート450と、を備える。光束シフト手段600は、測定子とともに変位する反射ミラー410と、反射ミラー410と受光光学系430との間に配設された集光レンズ423と、を備える。スリットプレート450は、4本のスリット451〜454を有する。光センサ440は、4つの受光部441〜444に分割され、受光部441〜444ごとに各スリット451〜454を通過した光を受光して受光信号を出力する。
(もっと読む)
変位センサおよび表面性状測定装置
【課題】微小変位を高精度に検出する変位センサを提供する。
【解決手段】測定子110の変位をエデンバネ機構411〜448を備えた変位拡大機構部400によって拡大し、この拡大された変位を変位検出手段600で検出して測定子110の変位量および変位方向を検出する。エデンバネ機構411〜448は、2枚の板バネ310、320を平行に近接配置した構成である。変位拡大機構部400は、8つのエデンバネ機構411〜448を備える。8つのエデンバネ機構411〜448は、円周上に等間隔に配設されている。
(もっと読む)
接触式触覚センサの制御方法およびそのシステム
【課題】物体の3次元形状の計測の高速化を図り、物体の3次元形状を計測する際の計測時間を短縮化する。
【解決手段】駆動電極と帰還電極とを有する圧電振動板と、上記圧電振動板に固着された針とを有し、上記駆動電極に交流電圧を印加することにより上記針が微小振動する一方で、上記帰還電極からは上記針の振動に応じた帰還電圧が出力される接触式触覚センサの制御方法において、所定の基準振幅値と現在の振幅値との差分から接触式触覚センサと測定対象物との相対距離を得る第1のステップと、上記第1のステップで得た相対距離の変化の履歴に基づいて、上記接触式触覚センサの速度を得る第2のステップとを有する。
(もっと読む)
座標測定機を用いてワークピースを精査する方法及び座標測定機
座標測定機を用いて測定すべきワークピース(71)をスキャニングによって精査する際に、スタイラス・チップはスキャニング・パス(73)に沿ったスキャニング前にプリスキャン・パス(83)に沿って移動し、及び/又は、スキャニング・パス(73)後にポストスキャン・パス(85)に沿って移動する。プリスキャン・パス及びポストスキャン・パスの長さ(Lv,Ln)は、具体的な測定作業の各パラメータ、特に、予め決定されたスキャニング速度、スタイラスの剛性及びスタイラスの質量に応じて選択される。 (もっと読む)
形状測定器
【課題】 測定プローブを傾斜させて支持しながら被測定物の表面形状を高精度に測定できる形状測定器を提供する。
【解決手段】 形状測定器30により既知形状の被測定物(真球)の形状を測定する(S12)。次に、測定プローブの設計傾斜角度の値から±0.5度間を5等分し、それぞれの形状誤差を算出し、誤差が最小となる角度値を決定する(S16)。更に同様な計算を繰り返すことで、誤差が最小となる傾斜角度に収束させる(S18、S20)。被加工部材を測定する際には、測定した形状を傾斜角度による誤差分で補正することで、測定精度を高める。
(もっと読む)
プローブのアプローチ方向設定方法、形状測定装置プログラム及び記憶媒体
【課題】 プローブ軸部の一端から突出する接触部を有するプローブのアプローチ方向を正確に設定できるプローブのアプローチ方向設定方法を提供する。
【解決手段】 プローブ軸部から突出する接触部を有するプローブを用いて被測定物表面を測定するにあたり、接触部が被測定物表面の測定点に当接する方向であるアプローチ方向を設定する。接触部の向きを固定した状態でプローブ軸部の一端または接触部を真円の輪郭に複数点で当接させながら真円の一周分にわたって前記プローブを移動させる(真円測定工程ST100)。プローブ軸部の一端または接触部が真円の輪郭に当接した際のプローブ軸部の位置をプローブ軸部に直交する面内で検出する(検出工程ST110)。検出工程にて検出された検出データと真円とのずれに基づいてアプローチ方向を設定する(アプローチ方向設定工程ST200)。
(もっと読む)
プローブ用の測定ヘッド
【課題】 触針の軌跡が、固定および固定解除の動作の際においてでさえも、完全に制御される測定ヘッドとを提供する。
【解決手段】支持要素(30)と、該支持要素(30)に接続され、支持要素(30)に対して第一軸(B)を中心に回転可能な第一可動要素(40)と、固定状態および固定解除状態にするためのアクチュエータとを有し、該アクチュエータが、固定解除状態にあるときに、第一可動要素(40)を支持要素(30)から離隔させ、第一軸(B)を中心に回転可能にするために第一可動要素(40)に固定解除力をかけるように構成され、固定状態にあるときに、支持要素(30)に対して第一可動要素(40)を再び締め付け、第一軸(B)の周囲の回転を防止するように第一可動要素(40)に固定力をかけるように構成されている。
(もっと読む)
配向自在な探触子
【課題】 探触子自体が嵩張ることないので、測定機械の移動距離の終点に近いところの座標、または複雑な形状の部品における座標の測定を、容易に行うことが可能な手段を提供する。
【解決手段】 固定部品(3)と、固定部品(3)に接続され、固定部品(3)に対して第1軸(B)の周りを回転することができる第1可動部品(4)と、第1可動部品(4)に接続され、第1可動部品(4)に対して第2軸(A)の周りを回転することができる第2可動部品(5)と、第2可動部品(5)と一体化した、細長い形状の探触体(6)とを含んでおり、探触体(6)が、固定部品(3)に対して平行移動することができるように構成されている。
(もっと読む)
伝達装置とその伝達装置をガイド面に押しつけるように付勢するばねとを備えたタッチプローブ
ケーシング(1)内に支持された可動アームセット(3)に結合されたアーム(13)を備えたタッチプローブは、ケーシングに取り付けられたハウジング(33)と、アームの変位を機械的に伝達する機械的伝達装置(61)とを備えた電気的スイッチ(31)を含み、その機械的伝達装置(61)は、小さな導電性ボール(51)を2つの導電性固定バー(44、45)から離れさせ、それによって、電気的検出回路を開く。機械的伝達装置の細長い機械的本体(63)は、細長い機械的本体の変位を正確にかつクリアランスなしに案内するために、トラック(71)に押しつけるように横方向に付勢される球状エレメント(67)を含む。屈曲板ばね(73)は、トラックに押しつける横方向スラストを実現し、かつ、細長い機械的本体の回転を阻止するために、球形伝達エレメントの平坦な部分に接触する。 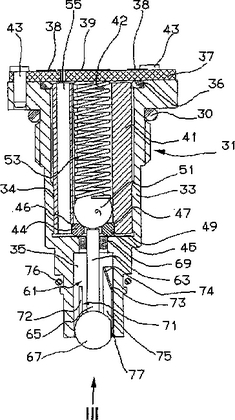 (もっと読む)
(もっと読む)
トリガ付探触子
【課題】 単純で信頼性があり、横力に対する一定の感度を有する探触子を提供する。
【解決手段】 接触ロッドのプレート(13)と一体化した6個の可動位置決部品(131、132、133、134、135、136)を有すると共に、固定機構と一体化した6個の固定位置決部品(141、142、143、144、145、146)を有し、該6個の固定位置決部品が、6個の可動位置決部品と、六つの接触点を画定するように組み合わされていると共に、六つの接触点が、接触ロッドの長手方向中心軸を中心に放射状に配分され、接触ロッドの長手方向中心軸に対して、直交する平面における偏向力に対して、均一な感度が得られるようになっている。
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
21 - 34 / 34
[ Back to top ]