
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
121 - 140 / 744
視点位置算出装置
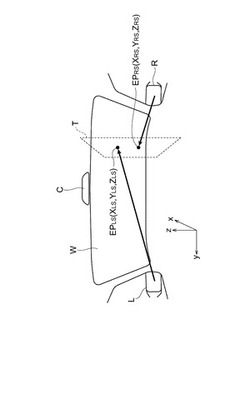
【課題】 運転者の視点位置の算出に係る信頼性の向上を図る。
【解決手段】本発明は、運転者の視点位置EPを算出する視点位置算出装置1であって、右サイドミラーRの角度と車両の運転席着座中心面Tとに基づいて第1の推定視点位置EPRSを算出する第1推定視点位置算出部12と、左サイドミラーLの角度と車両の運転席着座中心面Tとに基づいて第2の推定視点位置EPLSを算出する第2推定視点位置算出部13と、推定視点位置EPRS,EPRSが一致するか否かを判定する一致条件判定部15と、推定視点位置EPRS,EPRSが一致すると判定された場合、当該推定視点位置を運転者の視点位置EPとして算出する視点位置算出部16とを備え、視点位置算出部16は、各推定視点位置EPRS,EPRSが一致しないと判定された場合、推定視点位置EPRS,EPLSに基づいて視点位置EPを算出する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム

【課題】照明部と撮像部の校正時からの変化を異常として検知する。
【解決手段】対象物体の三次元形状モデルの情報を保持する保持部と、撮像部により撮像された対象物体の距離情報を取得する距離情報取得部と、撮像部により撮像された対象物体の濃淡画像を取得する濃淡画像取得部と、保持部に保持された三次元形状モデルの情報と、距離情報とに基づいて対象物体の位置および姿勢を推定する第1位置姿勢推定部と、保持部に保持された三次元形状モデルの情報を濃淡画像上に投影した投影情報と、濃淡画像の幾何特徴とに基づいて対象物体の位置および姿勢を推定する第2位置姿勢推定部と、第1位置姿勢推定部により推定された第1推定値と第2位置姿勢推定部により推定された第2推定値との差分値が閾値より大きいか判定する判定部と、判定部により差分値が閾値より大きいと判定された場合に、撮像部による撮像条件の校正が必要な状態であることを報知する報知部と、を備える。
(もっと読む)
光学式位置検出装置、位置検出機能付き機器および位置検出方法
【課題】対象物体に向き(方向性)があっても対象物体の位置を精度よく検出することができるとともに、対象物体の向きを検出することのできる光学式位置検出装置、位置検出機能付き機器、および位置検出方法を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、複数の光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を受光部30で検出して対象物体Obの位置に対応する複数のデータを生成した後、複数のデータが多数データか少数データかを判定する。そして、多数データに基づいて対象物体Obの位置を検出し、少数データに基づいて対象物体Obの向きを検出する。
(もっと読む)
表面角度計測方法及び表面角度計測装置
【課題】物体表面の角度の検出感度を向上させることができると共に、計測装置から物体表面までの計測距離に依存することなく精密に物体表面の角度を計測することができる表面角度計測方法及び表面角度計測装置を提供することを目的とする。
【解決手段】
計測対象2の表面に計測光を照射すると共に、当該計測対象2で反射した計測反射光を受光することで計測対象2の表面の傾斜角度を計測する表面角度計測装置1において、計測反射光を金属薄膜11で受光すると共に、金属薄膜11で表面プラズモン共鳴を生じさせるプラズモンフィルタ部9を備える。さらに、その表面プラズモン共鳴が生じた金属薄膜11からの反射光の強度を計測する強度検出部15と、強度検出部15で計測された反射光の強度を基に、計測対象2の表面の傾斜角度を算出する傾斜角度算出手段を有する演算部4と、を備える。
(もっと読む)
測定設定データ作成装置、測定設定データ作成方法、測定設定データ作成装置用のプログラム及び寸法測定装置
【課題】 ワークの寸法を測定するための測定設定データを容易に作成することができる測定設定データ作成装置を提供する。
【解決手段】 形状線の位置情報、寸法線の位置情報、寸法線に関連付けられた設計値及び公差からなる設計値情報、並びに、寸法種別情報を含む設計データを取得する設計データ取得部21と、形状線の位置情報、寸法線の位置情報及び寸法種別情報に基づいて、寸法線を形状線によって規定される位置に対応づけることにより、形状線における測定対象箇所及び測定種別を特定する測定対象箇所特定部23と、形状線の位置情報に基づいて、ワーク画像からワークを検出するための特徴量情報を生成する特徴量情報生成部24と、特徴量情報、測定対象箇所情報、並びに、測定対象箇所に関連付けた設計値情報からなる測定設定データを生成する測定設定データ生成部25により構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
位置姿勢計測装置、その計測処理方法及びプログラム
【課題】
計測対象物体の位置及び姿勢に関する複数の計測手法の中からいずれかを選択して実施する。
【解決手段】
位置姿勢計測装置は、撮像装置により撮像された計測対象物体の二次元画像を入力し、距離センサにより計測された計測対象物体の距離データを取得し、二次元画像から計測対象物体の画像特徴を検出し、計測対象物体の状態を判定し、当該判定した状態に基づいて、画像特徴と距離データとを用いて計測を行なう第1のモードと、画像特徴と距離データとのうち一方のみを用いて計測を行なう第2のモードとを含むモードの中からいずれかのモードを設定し、当該設定したモードに従って計測対象物体の位置及び姿勢の計測を行なう。
(もっと読む)
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
(もっと読む)
情報処理方法および装置
【課題】 撮影装置から入力される画像列から指標やセンサの配置情報計測のために必要な画像を自動判定して取得できるようにする。
【解決手段】 複数の視点を移動する撮像装置を用いて、複数の視点ごとに現実空間を撮像した複数の画像を取得し、撮像装置が移動する複数の視点間の移動量を示す評価値を算出し、評価値が予め定められた閾値を超える場合に、移動量が示す移動後の視点で撮像された画像を、補正に用いる画像として決定し、複数の画像のうちの何れを、現実空間に配された位置が既知である指標の位置の補正に用いるかを判定し、補正に用いると判定された画像を用いて、指標の位置を補正する。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法
【課題】 測定される距離の測定誤差を容易に低減できる追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法を提供する。
【解決手段】 追尾式レーザ干渉計1は、移動体に取り付けられたレトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22を有する本体2と、追尾用光学部22からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備えるものであって、制御手段3は、レトロリフレクタRに入射する測定光L2とレトロリフレクタRで反射される測定光L2とを平行とするように検出器222で受光される測定光L21の目標位置Q2を設定する目標位置設定部32と、本体2の姿勢を制御し、レトロリフレクタRで反射された測定光L21を目標位置Q2に入射させる姿勢変更部33とを備える。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
光波干渉測定装置
【課題】回転対称な線織面で構成される被検面の形状等を短時間で測定することが可能な光波干渉測定装置を得る。
【解決手段】回転軸R2回りに回転せしめられる被検レンズ9の被検面(コバ部表面95、嵌合面98、嵌合部底面99)に対し、顕微干渉計1から測定光軸Lに沿って収束しながら進行する低可干渉性の測定光を照射し、被検面の回転位置毎に対応した各回転位置別干渉縞を第1撮像カメラ24の1次元イメージセンサ23により撮像する。この各回転位置別干渉縞の画像データに基づき被検面の形状が解析される。
(もっと読む)
画像処理装置および画像処理方法
【課題】レンズをデフォーカスさせた場合であっても、スポット光の重心位置を高精度に算出することができる画像処理装置および画像処理方法を得る。
【解決手段】光源からの光を集光させたスポット光が入射した画像におけるスポット光の重心位置を算出する画像処理装置(方法)であって、スポット光が入射した画像の各画素の輝度値に基づいて、画像の1次重心を決定する1次重心決定手段(ステップ)と、1次重心を中心とする所定半径の円を描く円描画手段(ステップ)と、所定半径の円と各画素との重複割合を算出する重複割合算出手段(ステップ)と、重複割合を、0から1までの重みに切り詰める重み設定手段(ステップ)と、各画素の輝度値に重みを乗算して、スポット光の重心位置を算出する重心位置算出手段(ステップ)とを備えたものである。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
円錐面測定装置
【課題】被検円錐面と球面測定用干渉計とのアライメント調整を高精度に行い、被検円錐面の径測定の精度を向上させることが可能な円錐面測定装置を得る。
【解決手段】平面測定用干渉計20、2軸傾き調整ステージ32、XYステージ34およびZステージ35により、被検円錐面91と球面測定用干渉計10とのアライメント調整を行うとともに、基準レンズ12のキャッツアイポイントが被検円錐面91上に位置する基準位置に、被検レンズ90を配置する。球面測定用干渉計10からの測定光の一部が被検円錐面91上の円弧状の領域に対し垂直に入射する被検円錐面測定位置に、被検レンズ90を移動させ、基準位置と被検円錐面測定位置との間の距離をレーザ測長機41の検出値により求め、その距離に基づき被検円錐面91の径の測定値を算出する。
(もっと読む)
内面形状測定装置、及び内面形状測定方法
【課題】測定装置が傾斜した場合でも、管内面を正確に測定することができる管内面形状測定装置を提供する。
【解決手段】トンネル1に沿って鉛直方向にレーザビーム2を走査させて、トンネル1内面に照射したレーザビーム2の方位毎の測距データを出力する測域センサ11と、鉛直方向に対して所定の角度θに傾けた方向にレーザビーム3を走査させて、トンネル1に照射したレーザビーム3の方位毎の測距データを出力する測域センサ12と、測域センサ11、12をトンネル1の軸方向に移動する車両5と、車両5により測域センサ11、12を移動させた時のそれぞれの位置座標を検知するエンコーダ8と、測域センサ11、12により検出された測距データに基づいて車両5と管軸との傾き角度を算出し、エンコーダ8により検知された位置座標を、算出した傾き角度に基づいて補正して管内面の三次元表面形状を生成するPC10と、を備えて構成されている。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
121 - 140 / 744
[ Back to top ]