
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
41 - 60 / 744
画像センサのチルトを求めるための方法
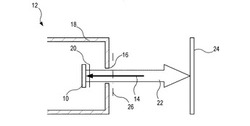
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
3次元計測方法

【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
光軸調整システム
【課題】撮影画像における基準マーク画像のズレを考慮することにより光軸調整の誤差を低減する。
【解決手段】カメラ2と、タッチパネル式ディスプレイ3と、画像処理ECU4と、を備え、画像処理ECU4は、タッチパネル式ディスプレイ3の操作によりカメラ2により基準マークが撮影された撮影画像における基準マーク画像の位置が指示位置として指示されると、この指示位置と所定の基準位置との関係に基づいてカメラ2の光軸調整を行う光軸調整部41と、撮影画像の画面特性に基づいて撮影画像における基準マーク画像の位置ズレ量を算出する位置ズレ量算出部42と、位置ズレ量算出部42が算出した位置ズレ量により指示位置を補正する指示位置補正部43と、を備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】 計測対象物体からの反射光を用いて3次元計測を行う手法において、計測の誤差に起因する、計測対象物体の3次元位置の取得精度の低下を防止することを目的とする。
【解決手段】 構造化光が投影された計測対象物体からの反射光の情報と、前記構造化光の光源の位置と、前記反射光を受光して前記反射光の情報を取得する受光部の位置とを用いた三角法により、前記計測対象物体の表面の複数の位置を取得する第一の取得手段と、前記複数の位置に基づき、前記計測対象物体の表面の位置および向きを取得する第二の取得手段と、前記複数の位置を取得する際の計測の誤差に関する情報と、前記計測対象物体の表面の位置および向きとに基づき、前記複数の位置の少なくとも一つを補正する補正手段と、を有することを特徴とする。
(もっと読む)
基板位置合わせ方法、基板位置合わせ装置、コンピュータプログラム、及びコンピュータ可読記憶媒体
【課題】周縁部に少なくとも2つの直線部が形成される略円形の基板を精度良く位置合わせすることが可能な基板位置合わせ方法を提供する。
【解決手段】周縁部に少なくとも2つの直線部が形成される概ね円形の基板を位置合わせする基板位置合わせ方法であって、基板を保持して回転する保持回転部により前記基板を自転させながら、前記基板の周縁部に向けて発せられた光を受光した受光部から信号を取得し、取得した信号の強度と前記基板の回転角度とを関連付ける工程と、前記信号の強度の変化に基づいて、前記2つの直線部に対応すべき2つの回転角度区間を検出する工程と、前記信号の強度に関連付けられた前記回転角度に基づいて、前記2つの回転角度区間の角度差を求める工程と、前記角度差が所定の範囲内に収まるか否かを判定する工程と、前記判定する工程において前記角度差が所定の範囲内に収まると判定された場合に、前記2つの回転角度区間が、対応する前記2つの直線部に相当すると決定する工程とを含む基板位置合わせ方法が提供される。
(もっと読む)
光学式検査装置、検査システムおよび座標管理用ウエハ
【課題】欠陥座標に含まれている誤差を低減可能な光学式検査装置を提供する。
【解決手段】チャンネルが配列されたラインセンサと、ウエハをステージに載せてラインセンサに対して移動させる移動手段と、行列の行毎に1つ且つ列毎に1つ擬似欠陥ダイが形成され擬似欠陥ダイには複数の擬似欠陥が列方向に一列に形成されている座標管理用ウエハを検査したのを受けてチャンネル上に結像した擬似欠陥のステージ上の位置を擬似欠陥ステージ座標Xs0として検出するステージ位置検出手段と、擬似欠陥ステージ座標Xs0を擬似欠陥ダイ座標に変換する座標変換手段と、設計座標に対する擬似欠陥ダイ座標の差分ΔXを算出する差分算出手段と、擬似欠陥ステージ座標Xs0に対して差分ΔXが一定の振幅A1で振動し直線L1に沿って増加又は減少する座標誤差特性パターンCP1を取得する特性パターン取得手段とを有する。
(もっと読む)
測定装置
【課題】入遮光位置の測定精度を高める。
【解決手段】検出光を出射する投光素子62と、前記投光素子62と対向配置されたイメージセンサ85と、前記イメージセンサ85から受光信号を読み出す信号読出回路90と、前記受光信号のレベルと所定の基準レベルとを比較し、被検出物が前記検出領域を通過した際に、前記受光信号のレベルが基準レベル以上から前記基準レベル以下に、あるいは前記基準レベル以下から前記基準レベル以上に変化する入遮光位置を測定して出力する測定回路120とを備え、前記信号読出回路90と前記測定回路120の間に、前記信号読出回路90で読み出される受光信号波形から所定周波数の信号成分を除去する第一フィルタ回路100を備える。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
断面積測定装置、プログラム
【課題】測定対象物の断面積を精度良く測定する。
【解決手段】変位測定装置では、測定対象物が載置されている断面形状出力範囲の複数の測定点における変位を測定し、測定された変位から測定対象物の形状データを算出する際に、複数の測定点に対応する複数の変位情報を大きさで順番付けした場合に、最も大きい側から予め定められた第1割合に含まれる変位と、最も小さい側から予め定められた第2割合に含まれる変位と、を除いた中間変位情報を選出し、この中間変位情報を圧縮係数を用いて圧縮処理した圧縮変位情報を加算して測定対象物の断面積を測定する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法
【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
センサ角度の測定方法
【課題】簡便な構成により曲折部における加工品位を向上させることができるセンサ角度の測定方法を提供する。
【解決手段】ワーク3上の各教示点Pi及び対応する追加点Qiにセンサ4を順次位置させ、センサ4でワーク3までの距離を計測して各教示点Piにおけるセンサ4のワーク3に対する角度を測定する際に、溶接線13がワーク3の曲折部10の前後にわたる場合、各教示点Piに対応する追加点Qiを、教示点Piが、曲折部10に至る直前の加工ライン13についての最後の教示点Pmでない場合には当該教示点Piの前方に位置させ、最後の教示点Pmである場合にはその後方に位置する追加点Qmとする。
(もっと読む)
検査結果表示装置、基板検査システムおよび検査結果表示方法
【課題】不良が生じている検査ポイント、および正常な検査ポイントを確実かつ容易に認識させる。
【解決手段】検査結果表示装置2は、個別的に付与された基板情報が二次元コードによって基板表面に記されると共に各検査ポイント毎の検査結果データD1が基板情報に関連付けて記録されている被検査基板10を撮像して撮像データD2を出力する撮像部21と、データD2に基づいて、データD2の画像内における二次元コードの位置決め用シンボルの位置を特定すると共に、被検査基板10における位置決め用シンボルと各検査ポイントとの位置関係を特定可能な位置データD0に基づいてデータD2の画像内における検査ポイントの位置を特定し、かつ、データD1に基づいて特定した各検査ポイント毎の検査結果を示す結果表示をデータD2の画像内における検査ポイントの位置に重ねた検査結果表示画面を表示部24に表示させる処理部25とを備えている。
(もっと読む)
すき入れ位置検査方法
【課題】 すき入れ及び紙端を鮮明に撮像し、すき入れが施された位置をばらつきが生じることなく高い精度で測定する検査方法を提供する。
【解決手段】
あらかじめ紙端撮像ラインカメラの撮像条件を紙端が鮮明に撮れる撮像条件に設定し、すき入れ撮像ラインカメラの撮像条件をすき入れが鮮明に撮れる撮像条件に設定した後、各ラインカメラにおいて紙端画像とすき入れ画像とをそれぞれ取得し、紙端画像から紙端を示す座標を検出し、すき入れ画像からすき入れを示す座標を検出し、紙端の座標からすき入れの座標までの距離を算出した後、算出した各座標間の距離が許容範囲か否かを判定してすき入れが形成された位置の合否判定を行う。
(もっと読む)
検出対象物について頭部分の位置および軸部分の方向を算出する方法、装置およびプログラム
【課題】第1の径を有する軸部分と、軸部分の一端に設けられた第1の径より大きな第2の径を有する頭部分とを含む検出対象物について、頭部分の位置および軸部分の方向をより高速に算出する方法、装置およびプログラムを提供する。
【解決手段】本方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、入力画像から、軸部分に相当する領域を軸領域として抽出するステップと、入力画像内の明るさの変化から頭部分の候補位置を抽出するステップと、軸領域および候補位置についての高さ情報を取得するステップと、軸領域との間の相対的な位置関係から、軸領域に対応する検出対象物の頭部分に相当する位置を候補位置から抽出するステップとを含む。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
41 - 60 / 744
[ Back to top ]