
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
2,001 - 2,020 / 2,128
移動軌跡解析方法

【課題】 多くの人手間を要することなく、車両や人その他の移動体の移動軌跡に関する詳細なデータを、簡易な操作で得ることができる移動軌跡解析方法を提供する。
【解決手段】 まず、トランシット、レベル等の機材により、ターゲット(標定点)Aの基準点測量を行う。次に、3Dスキャナー22により、道路2部分について、道路構造をスキャニングし、点群データ(3次元座標)を取得する。その後、ビデオカメラ21により、車両11や歩行者等の移動体をビデオ撮影する。3Dスキャナー22により得られた点群データから、障害物あるいは不要なデータを除去し、この点群データとビデオ映像をマッチングさせる。ビデオ映像の各フレーム画像の解析から車両11等の移動軌跡を抽出する。
(もっと読む)
画像処理装置及び方法

【課題】 画像間の対応付けをよりロバストかつ高精度に行うことともに、かかる対応付けにおいて発生する視差に基づくミスマッチを極力低減させることが可能となる。
【解決手段】 少なくとも2台のカメラ11a,12aにより互いに異なる視点から被写体を撮像することにより得られた各画像間の視差を検出し、検出した視差に基づいて各画像をそれぞれ複数の画像領域に分離し、分離した画像領域につき被写体と関連させつつ互いに同一の水平ライン上にある画素位置毎に対応関係を求め、互いに対応付けした画素位置並びにその輝度成分から、仮想的に設置される仮想カメラにより生成すべき仮想視点画像を構成する。
(もっと読む)
単粒子三次元位置追跡方法
【課題】 x、y、z座標系で構成される三次元空間に存在する粒子の運動を実時間で追跡することを可能にする共焦点顕微鏡システム、および、画像処理方法を提供すること。
【解決手段】 共焦点顕微鏡において、駆動部の粘性抵抗を高めたピエゾアクチュエータを使用して、対物レンズをステップ状に動かした時のオーバーシュートの減衰を早める。この手法により、ビデオフレームの撮影時間外で焦点を移動させ、撮影時間内では焦点を固定することで、鮮明な二次元切片を高速に取得することができ、三次元画像の実時間観測が可能になる。また、三次元空間に存在する粒子の像を三次元ガウス関数で近似し、継時的に粒子の重心位置を求めることで、三次元空間を運動する粒子を実時間で追跡することが可能になる。
(もっと読む)
立体視装置およびそれを備えた立体画像表示システム
【課題】 超小型、かつ低消費電力、かつリアルタイム撮像が可能な立体視装置およびそれを備えた立体画像表示システムを提供する。
【解決手段】 この立体視装置では、超音波発生器4は、LFSR11からのPN符号に従って振幅変調された超音波を生成して対象物6に照射する。イメージセンサ14は、複数行複数列に配置され、各々が対象物6からの反射波を受け、受けた反射波を電気信号に変換する複数の単位キャパシタを含む。相関器15は、複数の単位キャパシタの各々によって生成された電気信号の位相とLFSR12からのPN符号の位相とを比較し、比較結果に応じて相関値DATAを出力する。これにより、対象物の三次元的な立体画像をリアルタイムに得ることができる。また、立体視装置内部に記憶回路やプロセッサが不要であるため、超小型で低消費電力の立体視装置が実現できる。
(もっと読む)
三次元形状計測システム及び計測方法
【課題】 大きい物体、形状が複雑な測定対象物でも、運動パラメータを簡単かつ高精度に求め、高精度の三次元形状を得る計測システム等を提供する。
【解決手段】 測定対象物163に正弦波格子パターンを投射する格子パターン投射手段101と、格子パターン投射手段を一定の方向に一定量ずつ移動させる格子駆動手段と、独自の原点と座標軸からなる座標系を有し、正弦波格子パターンが投射された測定対象物の画像を撮影する画像撮影手段100と、画像撮影手段を移動させる移動手段と、測定対象物に正弦波格子パターンを投射する補助的な第2の格子パターン投射手段162と、第2の格子パターン投射手段を一定の方向に一定量ずつ移動させる第2の格子駆動手段と、移動前後の画像撮影手段の各々の座標系を一致させる統合キャリブレーション手段とを備える三次元形状計測システム等。
(もっと読む)
ステレオ画像による平面推定方法
【課題】平面上から十分な特徴点が得られないような場合でも、既知マーカ等の設置なしに、高精度に平面推定を行う。
【解決手段】 平面上を移動する物体が撮像できるように設置された複数の撮像手段によってステレオ画像を撮像し、前記ステレオ画像のうちの基準画像について複数の特徴点を抽出し、抽出した各特徴点について他の画像中の対応点を探索して得られる視差から三角測量の原理により3次元座標を求め、抽出した各特徴点位置の画像に類似する画像を物体の移動前後の画像から検出し、抽出した各特徴点の3次元的な移動ベクトルから前記平面の3次元的位置を算出するようにした。
(もっと読む)
パラメータ推定装置、パラメータ推定方法、及び、パラメータ推定プログラム
【課題】 ビデオカメラを使って手動操作により撮影した画像から外界の物体の空間情報を復元するときにそれぞれ焦点距離が変化するため、従来の因子分解法を利用することができず、ピント調整のために変化する焦点距離を同時に復元する必要があるという問題を解決する。
【解決手段】 因子分解処理部43で各画像の特徴点の時間的変化量を示す画像座標値から行列データを作成し、この行列データを特異値分解し雑音除去を行って運動情報を表す行列データと3次元情報を表す行列データとを得て、運動情報の成分において運動を規定するために設定した条件を満足する変換行列を求め、運動情報となる行列データに変換行列を作用させてカメラ視点運動を復元し、3次元情報を表す行列データに変換行列の逆行列を作用させて物体形状を構成する3次元情報を復元し、光軸並進運動復元・焦点距離推定部44でカメラ視点の光軸方向の並進運動の再現、焦点距離の推定を行う。
(もっと読む)
三次元形状測定方法及び三次元形状測定装置
【課題】 表面形状を短時間で精度良く測定することができる三次元形状測定方法及び三次元形状測定装置を提供する。
【解決手段】 三次元形状測定装置1は、縞パターン照射手段としてのパターン照射ユニット20と、2次元に配置された複数の画素を有するCCDカメラ9と、エッジ点特定用レーザ光源としてのエッジ点特定レーザ出力装置7と、演算処理手段としてのコンピュータ10と、を備える。ガラス2の被測定面2Aに向かって、ライン状(線状)のレーザ光LR1を出射しガラス2の任意の位置にあるエッジを発光させ、その発光したエッジをエ
ッジ点Pとし、該エッジ点Pを基準に各ガラス2の被測定面2Aの表面形状を算出するようにした。
(もっと読む)
プロジェクタによる位置および向きの読み取り
プロジェクタの位置および向きは、投影された画像から求められる。まず、カメラと平坦な表面の間のホモグラフィを求めることであって、カメラおよび平坦な表面は互いに固定した相対位置にある。次に、既知のパターンは、既知の固有パラメータならびに未知の位置および向きを有するプロジェクタで平坦な表面上に投影される。カメラで既知のパターンの画像は取得され、ホモグラフィおよび固有パラメータを用いて画像からプロジェクタの位置および向きは求められる。 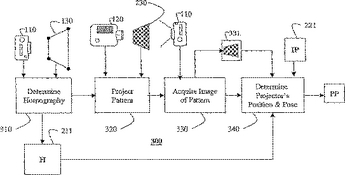 (もっと読む)
(もっと読む)
ロボットビジョンによる計測装置及びロボット制御装置
【課題】 視覚センサの撮像部を複数のロボットで付け替えて使用する場合の作業効率改善。
【解決手段】 可搬式操作部40から撮像指令をロボット制御装置11、ネットワーク回線30、トランシーバ6を介して無線で撮像部4に送り、計測対象物50を撮像する。画像データは無線でトランシーバ6に送られ、ネットワーク回線30を介してロボット制御装置11内の画像処理装置21で処理され、P1〜P3の3次元位置が計測され、ロボット1に対する計測対象物50の3次元相対位置姿勢が求められる。撮像部4をロボット2、3に着け替え、各対応する計測対象物について同様の計測を行なう。ネットワーク回線30と無線の利用でケーブル取り外し・接続作業が削減される。画像処理装置はロボット制御装置の外部に置き、ネットワークに組み込んでも良い。
(もっと読む)
距離画像センサ
【課題】測定可能範囲を超える対象物の検出による距離の誤測定を防止し、しかも対象物の反射率が低い場合でも測定可能範囲を比較的遠方まで広げる。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。また、画像生成部4は、変調信号の周期で規定される測定可能な最大距離までの距離範囲内において対象物Obまでの距離が大きいほど小さくなるように距離に応じて設定された基準閾値と受光光量の代表値とを比較するとともに当該代表値が求めた距離に対する基準閾値より小さいときには求めた距離を距離画像の画素値として採用しないようにしてある。
(もっと読む)
パラメータ推定装置、パラメータ推定方法、及び、パラメータ推定プログラム
【課題】 ビデオカメラ等を使って手動操作により撮影した画像から外界の物体の空間情報を獲得、復元するときに、それぞれ焦点距離が変化するため、従来の因子分解法を利用することができず、ピント調整のために変化する焦点距離を同時に復元しなければならないという問題を解決する。
【解決手段】 因子分解処理部63で、各画像の特徴点の時間的変化量を示す画像座標値から行列データを作成し、作成した行列データを特異値分解し雑音除去を行って運動情報を表す行列データと3次元情報を表す行列データとを得て、運動情報の成分において運動を規定するために設定した条件を満足する変換行列を求め、運動情報となる行列データにこの変換行列を作用させてカメラ視点運動を復元し、3次元情報を表す行列データにこの変換行列の逆行列を作用させて物体形状を構成する3次元情報を復元し、焦点距離推定部64で焦点距離を推定する。
(もっと読む)
3次元サーフェスモデル作成システム、画像処理システム、プログラム及び情報記録媒体
【課題】安価なシステム構成で、室内などのテクスチャー付き3次元サーフェスモデルを構築する。
【解決手段】撮影システム2は、室内などの対象を分割撮影し、画像データ及び点群データを画像処理システム1に入力する。画像処理システム1は、グラフィカル・ユーザ・インターフェースを介した対話型処理により、シーン毎の画像データ及び点群データから対象の局所3次元サーフェスモデルを作成し、複数の局所3次元サーフェスモデルを統合した3次元サーフェスモデルを作成する。対話型処理には、各シーンの画像上で、ユーザが点群を選択することにより、この選択された点群に対応したモデル要素の候補面を作成する処理などが含まれる。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
3次元情報取得方法
【課題】パターン光が投影された対象物を撮像することによって取得されるパターン画像に基づき、対象物の3次元情報を取得する技術において、その3次元情報を取得するためにパターン画像に適用される閾値を設定する技術を改良する。
【解決手段】パターン画像の各部分における空間周波数特性に基づき、各部分に対応する空間フィルタ(例えば、可変窓VWの列方向サイズである幅)をパターン画像の各部分ごとに設定する。さらに、パターン画像の各部分に対して空間フィルタを施して取得される画像情報に基づき、対象物の3次元情報を取得するためにパターン画像の各部分に適用される閾値THを各部分ごとに設定する。
(もっと読む)
複合顕微鏡及び複合顕微鏡の測定方法
【課題】測定モードに関係なく光学顕微鏡により取得される形状情報又は走査型プローブ顕微鏡により取得される物性情報を解析すること。
【解決手段】走査型レーザー顕微鏡ユニット10の測定中に、CPU21によってPMユニット9により測定された試料3のSPM像を解析しかつその解析結果を表示部25に表示し、又SPMユニット9の測定中に、CPU21によって走査型レーザー顕微鏡ユニット10により測定された試料3の二次元形状情報若しくは三次元形状情報を解析しかつその解析結果を表示部25に表示する。
(もっと読む)
撮影方法、撮影システム、複合装置、3次元形状復元方法、プログラム及び情報記録媒体
【課題】建物の室内などの対象の3次元形状復元のための画像データを取得する目的などに好適なための撮影方法及び撮影システム。
【解決手段】対象を複数の撮影エリアに分割し、撮影エリア毎に異なった任意の2位置より撮影するための撮像装置201,202、撮影エリアに特徴点を指定するための複数のスポット光を照射する特徴点用スポット光照射装置203、撮影エリアの隣接撮影エリアとの重複部分に撮影エリア間のつなぎ合わせ点を指定するための3以上のスポット光を照射するつなぎ合わせ点用スポット光照射装置204,205、これら各装置を制御する制御装置300からなる。特徴点用スポット光照射装置203と制御装置300は支持テーブル501に固定され、撮像装置201,202はスライド板502,503を介して支持テーブル501に支持される。
(もっと読む)
情報処理方法および装置
【課題】 撮像装置の位置および姿勢を算出する段階において、その算出に利用する指標を移動可能とする。
【解決手段】 現実空間に配置された指標の位置または位置および姿勢に関する配置情報を検出する指標配置情報検出工程と、現実空間の撮影画像を取得する撮影画像取得工程と、記撮影画像から指標を検出する指標検出工程と、前記配置情報と前記指標の検出結果とに応じて、前記撮影画像の撮影視点の位置および/または姿勢を算出する算出工程とを有する。
(もっと読む)
印刷はんだ検査装置
【課題】
印刷はんだ状態の良否の判定に対応して、良否判定を視覚的に確認できるよう、印刷はんだ状態を示す画像を容易に観察しやすくした印刷はんだ検査装置の提供である。
【解決手段】
上記課題を達成するため、画像形成手段9が、印刷はんだ状態の判定と対応関係の取りやすい測定値に基づく3次元画像データであって、基板の所望の一部領域を所望の角度で臨んだ3次元画像を形成して、該角度を変更指定可能に表示手段12bに表示するとともに、撮影手段11が、この3次元画像に対応する、同じ領域を同じ角度で臨んだ実画像を、3次元画像に連動した角度で撮影し、3次元画像と同時に表示する構成とした。
(もっと読む)
乗員の頭部の現在位置を求める方法および装置
本発明は、車両(1)のキャビン(2)内でエアバッグモジュール(5)前方の自動ダイナミック遮断ゾーン(6)へ向かって運動する乗員(8)の頭部(9)の現在位置(A,B,C,D,...)を求める方法に関する。本発明では、頭部(9)の理想運動方向(14)がカメラ(16)の理想観察方向(17)に対して垂直となる空間内の点が測定のベストポジションであるという着想を利用している。有利な実施例では、カメラ(16)のその時点での観察方向(18)に対して垂直な頭部(9)の真の運動ベクトルが計算される。本発明によれば、有利には、車両(1)の乗員保護能力が高められる。本発明の方法は特に今日の車両の乗員保護システムに適する。  (もっと読む)
(もっと読む)
2,001 - 2,020 / 2,128
[ Back to top ]