
Fターム[2F065FF32]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 時間測定 (457) | 時間間隔測定 (179)
Fターム[2F065FF32]に分類される特許
1 - 20 / 179
三次元座標測定装置、三次元座標測定方法、及びプログラム
環境認識装置
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
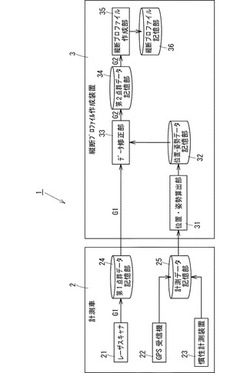
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
画像測定装置

【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
撮像装置及びプログラム
【課題】CMOS型イメージセンサ等を用いて、ローリングシャッター方式で撮像されたボール像が歪んでいても、ボールの運動を正確に解析することができるようにする。
【解決手段】撮像装置100は、ボール像が楕円形に歪んだ状態で含まれるフレームを、内領域A3とその内領域A3と内領域A3の外側の外領域A4とを有する楕円分離度フィルターによってフィルタリング処理することによって、分離度を算出する分離度算出手段7gと、内領域A3の中心位置、長径、短径及び傾斜角を変更しながら分離度算出手段7gによって算出される分離度が最大となる中心位置、長径、短径及び傾斜角をボール像の中心位置、長径、短径及び傾斜角として推定する推定手段7hと、推定手段7hによって推定されたボール像の中心位置の差分とフレーム間のフレーム数とフレームレートとから、ボールの速度を算出する速度算出手段7pと、を備える。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
人体検知装置及び該人体検知装置を備えた画像処理装置
【課題】人の接近を高精度に判定することができる人体検知装置等を提供する。
【解決手段】それぞれ一対の正負電極10a,10b,20a,20bを有する第1及び第2の焦電型センサ10,20と、各焦電型センサを被覆するレンズ3を備える。垂直状被取付面51に対して直交する面からなる検知エリア6において、第1の焦電型センサの正負電極に対応する第1の正極視野100aと負極視野100b、第2の焦電型センサの正負電極に対応する第2の正極視野200aと負極視野200bを含む検知ブロック300、301が、第1の正極視野と負極視野を結ぶ仮想線100cまたはその延長線と、第2の正極視野と負極視野を結ぶ仮想線200cまたはその延長線が交差する態様で形成されている。交点から被取付面51への垂線について、各仮想線同士が線対称に形成されている。
(もっと読む)
膜厚の検査装置および検査方法
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
位置座標対応テーブル作成システム及び位置座標対応テーブル作成方法
【課題】車両に搭載された車載装置にて取得される車両の世界座標系と路側装置にて取得される車両のカメラ座標系との対応テーブルを作成する処理の効率化を図る。
【解決手段】車両の世界座標系の位置座標データを取得するとともに、光源/熱源を、その間隔が不均等となるパターンで間欠出力する車載装置20と、車両を撮影する路側装置10と、車載装置20における光源/熱源の出力タイミング情報と、路側装置10にて撮影された画像に含まれる光源/熱源の出力タイミングとに基づいて、車両の世界座標系の位置座標データと車両のカメラ座標系の位置座標データとを時刻同期させ、車両についての世界座標系の位置座標データとカメラ系座標の位置座標データとの対応テーブルを作成する位置対応テーブル作成部30とを有する。
(もっと読む)
周辺監視装置
【課題】簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供する。
【解決手段】他車両22が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両22の位置を測定する周辺監視装置であって、自車両21進行方向の路面上の所定領域を検出領域Rとして、該検出領域Rに、他車22両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、前記検出手段で検出された、自車両21から見た前記光投影パターンに基づいて、自車両21の進行方向に対する他車両22の進行方向の角度を測定する測定手段とを備える。
(もっと読む)
跳躍動作測定装置及び跳躍動作測定方法
【課題】被験者の跳躍動作をより好適に測定することができる跳躍動作測定装置を提供する。
【解決手段】カメラ20によって撮像された画像データに基づいて、測定部13が、カウンタームーブメントジャンプ動作、スクワットジャンプ動作、ホッピングジャンプ動作、及び立ち上がり動作の中から測定動作選択部12によって選択された測定対象の跳躍動作の測定を行い、情報出力部15が、測定結果に基づいた情報を出力する。また、情報提供部14が、選択された跳躍動作となるように、被験者Aに対して、カメラ20によって撮像された画像データに基づいた情報提供を、モニタ30を通じて行う。
(もっと読む)
3次元形状測定装置
【課題】低コストで複数の被測定物を測定することができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置は、非線形媒質30を有し、該非線形媒質30に照射された第1偏光状態の複数の反射チャープ光102、104、106をポンプ光が照射された期間で切り出すシャッタ部を備え、非線形媒質30は、シャッタリング光が照射された期間に照射された反射チャープ光102、104、106の偏光状態を第2偏光状態に変化させるものであり、シャッタ部は、非線形媒質30によって偏光状態が変わった反射チャープ光102、104、106を抽出することで、所定のタイミングで反射チャープ光102、104、106を切り出し、複数の照射装置は、非線形媒質30におけるポンプ光の非線形効果の有効範囲100内に反射チャープ光102、104、106を集光させる。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
1 - 20 / 179
[ Back to top ]