
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
161 - 180 / 744
車載カメラのカメラキャリブレーション装置
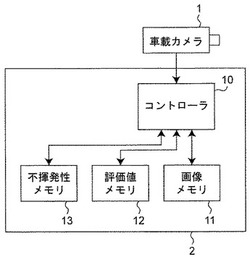
【課題】車載カメラの内部パラメータと外部パラメータの情報を、専用のカメラキャリブレーション用パターンなどを用いずに簡便に求める。
【解決手段】コントローラ10は、車載カメラ1から、白線を含む道路の入力画像を取得し、複数の異なるレンズ歪みパラメータに基づいて入力画像を補正して第1の補正画像をそれぞれ生成し、各第1の補正画像において、各白線に対応する直線を検出し、直線検出結果に基づいて、補正の妥当性を評価するための評価値を計算し、最良の評価値に対応するレンズ歪みパラメータを決定し、決定されたレンズ歪みパラメータに基づいて入力画像から補正された第2の補正画像を生成し、第2の補正画像において、各白線に対応する2本の直線を検出し、検出された2本の直線の交点を消失点位置として決定する。
(もっと読む)
3次元計測装置、その処理方法及びプログラム

【課題】
物体の位置及び姿勢の計測に際して、各エッジに信頼度を付与したモデルを用いて位置姿勢算出処理に対する各エッジの寄与度を変更するようにした技術を提供する。
【解決手段】
3次元計測装置は、3次元幾何モデルを用いて計測対象物体を複数の異なる視点から観測した複数の視点画像を生成し、当該複数の視点画像各々から計測対象物体のエッジを第2のエッジとして検出し、3次元幾何モデルにおける第1のエッジ各々に対して第2のエッジを対応付けた結果に基づいて第1のエッジ各々の信頼度を算出し、当該信頼度を3次元幾何モデルに付与した信頼度付きモデルを生成する。
(もっと読む)
部品実装機の撮像画像処理装置
【課題】部品実装機に搭載したカメラのレンズ歪みを補正する処理の演算負荷を軽減する。
【解決手段】予めドットマーク12をマトリクス状に設けたレンズ歪み補正治具11を部品実装機のコンベアに載せてその上方からカメラでレンズ歪み補正治具11を撮像し、その画像処理により得られたレンズ歪み補正治具11の各ドットマーク12の認識位置と理論位置との差を算出し、その差を画像の各ドットマーク12の位置における歪み量として記憶媒体に記憶しておく。その後、部品実装機の稼働中にコンベアに載せられた部品実装基板をその上方からカメラで撮像し、その画像処理により得られた該部品実装基板の認識対象部位の認識位置を、前記記憶媒体から読み出した該認識対象部位に対応するドットマーク位置における歪み量で補正することで、レンズ歪み補正した認識位置を取得する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、プログラム
【課題】 対象物体の距離画像を利用して位置姿勢を推定する処理において、処理速度を向上させ、メモリ消費量を抑制した位置姿勢計測技術を提供すること。
【解決手段】 撮像された対象物体の距離画像に基づいて、対象物体の位置姿勢を計測する位置姿勢計測装置は、物体モデルと物体領域との距離を示す情報と、部分領域群のうち物体領域として設定されていない部分領域と物体モデルとの距離を示す情報とを比較して、比較の結果により物体領域に新たな部分領域を加える更新部と、更新後の物体領域の3次元点群に物体モデルを当て嵌めて、対象物体の位置及び姿勢を推定する推定部とを備える。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】距離画像から対象物体の位置姿勢を算出する位置姿勢算出の精度低下を防ぎながら処理速度を維持向上させる。
【解決手段】対象物体までの距離画像を取得する取得部と、距離画像から対象物体の概略位置姿勢を決定する概略位置姿勢決定部と、形状モデル上の所定領域に対応する、距離画像における領域の距離情報のばらつきの程度を示すばらつき値を算出する算出部と、ばらつき値が小さい程、サンプル点の数が少なくなるように、形状モデル上の所定領域ごとに当該所定領域からサンプル点をサンプリングするサンプリング部と、概略位置姿勢からサンプル点と距離画像上の2次元計測点を3次元座標に変換した3次元計測点とを対応付ける対応付け部と、各サンプル点と各3次元計測点との間の距離の総和が最小になるように対象物体の位置姿勢を決定する位置姿勢決定部と、を備える。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
位置姿勢推定装置及びその方法
【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
3次元計測装置、処理方法及びプログラム
【課題】3次元形状モデルと計測データとの対応付けの演算の効率化を図り、対象物体の位置及び姿勢の算出を高速化する。
【解決手段】3次元計測装置は、対象物体の3次元形状モデルの幾何特徴上の点を選択し、対象物体の位置及び姿勢を示す概略値と距離画像の撮影時の撮影パラメータとに基づいて当該選択された幾何特徴上の複数の点を距離画像上に投影し、投影点から所定範囲内の領域で3次元形状モデルの幾何特徴に対応する距離画像上の幾何特徴を探索して対応付ける。そして、当該対応付けられた3次元形状モデルの幾何特徴と距離画像上の幾何特徴との3次元空間における距離の差を用いて対象物体の位置及び姿勢を算出する。
(もっと読む)
位置姿勢推定方法及びその装置
【課題】 標準的な形状の三次元形状モデルに比して、形状のばらつきを持つ物体であっても、当該物体の位置姿勢を高精度に推定する方法を提供する。
【解決手段】 物体の三次元標準形状を表す三次元モデルを構成する特徴のずれの統計量を推定し、特徴ごとに信頼度を決定する。撮像装置によって取得した観測データから抽出した特徴と三次元モデル中の特徴とのずれ量を算出する。三次元モデルから抽出した各特徴に関するずれ量と信頼度とに基づいて、物体の三次元位置姿勢を推定する。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
透明体検出システム
【課題】透明体の検出を簡易かつ高精度に行う。
【解決手段】透過光の偏光方向が変化する特性を有する透明体114を含む第一領域を撮像して、垂直偏光画像および水平偏光画像を撮像するカメラ12と、透明体114を載置する載置台113と、カメラ12から載置台113を挟んで、第一領域のうち少なくとも透明体114を含んで撮影される第二領域の範囲を含む位置に設置された偏光フィルタ112と、垂直偏光画像および水平偏光画像に基づく縦横偏光度画像の縦横偏光度の分布に基づいて透明体を検出する画像処理装置13とを備える。
(もっと読む)
顔向き検知装置
【課題】ひとの顔の左右の顔端位置を精度良く検出し、顔向き方向の検知精度を向上させる。
【解決手段】顔向き検知装置10は、乗員カメラ12から出力された顔画像に基づき運転者の顔中心位置を検出する顔中心位置検出部22と、顔画像において運転者の顔を横断する複数の探索線を設定する探索線設定部23と、探索線設定部23により設定された複数の探索線に基づき複数の顔端位置を検出する顔端位置検出部24と、顔端位置検出部24により検出された複数の顔端位置毎に、顔中心位置検出部22により検出された顔中心位置に基づき、顔向き方向を検知し、複数の顔向き方向の中央値を運転者の顔向き方向として検知する顔中心位置検出部22とを備える。
(もっと読む)
表示端末装置及び表示端末装置の表示制御方法
【課題】簡単な構成で筐体の姿勢を速やかに判定でき、その姿勢に応じて画像の表示態様を変えることができる表示端末装置及び表示端末装置の表示制御方法を提供する。
【解決手段】表示端末装置1において、第1光センサ21は、正面5の開口16から正面5に対して直交して入射する光を入光路17を介して受光する。第2光センサ22は、正面5の開口16から正面5に対して斜めに入射する光を入光路18を介して受光する。第1光センサ21及び第2光センサ22における受光強度を、人工光と自然光とに分けてそれぞれで比較する。これにより、周囲の照明状況に応じて筐体2の姿勢を判定できる。判定された姿勢に応じて、ディスプレイ15における画像の表示態様を制御する。
(もっと読む)
ロボットおよびロボットシステム
【課題】
本発明はロボットを複数台運用するロボットシステムに関する。
【解決手段】
第1のロボットは、物体の反射光強度を計測する計測部と、計測部により得られた計測結果を解析する演算部と、第1のロボットを移動させる駆動部と、を備える。第2のロボットは再帰性反射特性を有する複数のマーカを備え、第1のロボットの演算部は、計測部の計測結果に基づき第2のロボットの複数の前記マーカの位置を算出し、算出の結果に基づき第2のロボットの位置および姿勢を認識し、第2のロボットの位置および姿勢の認識の結果に基づき第1のロボットを移動させるためのパラメータを算出し、第1のロボットの駆動部は、パラメータに基づき第1のロボットを移動させる。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
車両検出装置
【課題】レーザ検出手段の検出点を用いて車両の端部を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】上下方向及び左右方向についてそれぞれ異なる複数方向にレーザ光を照射するとともに物体で反射されたレーザ光を受光することにより、物体に対する検出点を取得するレーザ検出手段と、レーザ検出手段で検出している側を撮像する撮像手段と、撮像手段で撮像した撮像画像から車両を含む領域を探索する領域探索手段と、領域探索手段で探索した領域のうちの特定領域に含まれるレーザ検出手段で検出した検出点を抽出し、当該抽出した検出点に基づいて車両の端部を特定する車両端部特定手段を備えることを特徴とする。
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
照明装置及び該照明装置を用いた計測システム
【課題】コントラストの高いパターン投影を実現する。
【解決手段】計測装置と照明装置、撮像装置の位置関係を較正するキャリブレーションを行う(S101)。二次元パターン光の投影面内での輝度の不均一補正処理を行い(S102)、低下したピーク輝度を補償するための光源光量の調節を行う(S103)。計測対象物に二次元パターン光を投影し(S104)、反射された二次元パターン光を撮像装置で撮像する(S105)。撮像装置側の影響で生ずる二次元パターン光の輝度変化及びパターンエッジの位置ずれを、取得した二次元パターン画像に対し不均一補正処理を適用して補正する(S106)。補正処理した二次元パターン画像を基に、計測装置は計測対象物のそれぞれの測定点における奥行き方向の距離情報を取得して距離計測処理を行う(S107)。
(もっと読む)
161 - 180 / 744
[ Back to top ]