
Fターム[2F063GA72]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | コード板、スケールの磁性体配列 (22) | 長手モード (11)
Fターム[2F063GA72]に分類される特許
1 - 11 / 11
位置検出センサ、これを備えたクラッチアクチュエータ、およびこれを備えたクラッチ装置
【課題】被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しつつ、コストを安くすることのできる位置検出センサを提供する。
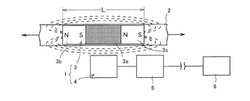
【解決手段】位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有する。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3c
と軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設される。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、従来の磁界発生部材3の長さより長く設定される。
(もっと読む)
位置検知装置、この位置検知装置を備えたシートベルトリトラクタ、およびこのシートベルトリトラクタを備えたシートベルト装置

【課題】移動部材の位置をより一層高精度に検知できる位置検知装置を提供する。
【解決手段】回転センサ15は、N極マグネット21aおよびS極マグネット21bが交互に円環状に配設されるとともに、スプールの回転に連動して回転するマグネット21と、マグネット21の円周方向に離間して配設されるとともにN極マグネット21aおよびS極マグネット21bの各磁極を検知する第1および第2ホール素子20a,20bとを
有する。その場合、第1および第2ホール素子20a,20bは、いずれもS極のみを検
知する単極検知タイプのホール素子である。また、S極マグネット21bの着磁幅が大きく設定されているとともに、N極マグネット21aの着磁幅が小さく設定されている。
(もっと読む)
ピストンロッド位置情報をピストンロッド上の磁性層に記録するシステム及び方法
【課題】ピストンロッド上の磁性層内にピストンロッド位置情報を記録するためのシステム及び方法を記載する。
【解決手段】シリンダに対して運動しているピストンロッド上に、記録媒体を構成する磁気的に硬い層が形成されている。磁気パターンが前記磁気的に硬い層内に記録されている。磁界センサが、前記ピストンロッドが前記シリンダに対して運動している間に前記記録された磁気パターンを感知し、前記磁気パターンに応答して、前記ピストンロッドの瞬時位置を求めるために用いられる信号を発生する。
(もっと読む)
エレベータケージの位置を確認するための装置を有するエレベータ設備
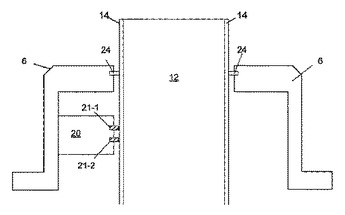
【課題】ガイドトラック(7)のガイドフランジ(21)に沿って移動可能なエレベータカー(2)の位置を確認するための装置を備えたエレベータ設備を提供する。
【解決手段】長手方向のコードマークモデル(10)は、エレベータカー(2)の全移動経路に沿って移動方向(8)で固定して設けられており、エレベータカー(2)と共に移動できるコード読み取りセンサシステム(12)によって非接触で検出される。コード読み取りセンサシステム(11)は、移動方向(8)で固定して配置されるとともに、ホルダ(14)を用いてエレベータカー(2)上に装着されており、これにより、コード読み取りセンサシステム(11)がエレベータカー(2)の移動方向(8)と垂直な方向に移動でき、長手方向のコードマークパターン(10)と垂直な第1の方向(x)で、ローラガイド(15)をガイドフランジ(21)のガイド面(25)上で転動させることができる。
(もっと読む)
シリンダ位置検出装置
【課題】ピストンロッドが回転したとしても誤差のないストローク位置検出を行うこと。
【解決手段】ピストンロッドの表面において、該ピストンロッドの直線的ストローク変位の方向に沿って面積が漸増又は漸減する区間を有する所定のパターンで配置された少なくとも1つの磁気応答部と、シリンダ本体の側に固定され、前記磁気応答部のパターンの夫々に対応して設けられたコイルとを具備する。ピストンロッドの直線的ストローク変位に応じて、該コイルに対する磁気応答部の対応面積が変化し、この対応面積の変化に応じて該コイルに生じる電気的インピーダンスが変化する。コイルは、ピストンロッドの回転によって磁気応答部のコイルに対する対応位置が相対的に円周方向に変位することを許容すべく、該磁気応答部に対向する該コイル端部の幅員を、該磁気応答部のパターンの円周方向についての最大幅よりも所定角度範囲だけ幅広に構成される。
(もっと読む)
位置検出装置
【課題】ダイカストマシン、等の鋳造設備の使用環境は金型冷却水、離型剤により水、油が充満しており、成形品のバリ、等の小片が装置に付着することが多い。このような設備に装備される位置を検出する検出装置においては、設置環境によらず正確な位置検出すると共に耐久性とメンテナンス性が要求される。
【解決手段】磁気による位置情報を有するスケールセンサを接着させる溝を刻設し、前記溝の凹面に前記スケールセンサを接着させ刻設した溝を埋めたロッドと、前記ロッドの外周に前記スケールセンサの磁気情報を検出する位置検出ヘッドを固接したスリーブとを具備してなる位置検出装置とした。
(もっと読む)
回転検出装置
【課題】 ステアリング軸などの回転体の回転角度を検出する回転検出装置を小型に構成して狭いスペース内に配置できるようにする。
【解決手段】 ステアリング出力部14にはパワーアシストのためのウオームホイール15が固定されており、このウオームホイール15に形成された平面歯車15bによって検出ユニット20の入力歯車22aが増速されて回転させられる。検出ユニット20内には、検出軸22の回転を減速する減速機構が設けられ、この減速によりケース内に設けられた検出回転部材が、前記ステアリング出力部14の回転と1:1の角度で回転し、その回転角度が検出素子で検出される。
(もっと読む)
回転角度検出装置
【課題】磁気感知素子による出力信号に基づき被検出回転体の回転角度を検出するにあたってその出力信号の振幅値やオフセット値にずれが生じた場合であれ、被検出回転体に対する検出精度をより好適に維持することのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を90度だけ位相のずれた正弦波信号A、Bとして感知する3つのホール素子対111a〜111cを有している。これら3つのホール素子対111a〜111cは、各々傾けて配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111cの別に上記クランク軸300の回転角度θを「θ=tan−1(A/B)」の演算式に基づいて算出する。次いで、算出した3つの信号の位相関係を維持しつつそれらの平均値を演算する。
(もっと読む)
シリンダ位置検出装置
【課題】小型かつシンプルな構造を持つシリンダ位置検出装置の提供。
【解決手段】検出部は、コイル部及びこのコイル部に対して相対的に変位可能に非接触的に配置される磁気応答部材を含み、該磁気応答部材の該コイル部に対する相対的位置に応じた検出信号を前記コイル部から出力する。前記シリンダ本体とピストン部の一方に該コイル部が配設され、他方に該磁気応答部材が配設されてなる。コイル部は、所定の交流信号によって定電圧駆動されるコイルを含み、該コイルへの磁気応答部材の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測し、これに基づき前記ピストン部の位置検出データを得る。
(もっと読む)
ピストンロッド位置情報をピストンロッド上の磁性層に記録するシステム及び方法
【課題】ピストンロッド上の磁性層内にピストンロッド位置情報を記録するためのシステム及び方法を記載する。
【解決手段】シリンダに対して運動しているピストンロッド上に、記録媒体を構成する磁気的に硬い層が形成されている。磁気パターンが前記磁気的に硬い層内に記録されている。磁界センサが、前記ピストンロッドが前記シリンダに対して運動している間に前記記録された磁気パターンを感知し、前記磁気パターンに応答して、前記ピストンロッドの瞬時位置を求めるために用いられる信号を発生する。
(もっと読む)
移動する構成要素の位置を磁気的に感知するシステムおよび方法
シリンダに対して動いているピストンロッドの位置を磁気的に感知するための位置感知システム。ピストンロッド上の磁気的硬質層は、記録媒体を提供する。情報は、磁気的硬質層の領域に磁気的に記録されている。このような領域は、ピストンロッドの位置を決定するための相対符号化方式を提供する。磁場センサーが、磁気的に記録された領域の冗長トラックを覆って配置されている。所与のトラックを覆って配置された各磁場センサーは、ピストンロッドがシリンダに対して動く間、同一の磁化領域を感知する。別の磁場センサーは、同相除去を実施する際に使用する周囲場を感知することができる。書込みヘッドが、磁場センサーによって検出された損傷または消去された領域を動的に修復することができる。バッテリーバックアップ電源によって活性化されて、磁場センサーと関係する回路は、機械装置がオフの間に引き続いてピストンロッドの動きを追跡することができる。
 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]