
Fターム[2F065AA37]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755)
Fターム[2F065AA37]の下位に属するFターム
表裏又は特定の向き (11)
Fターム[2F065AA37]に分類される特許
61 - 80 / 744
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
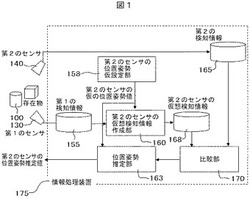
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム

【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
三次元計測装置および三次元計測方法
【課題】 最適パターン光投影のような強度変調パターン光投影手法による静止物体の三次元画像計測を行う。
【解決手段】 ワークWにパターン光を投影するパターン投影機21と全面照明機22と、パターン光が投影されたワークWを撮像して画像を撮像するカメラ23、24により撮像した画像のデータを処理するデータ処理装置42とから構成され、パターン投影機21によりパターン光を投影して画像を撮影する第1撮像モードと、全面照明機22による全照明反射画像を撮像する第2撮像モードがワークWの種類の特定によって判定される。その撮像結果によって三次元情報が算出されるので、精度の高い三次元情報を得ることができる。
(もっと読む)
入力装置、入力制御方法及びプログラム
【課題】 低消費電力でコストを掛けずに直感的な遠隔操作を行えるようにすることにある。
【解決手段】 入力装置(10)は、離隔位置にある所定立体形状のマーカ体(18、33、42)を画像認識する画像認識手段(8)と、前記画像認識手段の認識結果に基づいて前記マーカ体の姿勢を判定する姿勢判定手段(13)と、前記姿勢判定手段の判定結果に対応したイベントを発生するイベント発生手段(15)とを備える。マーカ体(18、33、42)の画像を認識し、その画像に基づいてマーカ体の姿勢を判定して遠隔操作用のイベントを発生する。リモコンに適用する場合は、リモコン本体にマーカ体を取り付ければよい。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】撮像部の姿勢の容易な調整を可能とする。
【解決手段】ワークの搬送路の少なくとも一部を撮像視野に含むように配置された撮像部110から、撮像によって得られた撮像画像を受理する画像処理装置であって、搬送路上に置かれた目標物を、撮像部110が撮像することによって取得された撮像画像を受理する画像受理手段と、受理された撮像画像における目標物の位置を取得する位置取得手段と、位置取得手段によって取得された目標物の撮像画像における位置を用いて、撮像部110の撮像視野を含む面の、目標物が置かれた面に対する傾き度を取得する傾き取得手段と、取得される傾き度を用いて、撮像部110の姿勢調整を支援するための支援情報を出力する出力手段と、を備える。
(もっと読む)
走路推定装置及びプログラム
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
計算装置、計算方法及び計算プログラム
【課題】手間を掛けずに精度高く、カメラの設置高や設置角度を計算可能な計算技術を提供することを目的とする。
【解決手段】計算装置は、第1取得部と、第2取得部と、計算部と、を備える。第1取得部は、各々異なる位置にあるときの同一の対象物が同一のカメラにより、各々撮影された複数の画像を取得する。第2取得部は、対象物の高さを取得する。計算部は、複数の画像及び高さを用いて、カメラの設置角度及び設置高を計算する。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
61 - 80 / 744
[ Back to top ]