
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
361 - 370 / 370
3次元形状測定装置および方法

【課題】 測定点密度を増加させながらコード探索エラーを減少させる。
【解決手段】 2つのストライプパターンがフレームメモリ110に記憶される。パターン切替部190によりストライプパターンが切り替えられ、2つのストライプパターンを連続して投射し、それぞれのストライプパターンの投影像を撮像して2つの撮像画像を得る。それぞれの撮像画像にエッジ抽出処理とコード付与処理を行い、2組のコード化エッジ画像を獲得する。得られた2組のコード化エッジ画像を重畳して、エッジ密度が高く、コード分布の良好なひとつの統合コード化エッジ画像を獲得する。求められた統合コード化エッジ画像に対して距離計測の計算を実施することで、複数のコード化エッジ画像に対して各々に距離算出を行う場合に比べて、距離算出時のアルゴリズムに起因するエラーの発生をより少なくすることが出来る。
(もっと読む)
3次元形状計測システム

【課題】 パターン光を投影した試料の画像に、フーリエ変換を施し位相を求め、それをもとに試料の3次元形状を計測する装置において、入力する画像の枚数を削減し、計測時間の短縮を図る。
【解決手段】 基準平板1に表示された基準パターンがカメラ5で撮像される。そして、得られた表示画像に対して、フーリエ変換位相シフト法を用いることで表示位相画像が求められる。同様に、基準平板1及び試料にプロジェクタ6から投影された投影パターンが撮像された画像をもとに、それぞれ投影位相画像及び試料位相画像が求められる。このとき、試料画像を撮像する際の位相シフトを、X方向のみに限定する。そして、得られたX方向のみの試料位相画像をもとに、試料の3次元形状が求められる。
(もっと読む)
位相計測システム
【課題】 パターン光を投影した試料の画像に、フーリエ変換を施し位相を求め、それをもとに試料の3次元形状を計測する装置において、入力する画像の枚数を削減し、計測時間の短縮を図る。
【解決手段】 プロジェクタ6から試料1に投影された第1のピッチを有するパターンの参照画像が、カメラ5により撮像される。続いて、プロジェクタ6から試料に投影された第2のピッチを有するパターンの測定画像が、カメラ5により撮像される。ここで、パターン光の第2のピッチは、第1のピッチを有するパターン光の位相分解能を基準として算出される値によって決められる。そして、得られた参照画像をもとに、測定画像の位相接続が行われる。これにより試料の3次元形状が求められる。
(もっと読む)
三次元ビデオスキャナ
少なくとも一つの波長を有する光を分析するための装置であって、光を偏向して光の少なくとも一つの波長に相当する少なくとも一つの波長依存角度を特徴とする偏向された光ビームを与える偏光器(12)と、偏向された光ビームを符号化して少なくとも一つの波長依存角度に相当する少なくとも一つの角度依存偏向状態を特徴とする符号化された光ビームを与えることができる符号器(20)と、符号化された光ビームを復号して光の少なくとも一つのスペクトル成分を決定するための復号器(24)とを含む。 (もっと読む)
三次元分光的符号化撮像のための方法と装置
位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。 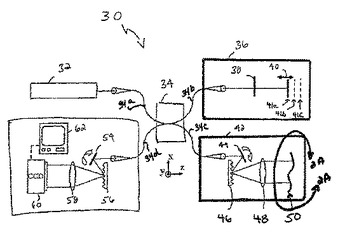 (もっと読む)
(もっと読む)
高速マルチプルライン三次元デジタル化法
【解決手段】 本システムは、物理的対象物を三次元画像化するための高速マルチプルラインデジタル化を提供する。フルフレームの三次元データが、デジタルカメラのフレームレートと同じ程度に取得される。 (もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 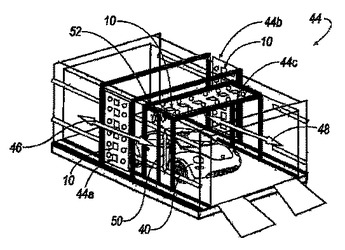 (もっと読む)
(もっと読む)
光学的形状測定装置
【課題】 照射角度を、照射されたパターン光の光量の情報から求める光学的形状測定方法において、光量のS/Nの劣化を防止して、形状測定精度が劣化するという問題を解消した光学的形状測定装置を提供すること。
【解決手段】 互いに重なりのない複数のスリット状の部分領域に分割された測定領域15の各々を照明する照明手段4と、各測定領域毎の反射光を検知する検知手段10と、この検知手段10で検知した各反射光の光量13から、前記照明手段4と検知手段10の視差を利用して前記各測定領域15−1〜15−6の形状データを推定する形状推定手段11と、推定された測定領域の形状データ16における部分領域の曖昧さを除去して各部分領域の曖昧さのない形状データ14を求める形状補正手段12とからなる光学的形状測定装置。
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
3次元情報入力カメラ
【課題】 被写体や照明光の影響を受けることなく、正確な3次元情報の入力が可能である3次元情報入力カメラを提供する。
【解決手段】 3次元情報入力カメラは、被写体または照明光についての撮影条件を検出する撮影条件検出手段を備える。投影手段1は、2種以上のパターン光を選択可能に投影できるように構成される。投影手段1は、撮影条件検出手段による被写体または照明光についての撮影条件検出結果に基づいて、投影するパターン光の種類を選択して投影する。
(もっと読む)
361 - 370 / 370
[ Back to top ]