
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
101 - 120 / 744
車両のアイドルストップ制御装置
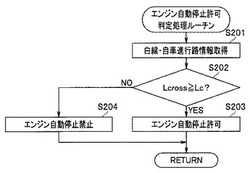
【課題】実際に右左折やUターン等が行われる可能性を精度良く判断して不要なアイドルストップのみを適切に抑制してアイドルストップによる燃費の低減や、排気ガスの低減の効果を十分に得る。
【解決手段】通常、アイドルストップ実行条件が成立した場合に、エンジン1のアイドル運転を停止してエンジン1を自動停止させるアイドルストップを行わせるが、この際、白線上に投影した位置から交差ポイントまでの距離Lcrossが予め設定する距離Lcより短い場合は、エンジン1の自動停止を禁止させる。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置

【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
3次元情報取得装置および3次元情報取得プログラム
【課題】対象と初期状態が異なる場合、この対象と初期状態との違いに基づく最適化処理の解の誤差を軽減すること。
【解決手段】位置姿勢逐次計測手段の初回起動時において最初に求めた初期フレームに対応する前記特徴点座標と前記カメラポーズ情報に対して、前記3次元座標および前記カメラポーズ情報の信頼度に応じて予め決められている加重値に基づく補正を行い、前記3次元座標の最適化を行う最適化処理手段を備えることを特徴とする。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】X方向(又はY方向)へ移動する第1のステージ(14)、第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージ(16)、及び第2のステージに搭載されθ方向へ回転する第3のステージ(17)を有する移動ステージにチャック(10a,10b)を搭載する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージ(16)に取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージ(17)によりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
用紙搬送装置及び画像形成装置
【課題】本発明の目的は、短時間に高い精度で用紙の移動状態を非接触で検出できる移動状態検出手段を用紙搬送路に配設し検出された用紙の移動状態を変更して、用紙の片寄り、用紙の変形による画像不良を未然に防止可能にする用紙搬送装置及び画像形成装置を提供することにある。
【解決手段】本発明は、用紙搬送手段と、移動する用紙表面における異なる領域を互いに連続的に撮影して画像を出力する複数の撮像手段ISと、複数の撮像手段ISより出力された画像に基づき複数の領域における用紙の移動速度、用紙の移動量、もしくは用紙の移動方向を検出する移動状態検出手段IPと、移動状態検出手段IPの検出結果に基づき用紙搬送手段を制御する用紙搬送制御手段U100と、を備える用紙搬送装置20を提供して、上記課題の解決を達成可能にする。
(もっと読む)
計測用マーカ及びその製造方法
【課題】光源を内蔵せずに任意の方向から観測可能な位置計測用パターンを有する計測用マーカであって、計測用パターンの作製精度を維持しつつ従来と比べて製造工程を減少する計測用マーカ及びその製造方法を提供する。
【解決手段】計測用マーカ1Aは、基材11と、基材11上に貼り合わされて照射光leを再帰反射する再帰反射材10と、照射光leを透過する複数の開口部14を有するパターンが印刷され、再帰反射材10上に貼り合わされる透明基材12とを有する。
(もっと読む)
光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム
【課題】レーザースキャナを用いた得た三次元点群位置データを補完する三次元点群位置データを撮影画像から得る技術において、当該撮影を行う条件における撮影手段のキャリブレーションを効率よく簡便に行う。
【解決手段】第1の視点から建物120のレーザースキャンを行い、三次元点群位置データを得る。他方で、第2の視点から第1の視点でオクルージョンとなる建物120の部分のステレオペア画像の撮影を行う。そして、第2の視点で得たステレオ画像と第1の視点で得た三次元点群位置データとの対応関係を求めることで、当該三次元点群位置データを利用してのステレオペア画像撮影装置124のキャリブレーションを行なう。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
画像相関変位センサ
【課題】簡便な構成でターゲット面と垂直な成分を含む方向の変位量を測定することができる画像相関変位センサを提供すること。
【解決手段】本発明の一態様にかかる画像相関変位センサは、照射光を出射する照射部130'と、ターゲット面300で生成したスペックルフィールドを複数回に亘って撮像するために用いられ、ターゲット面近傍においてターゲット面の法線方向から傾斜した光線路Aと、光線路B'と、光線路A,B'の少なくとも一方を偏向する素子110'と、を有する撮像部240と、光線路Aにおいて撮像することにより得られた複数画像と光線路B'において撮像することにより得られた複数画像とに基づいて、ターゲット面300の法線成分を含む方向の変位を計算する処理部200と、を備えている。
(もっと読む)
パターン検査装置
【目的】パターン領域と非パターン領域の間に段差がある被検査試料であっても、効率的に検査可能なパターン検査装置を提供する。
【構成】パターン領域内に指定される被検査領域を記憶する被検査領域記憶部と、被検査試料上のパターン面高さ測定位置に対するパターン面高さ信号を検出するパターン面高さ検出部と、パターン面高さ検出部で検出されるパターン面高さ信号を用いて、被検査試料に対するフォーカスを合わせるオートフォーカス機構と、パターン面高さ測定位置が被検査領域内に位置するか否かを判定する判定部と、判定部が、パターン面高さ測定位置が被検査領域内に位置すると判定する場合にはオートフォーカス機構を駆動し、パターン面高さ測定位置が被検査領域内に位置しないと判定する場合にはオートフォーカス機構を停止するオートフォーカス機構制御部と、を有することを特徴とするパターン検査装置
(もっと読む)
人体姿勢推定装置、人体姿勢推定方法、およびコンピュータプログラム
【課題】複雑な動きが含まれる人体の姿勢推定を高精度に行う。
【解決手段】リファレンスモーションデータから、動きのリズムを表して動きの突然的な変化が生じているフレームであるビートフレームを取得する動き解析部110と、リファレンスモーションデータを分割した複数のセグメントそれぞれについて、各潜在空間でGPDMを学習し、それぞれ学習したGPDM同士で遷移可能な潜在空間の座標として、ビートフレームに対応する潜在空間の座標を用いて推定するモデル構築部120と、ビートフレームと遷移可能な潜在空間の座標とに基づいて、ユーザの動きを撮影したユーザビデオデータの映像における人体姿勢を追跡する動き追跡部20とを備えた。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
校正基準点取得システム及び校正基準点取得方法
【課題】撮像装置のキャブリレーションに用いる校正基準点を、小規模な装置環境で高精度に取得する。
【解決手段】校正対象の撮像装置20に対してレーザ光のような広がりのない光を照射する発光装置10、撮像装置10の向きを調節する角度調節装置30、該角度調節装置30に角度指令を与える角度制御装置40、撮像装置20より得られる撮像画像から集光点位置を検出し、校正基準点を算出する画像処理装置50を有する。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】影が落ちる領域に相当する画像領域から抽出される擬似的な画像特徴の影響を軽減し、フィッティング/マッチングの安定性・精度を向上する。
【解決手段】対象物体の2次元画像を取得する画像取得部と、対象物体の距離画像を取得する距離画像取得部と、距離画像の計測不能領域を対象物体に照射される照明が遮蔽される被遮蔽領域として抽出する抽出部と、対象物体の位置姿勢の概略値に基づいて3次元モデルを2次元画像上に投影する投影部と、投影された線分を構成する点とエッジを構成する点とを組として対応付ける対応付け部と、エッジを構成する点が被遮蔽領域内に存在するか否かを判定する判定部と、存在する場合の組が位置姿勢計測に用いられる重み係数を、存在しない場合の重み係数よりも小さく設定する設定部と、対応付けられた線分を構成する点とエッジを構成する点との距離に重み係数を乗じた値の総和が最小となる位置姿勢を計測する計測部と、を備える。
(もっと読む)
光源方向特定装置及び光源方向特定プログラム
【課題】少ない構成部品及び簡単な処理で、光源の方向を特定する。
【解決手段】デジタルフォトフレームは、光源40から出射された光が一端の開口から入射し、入射した光によって開口の周辺の内壁が照らされる筒状のレンズフードと、レンズフードの他端側に配置され、レンズフードの開口及び開口に繋がる内壁を撮像する撮像装置30と、撮像装置30が撮像した撮像画像90cに基づいて、撮像画像90cの中の内壁における所定の基準以上の明るさを有する明領域R3を特定し、特定した明領域R3に基づいて光源40の方向を特定する光源方向特定部と、を備える。具体的には、光源40の光源方向特定は、明領域R3の点B3の中心点Pに対する相対座標に基づいてなされる。
(もっと読む)
101 - 120 / 744
[ Back to top ]