
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
141 - 160 / 744
計測装置
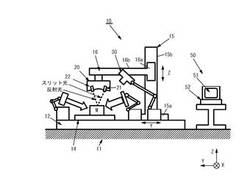
【課題】被検物の温度管理を行って高精度の形状測定が行える計測装置を提供すること。
【解決手段】被検物の形状を測定する計測装置であって、
前記被検物の形状情報を採取する検出手段と、
少なくとも前記検出手段の汚染を防止する気体流を形成する汚染防止気体流形成手段と、
前記被検物の温度を計測する温度計測手段と、
前記被検物の温度を調整する気体流を形成する気体流形成手段と、
前記温度計測手段からの情報に基づいて、前記気体流形成手段を制御して、前記被検物の温度を所定温度範囲に保持する温度制御手段と、を備える。
(もっと読む)
現場作業支援システムにおけるマーカ配置方法

【課題】現場作業支援システムにおけるトラッキング誤差の軽減を実現するマーカ配置方法を提供する。
【解決手段】予め作業現場に設置されたラインマーカ5a,5bと、作業者が携行するカメラ1a〜1cと、作業現場の画像と指示情報を表示して作業者に提供するHMD2と、前記カメラで作業現場を撮影して得た撮影画像中の前記ラインマーカの画像位置に基づいてカメラ(作業者)の位置と向きを計測し、作業者に対して提供する情報画像を作業現場の画像に重ねて前記HMDに表示させる情報処理を行う情報処理装置3を備えた現場作業支援システムにおいて、ラインマーカの位置は、(1)画像処理によって得られるコードマークに含まれる誤差の大きさの推定し、(2)(1)の結果と誤差計算手法及び遺伝的アルゴリズムを用い、様々なラインマーカ配置におけるトラッキング誤差を推定し、ラインマーカの配置を繰り返し計算して誤差を小さくできる位置に決定する。
(もっと読む)
3次元シーンにおける3次元物体の認識及び位置姿勢決定方法
【課題】3次元シーンでの任意の自由形状3次元物体を効率的に認識し、また3次元位置姿勢の抽出を可能とする。
【解決手段】3次元シーンデータにおける3次元物体の実体を認識するための方法は、前記実体の3次元位置姿勢を決定するために、(a)3次元シーンデータを準備するステップと、(b)3次元シーンデータから少なくとも1つの参照点を選択するステップと、(c)選択した各参照点に対して、参照点は3次元物体の一部であるという仮定に基づいて3次元物体の対象位置姿勢を計算するステップと、(d)前記位置姿勢候補をフィルタ処理して一群の位置姿勢を計算するステップとを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
傾き検査装置及び傾き検査方法
【課題】基板に散ったハンダやゴミ等による基板の傾きの誤認識を防ぐこと。
【解決手段】傾き検査装置10は、所定の範囲を撮像領域として、部品が取り付けられる基板2を撮像するカメラが出力する撮像領域の画像より、基板2及び部品の表面の高さを基板2の全域にわたって測定して高さ情報を得る高さ測定部12を備える。また、撮像領域の画像に含まれる基板2の色と、基板2に配置される部材の色と、を異なる2色で表現する2値化情報に基づいて、基板2の色によって表現される箇所に少なくとも3点の測定点を指定する測定点指定部13を備える。また、測定点毎に測定される高さ情報に基づいて、所定の平面に対する基板2の傾きを計算する傾き計算部14を備える。また、基板2の傾きに基づいて高さ情報の補正量を求め、基板2の表面の全域にわたって高さ情報を補正する傾き補正部15と、を備える。
(もっと読む)
キャリブレーション方法
【課題】簡単な構成で正確に等距離に配置された3つの基準点を提供することが可能なキャリブレーション用マーカを用いるキャリブレーション方法を提供することを目的とする。
【解決手段】三角形のマーク(100)を用いて、車両に搭載されたカメラのパラメータの調整を行うことを特徴とするキャリブレーション方法。三角形のマークは、両端部に接続構造を有する第1部材(110)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第2部材(120)と、第1部材と長手方向の長さが同じであって且つ両端部に接続構造を有する第3部材(130)を有し、第1部材、第2部材及び第3部材のそれぞれの接続構造を接続させることによって形成される。
(もっと読む)
カメラ校正装置
【課題】校正用撮像対象物を従来のものより小型化しても精度が高いカメラ校正を行うことができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、少なくとも2点の特徴点を有する校正用撮像物がカメラ120によって撮像された撮像画像と加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像位置および撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
移動体とその旋回半径算出方法
【課題】取付けられる搬送台車によって旋回半径が異なっても、目標地点に到達可能な移動体と搬送台車が取付けられた状態の移動体の旋回半径算出方法を提供する。
【解決手段】搬送台車19が固定される台車取付部20及び駆動車輪12を備え、その場旋回が可能な車両本体11と、車両本体11に装着され、車両本体11から視認できる外環境を撮像するカメラ22と、カメラ22を介して得られる画像中での、車両本体11の旋回前後の特定の被写体の位置から車両本体11の旋回角度θを検知する旋回角度検出手段35と、搬送台車19を固定した車両本体11が旋回角度θ旋回した際のカメラ22の移動距離Dを旋回角度θで除算して、搬送台車19を固定した車両本体11の旋回半径Rを算出する旋回半径算出手段33とを有する。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
カメラ姿勢パラメータ推定装置
【課題】広角カメラの姿勢パラメータを容易にかつ正確に推定する技術を実現する。
【解決手段】カメラ姿勢パラメータ推定装置は、半球以上の視野を有する広角カメラにより得られる広角画像から、実空間における、相互に平行な少なくとも2つの第1直線及び第2直線と、第1直線及び第2直線と垂直な関係を有する1つの第3直線とから構成される特定パターンを形成し得る各線分をそれぞれ取得するパターン取得手段と、このパターン取得手段により取得された特定パターンを形成し得る各線分を用いて上記広角画像に対する2組の消失点ペアを決定する決定手段と、この決定手段で決定された2組の消失点ペアを用いて地面に対する広角カメラの姿勢パラメータを推定する推定手段と、を備える。
(もっと読む)
光学式センサー装置
【課題】検出光が対象物体で反射した光を受光した結果に基づいて対象物体の傾きを検出
することのできる光学式センサー装置を提供すること。
【解決手段】光学式センサー装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。光源駆動部14は、複数の検出用光源12を第1出射強度をもって順次点灯させる
第1モード、および複数の検出用光源12を第1出射強度よりも大の第2出射強度をもっ
て順次点灯させる第2モードを行ない、その間、光検出器30は、対象物体Obで反射し
た検出光L3を受光する。従って、監視部50は、対象物体Obの異なる範囲で反射した
検出光L3の2つの受光結果を用いて対象物体Obの傾きを検出することができる。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
3次元位置・姿勢認識装置およびそれを用いたシステム、方法、プログラム
【課題】対象体の3次元位置・姿勢の認識精度を向上させた、3次元位置・姿勢認識装置を提供することを目的とする。
【解決手段】認識対象となる対象体とその3次元モデルとの3次元的位置・姿勢のマッチングを、ICPアルゴリズムによって行う。それには、3次元モデル上の点群(モデル点群)の各点を注目点として採用し、対象体上の計測点群の中から対応点を探索する。計測点群の各点を注目点とする順マッチング処理との比較上、これを逆マッチング処理と呼ぶ。逆マッチングにおいて注目点として採用される点(モデル点)にはノイズが含まれないため、ICPアルゴリズムにおける対応点探索において、ノイズ点を出発点として対応点を捜すということがない。このため、ノイズ等による誤認識を低減できる。逆マッチングを順マッチング処理と組合せる場合には、先に順マッチングを行ってラフなマッチングを済ませた後に、逆マッチングを行うことが好ましい。
(もっと読む)
物品認識装置及びこれを用いた物品処理装置
【課題】認識対象物品の位置及び姿勢に関する配置情報を高精度に認識する。
【解決手段】認識対象物品1に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、認識対象物品1に対向配置されて認識表示体12を撮像する撮像具5と、この撮像具5の撮像面とこの撮像具5の視野範囲に入る認識対象物品1に設けられる認識表示体12面とが正対しない非正対計測位置P2に少なくとも撮像具5を設置可能とするように撮像具5を支持する支持機構6と、非正対計測位置P2に配置された撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、認識対象物品1の位置及び姿勢に関する配置情報を認識する配置情報認識部7と、を備える。また、この物品認識装置を用いた物品処理装置をも含む。
(もっと読む)
環境に配置された物体の表面上の放物線状湾曲の点を求めるための方法およびシステム
【課題】カメラ−物体対と環境との間の相対運動のもとでカメラによって取得された物体の画像のセットから鏡面物体の表面上の放物線状湾曲の点を求めるためのシステムおよび方法を提供する。
【解決手段】方法は、画像のセットにおける各画像の各ピクセルにおける画像勾配の方向を求める。ここで、物体の表面上の同一点に対応する異なる画像からのピクセルが、対応するピクセルを形成する。画像勾配の実質的に一定の方向を有する対応するピクセルは、放物線状湾曲の点を表すピクセルとして選択される。
(もっと読む)
推定装置、推定方法、及び推定プログラム
【課題】物体の3次元位置・姿勢を示す物体座標系を高精度で推定することができる推定装置、推定方法、及び推定プログラムを提供すること。
【解決手段】本発明の一態様にかかる推定装置は、空間中における対象物体の3次元位置・姿勢を示す物体座標系を推定する推定装置であって、対象物体を撮像した物体画像から、前記対象物体に設けられ、単体で3次元位置・姿勢を推定可能なマーカを検出するマーカ検出部3と、マーカ検出部3で検出された複数のマーカに対応する複数のマーカ座標系を算出するため、それぞれのマーカ画像からマーカ座標系を推定するマーカ座標系推定部と4、複数のマーカ座標系に基づいて、対象物体の物体座標系を決定する物体座標系決定部6と、を備えるものである。
(もっと読む)
非球面体測定方法および装置
【課題】非球面体の内部屈折率分布の影響を受けることなく、また、非球面体が測定光を透過しないものである場合でも、面ずれ量および面倒れ量を測定できるようにする。
【解決手段】第1干渉計1Aと第2干渉計1Bとを用いた反射波面測定により、非球面レンズ9の第1レンズ面91および第2レンズ面92の形状データを求める。各形状データをツェルニケ多項式で近似し、そのときのツェルニケ多項式の係数Z1,Z2の値を求めるとともに、各形状データから第1被検面の頂点偏芯の値および第2被検面の頂点偏芯の値を求める。求められたこれらの値に基づき、第1測定光軸L1に対する第1レンズ面91のシフト量およびチルト量と第2測定光軸L2に対する第2レンズ面92のシフト量およびチルト量を求め、求められた各々のシフト量およびチルト量と、第1干渉計1Aおよび第2干渉計1Bの相対位置関係とに基づき、面ずれ量および面倒れ量を算出する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】 リソグラフィ装置で使用するために、自身の測定ビームの焦点高さによる影響を受け難いことが好ましい代替レベルセンサを提供すること。
【解決手段】本発明は、基板の高さレベルを測定するように構成されたレベルセンサを提供し、レベルセンサは、測定ビームを基板に投影する投影ユニットと、基板で反射した後に測定ビームを受ける検出ユニットと、検出ユニットが受けた反射測定ビームに基づいて高さレベルを計算する処理ユニットとを備え、レベルセンサは、傾斜測定デバイスをさらに備え、傾斜測定デバイスは、反射測定ビームの少なくとも一部を受けるように配置され、公称平面に対する基板の傾斜を表すチルト信号を提供するように構成される。
(もっと読む)
物体情報検出システム、情報検出方法、及びプログラム
【課題】高精度に対象物とマーカとの相対位置及び姿勢を検出する物体情報検出システム、情報検出方法、及びプログラムを提供すること。
【解決手段】物体情報検出システム1は、複数の姿勢における対象物の形状情報を夫々検出する形状検出手段と、対象物に配置されたマーカの位置及び姿勢情報を夫々検出するマーカ検出手段と、形状検出手段により検出された対象物の形状情報と、マーカ検出手段により検出されたマーカの位置及び姿勢情報と、に基づいて、対象物とマーカとの相対位置及び姿勢を算出する位置姿勢算出手段と、を備えている。
(もっと読む)
141 - 160 / 744
[ Back to top ]